О
Изобретение относится к электро- технике и может быть использовано в электроприводе с регулированием частоты вращения.
Цель изобретения - расширение диапазона регулирования частоты вращения, повьшение точности и,быстродействия.
На чертеже приведена блок-схема устройства для ре гулирования частоты вращения и крутящего момента асин- xjpoHHoro двигателя.
Устройство содержит блок 1 вращения вектора напряжения, выходы кото- роге подключены к асинхронному двигателю 2 через усилители 3.1 и 3.2 мощности. Входы блока вращения вектора напряжения подключены к блоку 4 задания магнитного потока и блоку 5 зада- ния частоты вращения, а вторые два входа соединены с выходами генератора 6 частоты, который генерирует сигналы sinuJit и costu,t, где ои, - частота напряжения питания. Вход генератора частоты соединен с блоком 7 суммирования. Входы последнего подключены соответственно через масштабирующий блок 8 с коэффициентом масштабирова™
R о-.
ния с блоком 5 задания час . ы .Kg-t-K ;
тоты вращения и через масштабирующий блок 9 с коэффициентом масштабироваRS4 л
ния тахогенератором Ш,
LI(Rs-fRp)
где Iv о и RS - активные сопротивления обмоток соответственно ротора и статора, причем RU приведено к статор- ной обмотке; L - индуктивность намагничивающего контура; I U намаг- ничивания. . ,
Устройство работает следующим образом.
Блок А задания потока формирует постоянный сигнал Srj, а блок 5 задания частоты вращения - постоянный сигнал, определяемый выражением
S,R5lR+4LlL (
Из векторной диаграммы асинхронного двигателя следует, что
LO,LI,ERIR+U, (2)
где W, - частота поля статора;
и - сигнал, пропорциональньм ЭДС ротора, которьш находится путем умножения сигнала т.а- хогенератора 10 на постоянный коэффициент.
Из вьфажений (1). и (2) находим
., оEJ +IT- ((Rs+RR) -LI(RS+RR)
.Уравнение (3) решается в блоках 7, 8 и 9.
Система управления двигателем 2 регулирует фактически частоту поля статора.
, Сигнал S является фактическим управляющим сигналом. Частота осциллятора автоматически прилаживается к рабочим условиям двигателя таким образом., что получаем постоянное магнитное поле статора. Возрастание нагрузки на двигатель приводит к уменьшению частоты осциллятора со,- Управляющий сигнал S регулирует работу асинхронного двигателя 2 таким же образом, как двигатель постоянного тока управляется напряжением ротора. Любой внешний регулирующий контур, например регулирование скорости или позиционное регулирование, может быть подключен обычным путем к входу сигнала .
При регулировании работы двигателей постоянного тока принято регулировать силу магнитного поля, а также ток ротора в зависимости от рабочих условий. Например, ослабление поля применяется для работы двигателя на повышенных скоростях. Все такие способы регулирования оказываются возможными для асинхронного двигателя в случае применения системы регулирования, выполненной в соответствии с изобретением. Это можно сделать путем изменения необходимых параметров в вычисляющих схемах системы регулирования. -.
Системы регулирования по изобретению могут быть осуществлены с аналоговыми и цифровыми компонентами, например с микрокомпьютером. В пределах объема изобретения находится еще возможность (особенно в цифровых конструкциях) записать альтернативные .математические формулы для расчетов, выполняемых системами регулирования.
Данное изобретение относится к двухфазному двигателю.. Путем обычных тригонометрических преобразований координат система может быть переделана для регулирования двигателя с любым количеством фаз. Например, два управляющих сигнала V и из выхода решающего прибора могут быть легко преобразованы в трехфазные сиг налы.
Во время работы двигателя в результате его нагревания особенно из- -меняется его сопротивление из меди. Технически не трудно измерить темпе- ратуру и сопротивление обмоток двигателя и при помопщ этих замеренных величин отрегулировать параметры сопротивления в вычисляющих схемах, с тем чтобы добиться оптимального регули- рования при всех температурах.
Сигнал тахогенератора, который применяется в системе регулирования по изобретению, может быть получен непосредственно от фактического тахогенератора, соединенного с валом двигателя. Возможно также получить сигнал о частоте вращения косвенно, так называемую восстановленную величину например, путем дифференцирования за- меренной величины угла вала двигателя.
Обычно этот тип .системы регулирования применяется для регулирования частоты вращения двигателя, однако можно регулировать И другие величины, такие как крутящий момент двигателя и положение двигателя.
Формула изобретения
Устройство для регулирования частоты вращения и крутящего мойента асинхронного двигателя, содержащее блок вращения вектора напряжения, выходы которого предназначены для
подсоединения через усилители мощности к фазовым обмоткам асинхронного двигателя, первые два входа блока вращения вектора напряжения подсоединены к блокам задания магнитного потока и частоты вращения соответственно, а вторые два входа соединены с выходами генератора частоты, который генерирует сигналы sinw,t и cosoJ t, причем вход генератора частоты соеди- нен с блоком задания частоты вращения блок суммирования и тахогенератор, отличающееся тем, что, с целью расширения диапазона регулирования частоты вращения, повышения точности и быстродействия, введены два масштабирующих блокас коэффициентами масштабирования соответствен«° Li-cl r,) « Lf-jIsTrj Р«
вход первого из масштабирующих блоков соединен с вькодом блока задания частоты вращения, вход второго масштабирующего блока соединен с.тахогене- ратором, а их выходы соединены с блоком суммирования, выход которого является входом генератора частоты, где Со, частота, поступающая на статор асинхронного двигателя; RR и RJ - активные сопротивления обмоток соответственно ротора и статора, причем Кд приведено к статорной обмотке; L - индуктивность намагничивающего контура, а I ц - ток намагничивания .
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1977 |
|
SU1371513A3 |
| Устройство для регулирования числа оборотов асинхронного двигателя | 1977 |
|
SU871746A3 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПОТОКОСЦЕПЛЕНИЯ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ В СОСТАВЕ ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ ПОЛЕОРИЕНТИРОВАННЫМ УПРАВЛЕНИЕМ ПРИ РАБОТЕ В ЗОНЕ ОГРАНИЧЕННОГО НАПРЯЖЕНИЯ | 2021 |
|
RU2759558C1 |
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
Изобретение относится к электротехнике. Цель изобретения - расши1ре- йие диапазона регулирования частоты вращения, повышение точности и быстродействия. Указанная цель достигается тем, что в устройство для регу- J|иpoвaния частоты вращения и крутящего момента введены масштабирующие блоки 8 и 9, выходами подключенные к входам блока 7 суммирования. Вход блока 8 подключен к выходу блока 5 задания частоты вращения, а вход блока .9 - к выходу тахогенератора 10. В результате обеспечивается регулирование асинхронного двигателя по методу ослабления поля путем изменения параметров блоков 8, 9 и 7. 1 ил. СО 2 il; со СП О 4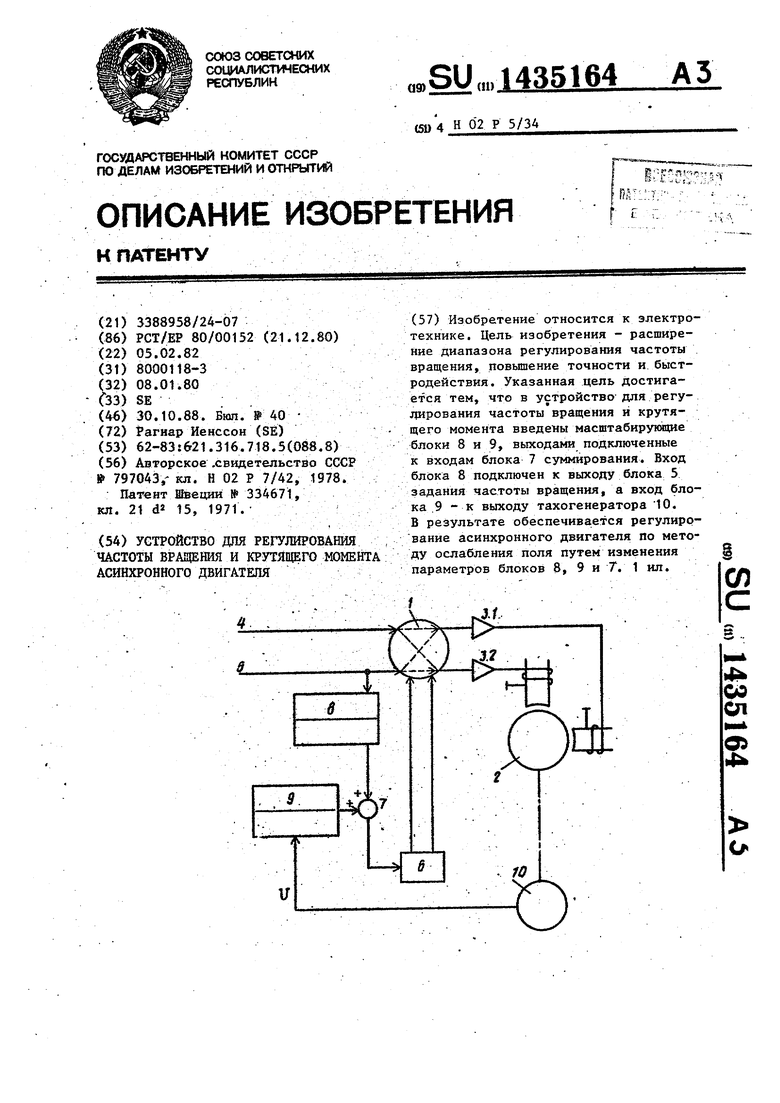
| Электропривод | 1978 |
|
SU797043A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU334671A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
