ключены к выходу блока включения и .сброса, порогового элемента, вход которо -го соецикен с третьим выходом блока преобразования и элемента 2И, первый вход которого подключен к выходу порого вого элемента, второй вход - к инвероному выходу триггера запрета и к третьему входу блока синхронизации, а выход к R-входу триггера режима, выход которого связан с четвертым входом блока синхронизации, управляющим входом второго блсжа ключей.И вторым входом элемента 2И блока управления скорортью вращающейся, оптической системы, выход которого соединен с управляющим входом 1 499 ключей и с R-входом тригпервого блока гера сброса. 2.Устройство по п. 1, о т гт и ч а ю щ е е с я тем, что распре целите ль импульсов выполнен в виде двух элементов 2И и двух элементов 2ИЛИ, включеиных наВыходе соответствующих элементов 2И.. 3.Устройство по пп. 1 и 2, о т л нчающееся .тем, что блок преобразования выполнен в виде амплитудного детектора и лоследовательно соединенных лорогового элемента, вход которого соединен с входом амплитудного детектора, и двух ждущих мультивибраторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамической балансировки лучом лазера роторов | 1983 |
|
SU1130753A2 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1987 |
|
SU1434301A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Устройство для динамической балансировки роторов | 1984 |
|
SU1173214A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Устройство для коррекции дисбаланса коленчатого вала | 1986 |
|
SU1406456A1 |
1. УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛУЧОМ ЛАЗЕРА РОТОРОВ, имеющих собственный привод, содержащее основание, закреппе ные на нем подвес для установки ротора, расположенные соосно с ротором вращаюмлуюся оптическую систему с приводом и кор 1,ректирующий лазер.датчик опорного сигнала и датчики дисбаланса, связанные с подве- . сом, соединенный с датчиками блок измерения, датчик опорного сигнала враща. щейся оптической системы, последоватеп : Но соединенные блок преобразования, блок синхронизации, второй вход которого соединен с выходом датчика опорного сигнала вращающейся оптической системы, Ef бпо& управления,-второй, вход которого связав с вторым выходом блока преобразованвя, , а выход - с входом упргавлемия пазера, блок управления скоростью врашакшейся оптической системы, вход которого ПСА ктпочбн к выходу датчика опорного сигнала вращающейся оптической снстемы. источник переменного тока, первый блок ключей, вх(}ды которого соединены с ио- , точником переменного тока, а выходы с приводом вращающейся ситической системы, блок командных сигналов и второй блок ключей, входы которого соединены с источником переменного тока, а выходыс приводом ротора, отличающееся тем, что, с целью повышэния точнооти балансировки и производительности, блок управления скоростью вращающейся оптической системы вьшолнен в виде последовательно соединенных кварцевого генератора, трех делителей частоты, эле менга ЗИ-2ИЛИ и счетчика, друх регистi ров, информационные входы которых сое. динены с выходом счетчика, блока сравнения кодов, входы которого соединены с выходами регистров, распределителя импульсов, первый и второй входы которого подключены к инверсному выходу второго делителя частоты, третий и четвертый . входы - к выходу третьего делителя частоты, а выходы - к входам опроса регистров, элемента 2И, первый вход которого 4 оо подключен к выходу блока сравнения кодов, и трех последовательно.соединенных жду щих мультивибраторов, вход первого «з 4 CD СР которых и третий и четвертый входы эпе- , менга ЗИ-2ИЛИ соединены с выходом второго делителя частоты, а выход - с I пятым входом распределите 1я импульсов, выход третьего ждущего мультивибратора {подключен к входу сброса счетчика, ; первого, делителя частоты связан с пятым входом элемента ЗИ-2ИЛИ, шестой вход которого соединен с датчиком опорного сигнала вращающейся оптической свстемы, блок командных сигналов выпопнег в виде блока включения и сброса, т|эиггеров режима и запрета,5-входы которых под-/
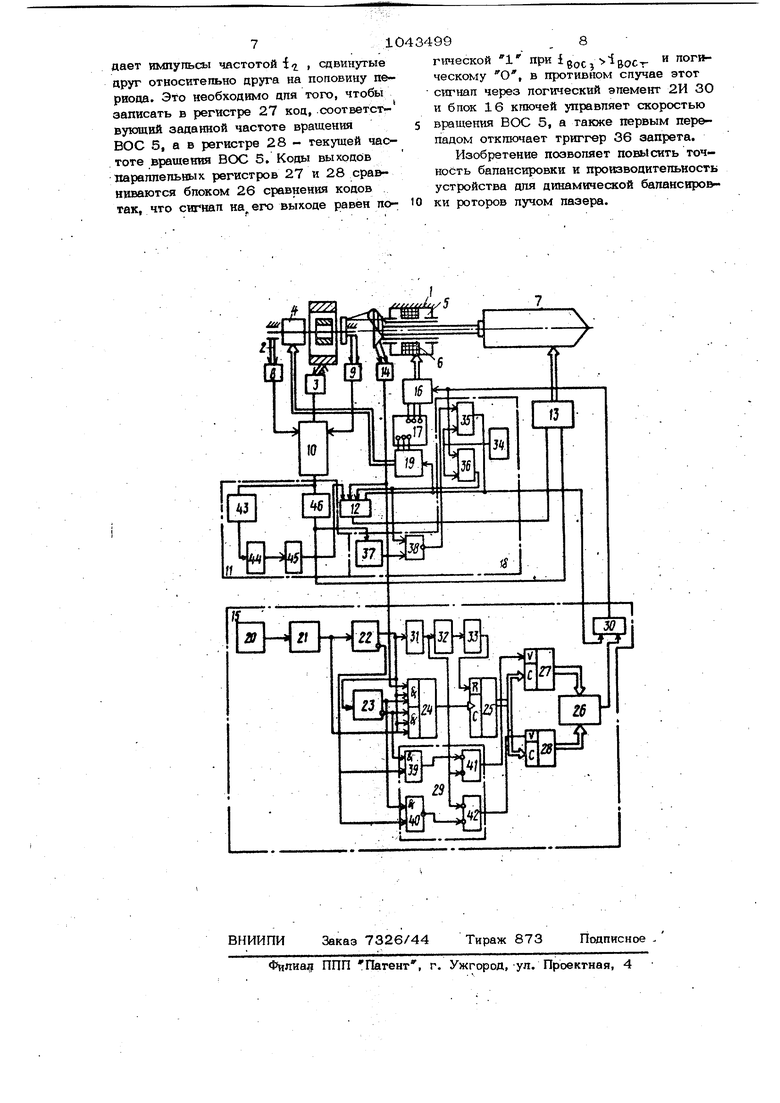
Иаобрзтенве относится к технологии приборостроения и может быть использовано для балансировки лучом лазера малогабаритных роторов, имекяцих собстве ный привод. Известно устройство для бапансировки пучом лазера, содержащее основание, закрехтенные на яем подвес для установки ротора, { спопоженные соосно с ротором вращающуюся -оптическую сиртему (БОС) с приводом и корректирующий лазер, датчик опорного сигнала, .блок из| ерения и блок управления ij . НедостаткамиТакого устройства являются неЗмлсокая точность балансировки и ограниченней производительность. Наиболее близким к изобретению по техшиеской сущности является устройство для динамической балансировки пучом лазера роторов, имеющих, собственный привод, содержащее основание, закреплен ные на нем подвес для установки ротора, устаж)вленные соосно с ротором вращаю1цуюся оптическую систему с тфиводом и корректирующий лазер, датчик опорного сигнала и датчики дисбаланса, связанные с подвесом, соединенный с датчиками блок измерения, датчик опорного сигнала вра. щающейся оптической системы, последовав тепьно соединенные блок преобразования, блок синхронизации, второй вход которого соединен с выходом датчика опорного сигнала вращающейся оптической системы и блок управления, второй . вход которог связан, с вторым выходом блока преобразования, а выход - с входом управления лазера, блок управления скьростью вращающейся оптической системы, вход которого подключен к выходу датчика опорного сигнала вращающейся оптической системы, источник переменного тока, блок ключей, входы которого соединены с источником переменного тока, а выходы с приводом вращающейся оптической сиотемы, блок командных сигналов и второй блок ключей, входы которого соединенны с источником переменного тока, а выходы - с приводом ротора 21 Недостатками известного устройства являются невысокая точность балансировки и ограниченная,производитепьно ть, обусловленная большим временем фазового совмещения объектива вращающейся oi тической системы и тяжелого места ротора, а также Срывами фазово.й синхронизации в условиях помех, Цель изобретения - повышение точности балансировки и производительности. Поставленная цель достигается тем, что в устройстве для динамической бала сировки лучом лазера роторов, имеющих собственны.й привод, содержащем основ ние, закрепленные на нем подвес цпя ; установки ротора, расположенные соосно , с ротором вращающуюся оптическую сие- ; тему с приводом и корректирующий лазер, датчик опорного сигнала и датчики дисбаланса, связанные с подвесом, соединенный с датчиками блок измерения, датчик опорного сигнала вращающейся оптичесжой системы, поспедоватепьно сое диненные блок преобразования, бпок синхронкзации, второй вход когорого оред нен с выходом датчика опорного сигналаt вращаюшейся оптической системы,и блок управления,второй вход которого связан с BTofft iM выходом блока преобразования, а выход - с входом управления лазера, бпо управления скоростью вращающейся оптической системы, вход которого подклк г чен к выходу датчика опорного сигнала вращающейся оптической системы, источник переменного тока, первый блок ключей, вх:оды которого соединены с источн ком переменного тока, а выходы - с приводом вращающейся оптической системы, бло командных сигналов . и второй блок ключей, входы которого соединены с источником переменного тока, а выходыс приводом ротора, блок управления скоростью вращающейся оптической системы выполнен в виде гюследовательно соединенных кварцевого генератора, трех делителей частоты, элемента ЗИ-2ИЛИ и сметчика, двух регистров, информационные входы которых соединены с выходом счет чика, блока сравнения кодов, входы которого соединены с выходами регистров, / распределителя импульсов, первый и вто рой входы которого подключены к инверо ному выходу второго делнтегю частоты, третий и четвертый входы - к выходу третьего делителя частоты,а выходы к входам опроса регистров, элемента 2И первый вход которого подключен к выходу блока сравнения кодов, и грех последо вательно соединенных ждущих мультивибраторов, вход первого из которых и третий и четвертый .ы элемента ЗИ2ИЛИ соединены с выходом второго де-. лителя частоты, а выход - с пятым входом распределителя импульсов, выход третьего ждущего мультивибратора подключен к входу сброса счетчика, шход первого делителя частоты связан с пятым входом элемента ЗИ-2ИЛИ, шестой вход которого соединен с датчиком опорного сигнала вращающейся оптической системы блок командных сигналов выполнен в виде блока, включения и сброса, триггеров режима и запрета, G -входы которых поВ- ключены к выходу блока включения в сброса, порогового элемента, вход которого соединен с третьим выходом блоки преобразования, и элемента 2И, первый . вход которого подключен к выходу поро гювого элемента, второй вход - к внвероному выходу триггера запрета и третьему входу блока синхронизации, а выход - к R-входу,-триггера режима, выход которогг связан с четвертым входом блока синхро низаиин, управляющим входом второго блока ключей и входом элемента 2И блока управления скоростью вращающейся оптической системы, выход которого соединен с управляющим входом первого блока ключей и с 1 -входом триггера сброса. .. Причем распределитель импульсов выполнен в виде двух элементов 2И и двух элементов 2ИЛИ, включенных на соответствующих элементов 2И. :. Кроме того, блок преобразования выполнен в виде амплитудного детектора и последовательно соединенных порогового элемента, - вход которого соединен с входом амплитудного детектора, и двух ждущих мультивибраторов. На чертеже приведена блок-схема предлагаемого устройства. Устройство содержит основание 1, подвес 2, в котором устанавливается ротор, датчик 3 опориых импульсов, привод 4 ротора, вращающуюся оптическую систему 5 (вое) с приводом б, лазер 7 датчики 8 и 9 дисбаланса, блсж Ю измерений, входы которого подключены к выходам датчиков 3, 8 и 9, последовательно соединенные блок управлення, бпок 12 синхронизацйи и блрк 13 управлення, выход которого соединен с лазером 7, д |тчик 14 опорного сигнала вращающейся оптической системы (вое), блок 15 управления скоростью вое, первый блок 16 ключей, источник 17 переменного тока, подключенный к блоку 16 ключей, блок 18 командных сигналов, второй блок 19 ключей, подключенный к источнику 17. Бпок 15 управления скоростью ВОС . выполнен в виде последовательно соединенных кварцевого генератора 2О, делителей 21. - 23 частоты, элемента 24 ЗИ- -2ИЛИ и счетчика 25, блока 26 сравнения кодов, регистров 27 н 28, входы которых подключены к выходу счетчдаш 25, а выходы - к входам блока 26 сравнения кодов, распределителя 29 импульсов, элемента ЗО 2И и последовательно со&диненных ждущих мультивибраторов 31 - 33. Блок. 18 командных сигналов выполнен в виде блока 34 включения и сброса, триггера 35 режима, триггера 36 запрета, выход котррого вбединен с третьим входом блсаш синкронвзации, порогового элемента 37 и элемента 38 2И. Распределитель 29 импульсов выполнен в вщхе элементов 2И 39 и 4О и элементов 2ИЛИ 41 и 42. Бпок 11 преобразования выполнен в виде поспедоватепьно соединенных порогового элемента 43, ждущих мультивибраторов 44 и 45 и амптгатудного детектора 46. Устройство работает следующим образом. Бапансируемый ротор устанавтшается в, подвесе 2 и подключается приводом 4 к бтюку 19 ктпочей. Нажимается кнопка блока 34 включения и сброса и импульс с его выхода задние фронтом устанавливает триггеры 35 и 36 в состояние .логической единицы. Сигнал логической единицы с ияхода триггера 35 режима включает блоки 16 и 19 ключей, через которые на приводы 4 и 6 ротора и вое 5 Свыходов источника 17 переменного тока начинают поступать переменные токи рабочей частоты. Балансируемый ротор и вое 5 начинают разгоняться. При выходе их на рабочие обороты, причем в сипу большей инерционности БОС 5 разгоняется медленнее, чем ротор, сигнал с блока 15 управления скоростью ВрС по входу 1 сбрасывает в начальное положение триггер 36 запрета сигнал с инверсного выхода которого /разрешает срабатывание блока 12 синхро низации и через второй логический элемент 38. JSH лодРотавливает возврат тригг-ера 35 режима по входу I, если дисбаланс ротора в плоскости коррекции не превышает поля допуска. В npotHBHOM случае осугцествляется цикл коррекции дисбаланса. Дисбалансы ротора -в плоскостях рекции воспринимаются датчиками 8 и 9 дисбаланса и преобразуются блоком 10 измерения в. два синусоидальных напряж«1ИЯ, первое вз которых характеризует величину и угол дисбаланса в одной, а второе - в другой плоскостях коррекции. Напряжение, характеризующее дисбалаке в треоуемой ппоскости коррекции, воспринимается бпоком 11 преобразования, где вз него с помощью пороговогчэ эпемента 43 и ждущих мультивибраторов 44 и 45 формируется строб тяжепого места, а с помощью амплитудного детектора 46, выделяется постоянное тапряжение, пропсфцйонапьное дисбатшнсу. Это Еапряжеяие управляет через бтюк 13 управпвния энергией импупьсов пазера 7, а также является опорным дпя пороговог эпемента 37, настроенного иа амплитуду срабатывания, пропорциональную остаточкому дисбатщнсу, и отключающего через второй погический эпемент - 2И 38 процесс бапанс фовки, если дисбаланса меньше доруска. Строб тяжелого места ротора сравнивается в блоке 12 синхронизации со стробом, снимаемым с датчика 14 опорного сигнала БОС 5, и при их совпадении (при условии включения триггера -35 режима и выключении триггера 36.запрета) инициируют запуск лазера7 через блок 13 управления. Лазернь й импульс производит коррекдшо неуравновешенной массы .и на поверхности ротора возникает спед в ввде глухого отверстия. Процесс автоматически повторяется до достижения дисбалансом поля допуска, после чего пороговый элемент 37 отключает триггер 35 режима, прекращается -. подача питающих напряжений на приводы 4 и 6 -ротора и 5, они. останавдиваю1тся, после чего ротор поворачивается и балансируется в другой плоскости. При работе схемы важным моментом, определяющим, частоту синхронизации совпадений положений тяжелого места ротора и фокуса объектива ВОС 5, а следовательно, и производительность балансировки, является обеспечение режима взаимного их проскальзывания с частотой 2-5 Гц, что обеспечивается характером, работы блока 15 управления скоростью еос5. При. работе блока 15 последовательность импульсов стабильной частоты с вь1х6да кварцевого генератора 20 делится делителями 21-23 частоты, соответстве но первым - до частоты i р балансировки, вторым - до частоты i « 0,5 Гц и . третим - до частоты i О,25 Гц. Ука занные напряжения и импульсы с иыхода датчика 14 опорного сигнала ВОС 5 ком мутируются логическим элементом 24 ЗИ-2ИЛИ в последовательность пачек импульсов длительностьюкаждая с 1 с и частотой г , содержащих: четная импульсы частотой вост нечетная частотой Ipoc вращения БОС 5, и несут информацию о текущем и заданном значениях частоты вращения ВОС S. Эти импульсы записываются двоичным счетч ком 25, предварительно сбрасываемым в нулевое положение импульсами частотой i с выхода третьего ждущего мульт вибратора 33. Параллельные коды, соответствующие ; заданной i goc i текущейfgoc частотам вращения ВОС 5, поспедоБатепьно записываются параллельными регистрами 27 и 28 импульсами с выходов распределт теля 29 импупьсов, причем последний выдает импупьсы частотой i.i , сдвинутые друг относитепьно друга на поповииу периода. Это необходимо дпя того, чтобы записать в регистре 27 код, .соответствующий заданной частоте вращения вое 5, а в регистре 28 - текущей частоте вращения ВОС 5. Коды выходов тшраппепьных регистров 27 и 28 сравниваются блоком 26 сравнения кодов так, что сигнал нашего выходе равен поJOf1 99 8 P«isoCi i гической и логическому О, в противном случае этот сигнал через логический элемент 2И 30 и блок 16 кгаочей управляет скоростью вращения ВОС 5, а также первым пер&падом отключает триггер 36 запрета. Изобретение позволяет повысить точность балансировки и производительность устройства для динамической багюнсиро&ки роторов лучом лазера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Радиостанция | 1988 |
|
SU1589411A2 |
| 0,01 М 1/22 | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Скворчевский А.К | |||
| и др | |||
| Автоматические балансировочные станки с.исполь зованнем лазеров непрерывного действия | |||
| Механизация и автоматизация производства, 1978, № 5, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
