I Изобретение относится к стяжным устрой- i ствам, применяемым для соединения двух I деталей для выполнения операций по подтя- I гиванию, поджиму и фиксации отдельных I частей механизмов и конструкций.
Цель изобретения - обеспечение надежной безотказной работы гидравлического талрепа в любых условиях эксплуатации и расширение функциональных возможностей. На фиг. 1 показана принципиальная гид- : равлическая схема устройства; на фиг. 2 - устройство, общий вид; на фиг. 3 - узел I на фиг. 2.
Устройство (фиг. 1) включает гидроцилиндр, состоящий из корпуса 1 с поршнем 2 и штоком 3, двухпозиционный.кран 4 с руко- яткой 5, имеющий трехходовой 6 и двухходовой 7 управляющие элементы, ручной насос 8 с рукояткой 9 (например, поршневой с клапанами), предохранительный клапан 10, компенсатор 11 (например, поршень) с упругим элементом (например, пружиной) 12 и магистрали с 13 по 24. Корпус гидроцилиндра имеет штоковую 25, поршневую 26 и дополнительную 27 полости. В нерабочей зоне последней выполнено сквозное радиальное отверстие 28 для выхода воздуха. I Рукоятка 5 двухпозиционного крана 4 име- ; ет два положения: I - выдвижение порш- I ня 2 со штоком 3 и II - рабочий : ход - втягивание поршня 2 со штоком 3. Вы- ; ход насоса 8 магистралями 16 и 17 соединен : со входом трехходового управляющего эле- : мента 6 двухпозиционного крана 4, первый ; выход трехходового управляющего элемен- 1 та 6 магистралью 19 соединен со игтоковой i полостью 25 гидроцилиндра, второй выход трехходового управляющего элемента 6 ма- I гистралями 20 и 21 соединен с поршневой I полостью 26 гидроцилиндра и одновремен- но магистралью 22 со входом двухходового управляющего элемента 7, второй выход двух i ходового управляюшего элемента 7 .магист- i ралями 23, 15 и 14 соединен со входом на- coca 8 и одновременно магистралью 13 - с дополнительной полостью 27 гидроци- линдра.
; Устройство работает следующим образом. Для производства рабочей операции - стягивания элементов конструкции - устрой- ство приводится в исходное положение.
Рукоятка 5 двухпозиционного крана 4 ставится в, положение I - «выдвижение (фиг. 1 и 2). Качанием рукоятки 9 ручной насос приводится в действие. При этом ра- бочая жидкость из дополнительной полости 27 по магистралям 13. 14, 16, 17, трехходовой управляющий элемент 6 крана 4 по магистралям 19-21 подается в штоковую 25 и поршневую 26 полости гидроци.чнидра одновременно, т.е. гидроцилиндр включается в действие по дифференциальной схеме, что обеспечивает быстрое выдвижение порпшя 2
со nJTOKOM 3.
После прихода поршня 2 со штоком 3 в крайнее выдвинутое положение операция «выдвижение прекращается. Для предохранения устройства от перегрузки существует предохранительный клапан 10. При достижении поршнем 2 со штоком 3 крайнего выдвинутого положения срабатывает предохранительный клапан 10. Выход насоса 8 по магистралям 16 и 18 через предохранительный клапан 10 по магистралям 24, 15, 14 соединяется со входом (насос закольцовывается), одновременно через магистраль 13 вход и выход насоса соединяются с дополнительной полостью 27.
Стыковочные элементы устройства соединяются с элементами стягиваемой конструкции. Произвдится рабочая операция. Рукоятка 5 двухпозиционного крана 4 ставится в положение II - «рабочий ход. Качанием рукоятки 9 ручной насос приводится в действие. При этом рабочая жидкость из насоса 8 по магистралям 16 и 17 через трехходовой управляющий элемент 6 крана 4, магистраль 19 поступает в щтоковую полость 25. Поршень со штоком начинают втягиваться в корпус 1 гидроцилиндра. При этом рабочая жидкость из поршневой полости 26 вытесняется по магистралям 21 и 22, через двухходовой управляющий элемент 7 крана 4, по магистралям 23 и 15 и далее по магистрали 14 на вход насоса 8 и по магистрали 13 - в дополнительную полость 27. Избыток рабочей жидкости, обусловленный разными объемами поршневой 26 и штоковой 25 полостей гидроцилиндра, поступает в дополнительную полость 27, объем которой равен разности объемов поршневой и штоковой полостей гидроцилиндра. При достижении требуемой величины перемещения элементов стягиваемой конструкции или при достижении требуемого усилия стягивания рабочая операция прекращается. От перегрузки устройство предохраняется описанным методом.
Компенсатор 11 с упругим элементом 12 размещается в дополнительной полости 27 и служит для обеспечения надежной и безотказной работы гидравлического талрепа при любом его пространственном положении (горизонтальное, вертикальное, наклонное, вверх или вниз щтоком) путем исключения создания вакуума в дополнительной полости 27.
Повышается надежность работы устройства за счет введения в конструкцию талрепа дополнительной камеры с размещенным в ней компенсатором с упругим элементом, что обеспечивает надежность работы устройства в любом положении устройства (горизонтальном, вертикальном и т.д.), кроме того, наличие компенсатора с упругим элементом предотвращает образование вакуу.ма в дополнительной камере; конструктивные особенности устройства позволяют исполнить его в компактном виде, что позволяет использовать последнее в узких местах, в рабочих зонах ограниченного объема, т.е. расширяются функциональные возможности.
Формула изобретения
Гидравлический талреп, содержащий корпус, гидроцилиндр с поршнем и штоком и средства подачи рабочей среды, отличающийся тем, что, с целью повышения надежности работы и расширения функциональных возможностей, гидроцилиндр снабжен дополнительной камерой, в которой расположен компенсатор с упругим элементом, средства подачи рабочей среды выполнены в виде размещенных в корпусе гидроцилиндра ручного гидравлического насоса, двухпозиционного крана с рукояткой и предохранительного клапана, при этом двухпо- зиционный кран имеет два управляющих элемента, первый из которых трехходовой, второй - двухходовой, выход насоса соединен со входом трехходового управляющего элемента, первый выход трехходового управляющего элемента соединен со штоковой полостью гидроцилиндра, второй выход трехходового управляющего элемента соединен с поршневой полостью гидроцилиндра и со входом двухходового управляющего элемента, а выход двухходового управляющего элемента соединен со входом насоса и с дополнительной полостью гидроцилиндра.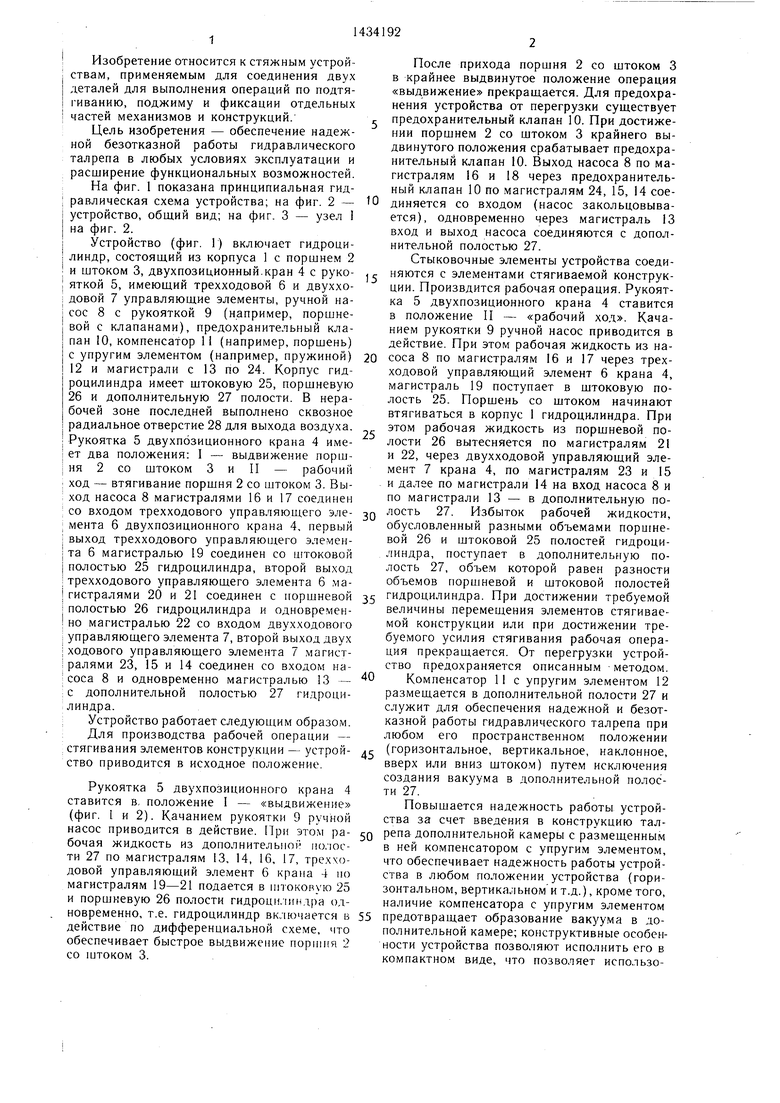

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| ГИДРОПРИВОД ПРЕССА С ДВУРУКИМ УПРАВЛЕНИЕМ | 2003 |
|
RU2240919C1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Гидравлический привод стрелового самоходного крана | 1976 |
|
SU660926A1 |
| Двухпоточный гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1330277A1 |
| Гидравлический пресс | 2019 |
|
RU2733234C1 |
| Система управления гидравлическим прессом | 1987 |
|
SU1479327A1 |
| Гидравлический привод штамповочного молота | 1989 |
|
SU1682024A1 |
Изобретение относится к стяжным устройствам, применяемым для соединения двух деталей для выполнения операций по лодтя- гиванию, поджиму и фиксации относительного положения отдельных частей механизмов и конструкций. Цель изобретения - обеспечение надежной работы талрепа в любых условиях эксплуатации и расширение функциональных возможностей. Устройство включает гидроцилиндр, состоящий из корпуса 1 с поршнем 2 и штоком 3, двух- позиционный кран 4 с рукояткой 5, имею- ший трехходовой 6 и двухходовой 7 управ- ляюшие элементы, ручной насос 8 с ртукоят- кой 9, предохранительный клапан 10, компенсатор 11 с упругим элементом 12 и магистрали с 13 по 24. Корпус 1 гидроцилиндра имеет штоковую 25, поршневую 26 и дополнительную 27 полости. Рукоятка 5 двухпозиционного крана 4 имеет два положения: 1 - «выдвижение поршня 2 со штоком 3 и П - «рабочий ход - втягивание поршня 2 со штоком 3. Выход насоса 8 магистралями 16 и 17 соединен со входом трехходового управляющего элемента 6, магистралью 19 соединен со што- ковой полостью 25 гидроцилиндра. Второй выход трехходового управляющего элемента 6 магистралями 20 и 21 соединен с поршневой полостью 26 гидроцилиндра и одновременно магистралью 22 со входом двухходового управляющего элемента 7, магистралями 23, 15 и 14 соединен со входом насоса 8 и одновременно магистралью 13 - с дополнительной полостью 27 гидроцилиндра. Указанная цель достигается за счет обеспечения надежной работы устройства при любом пространственном положении, а также за счет использования его в труднодоступных местах или ограниченных объемах вследствие расположения средств подачи рабочей среды непосредственно в корпусе гидроцилиндра. 3 ил. (Л со 4 ;о 
Фи.2
Фиг.
| Талреп гидравлический | 1974 |
|
SU485255A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
