Настоящее изобретение относится к области электротехники, в частности к системе векторного полеориентированного управления электроприводом на базе асинхронного двигателя с короткозамкнутым ротором, и может быть использовано в системах управления асинхронными электроприводами транспортных средств.
Асинхронные электроприводы с векторным управлением условно можно разделить на два типа. К первому типу относятся электроприводы тех механизмов, где потокосцепление ротора поддерживается на заданном постоянном, как правило, номинальном уровне. Второй тип - это электроприводы, в которых необходимо формировать сигнал потокосцепления ротора по некоторому закону с целью решения задач оптимизации по какому-либо из критериев.
Так, например, в тяговых электроприводах транспортных средств с векторным управлением актуален вопрос энергетической эффективности, поэтому в алгоритмах управления такими приводами потокосцепление ротора (или потокообразующий ток статора) формируется так, чтобы обеспечивался максимальный КПД (стратегия управления Maximum Efficiency или ME) или обеспечивался минимум статорного тока при заданном моменте (стратегия управления Maximum Torque Per Ampere или МТРА).
Однако оптимальность по тому или иному критерию достигается лишь в тех режимах, пока не вступают в работу дополнительные ограничения, связанные, как привило, с условиями максимально допустимого напряжения или тока.
Известно, что напряжение статора асинхронного двигателя достаточно сильно зависит от других величин, в наибольшей степени - от потокосцепления и электрической частоты, с ростом которых напряжение на зажимах статора также возрастает.
Обычно при превышении частотой вращения своего номинального значения, т.е. при переходе во вторую зону, напряжение статора также возрастает выше номинального значения. При этом очень важно, чтобы оно не превысило максимально допустимый уровень, который определяется величиной напряжения звена постоянного тока (ЗПТ) и коэффициентом запаса по напряжению. Таким образом, связь линейного напряжения статора с напряжением ЗПТ определяется выражением (1).

где U л - линейное напряжение, UDC - напряжение в звене постоянного тока.
Как правило, коэффициент запаса Kзап составляет около 0,15…0,25 и необходим для обеспечения запаса на регулирование по напряжению.
В настоящее время в открытых источника информации достаточно подробно рассмотрены вопросы построения систем векторного полеориентированного управления асинхронным электроприводом. Однако при этом акцент сосредоточен на общем случае синтеза контуров регулирования скорости и потокосцепления при однозонном или двухзонном регулировании [1, 2].
Подробно рассмотрены вопросы формирования законов управления потокосцеплением при векторном управлении в источнике [3], в том числе и для задач оптимизации по некоторым из критериев.
В книге [4] описан способ регулирования потокообразующей составляющей тока статора, которая в статическом режиме пропорциональна потокосцеплению ротора через параметр взаимной индуктивности статора и ротора. При этом регулирование производится посредством введения контура регулирования ЭДС асинхронного двигателя, структурная схема и рекомендации к синтезу которого приведены в источнике [4]. Однако такой способ связан с рядом допущений, которые являются справедливыми лишь в ограниченном диапазоне частоты вращения.
Именно поэтому актуальна задача синтеза такого способа управления потокосцеплением ротора (или потокообразующей составляющей тока статора), при котором бы достигалось поддержание напряжения двигателя во всем диапазоне изменения частоты вращения.
Технический результат, на достижение которого направлено предлагаемое техническое решение, заключается повышении энергетических показателей работы асинхронного электропривода с векторным полеориентированным управлением при работе в области ограничения статорного напряжения и в зоне высоких частот вращения электродвигателя.
Заявленный технический результат достигается путем создания способа формирования потокосцепления ротора асинхронного двигателя с короткозамкнутым ротором в составе электропривода с векторным полеориентрированным управлением для квазистатического режима работы заключающегося в том, что обеспечивают создание сигнала заданного момента Mref, посредством которого формируют зависимость потокосцепления ротора от заданного момента Mref для определения значения потокосцепления ротора при заданном моменте  одновременно осуществляют вычисление максимального потокосцепления
одновременно осуществляют вычисление максимального потокосцепления  которым по достижению напряжением статора заданного значения
которым по достижению напряжением статора заданного значения  ограничивают значение потокосцепления
ограничивают значение потокосцепления  ротора при заданном моменте и формируют сигнал потокосцепления ψref, далее определяют граничную угловую частоту вращения ωPmax ротора, причем если угловая частота ротора ω≤ωPmax, то формируют сигнал заданного потокосцепления, который соответствует сигналу потокосцепления ψref, при этом, как только угловая частота превышает граничное значение ω>ωPmax, формируют сигнал задания по потокосцеплению
ротора при заданном моменте и формируют сигнал потокосцепления ψref, далее определяют граничную угловую частоту вращения ωPmax ротора, причем если угловая частота ротора ω≤ωPmax, то формируют сигнал заданного потокосцепления, который соответствует сигналу потокосцепления ψref, при этом, как только угловая частота превышает граничное значение ω>ωPmax, формируют сигнал задания по потокосцеплению  ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора
ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора  далее формируют результирующий сигнал заданного потокосцепления
далее формируют результирующий сигнал заданного потокосцепления  ротора асинхронного двигателя, значение которого при ω≤ωPmax соответствует сигналу заданного потокосцепления ψref для зоны ограниченного напряжения, а при ω>ωPmax значению сигнала задания по потокосцеплению
ротора асинхронного двигателя, значение которого при ω≤ωPmax соответствует сигналу заданного потокосцепления ψref для зоны ограниченного напряжения, а при ω>ωPmax значению сигнала задания по потокосцеплению  ротора в зоне снижения мощности. Совокупность всех указанных выше признаков направлена на повышение энергетических показателей работы асинхронного электропривода с векторным полеориентированным управлением при работе в области ограничения статорного напряжения и в зоне высоких частот вращения двигателя.
ротора в зоне снижения мощности. Совокупность всех указанных выше признаков направлена на повышение энергетических показателей работы асинхронного электропривода с векторным полеориентированным управлением при работе в области ограничения статорного напряжения и в зоне высоких частот вращения двигателя.
Краткое описание чертежей
Фиг. 1. Графики зависимости линейного статорного напряжения от тока Id при разных частотах вращения.
Фиг. 2. Структурная схема блока формирования заданного потокосцепления при работе в зоне ограничения.
Фиг. 3. Блок формирования моментообразующей составляющей тока статора.
Фиг. 4. Функциональная схема асинхронного электропривода с векторным управлением.
Фиг. 5. Переходные процессы при разгоне тепловоза до 41 км/ч.
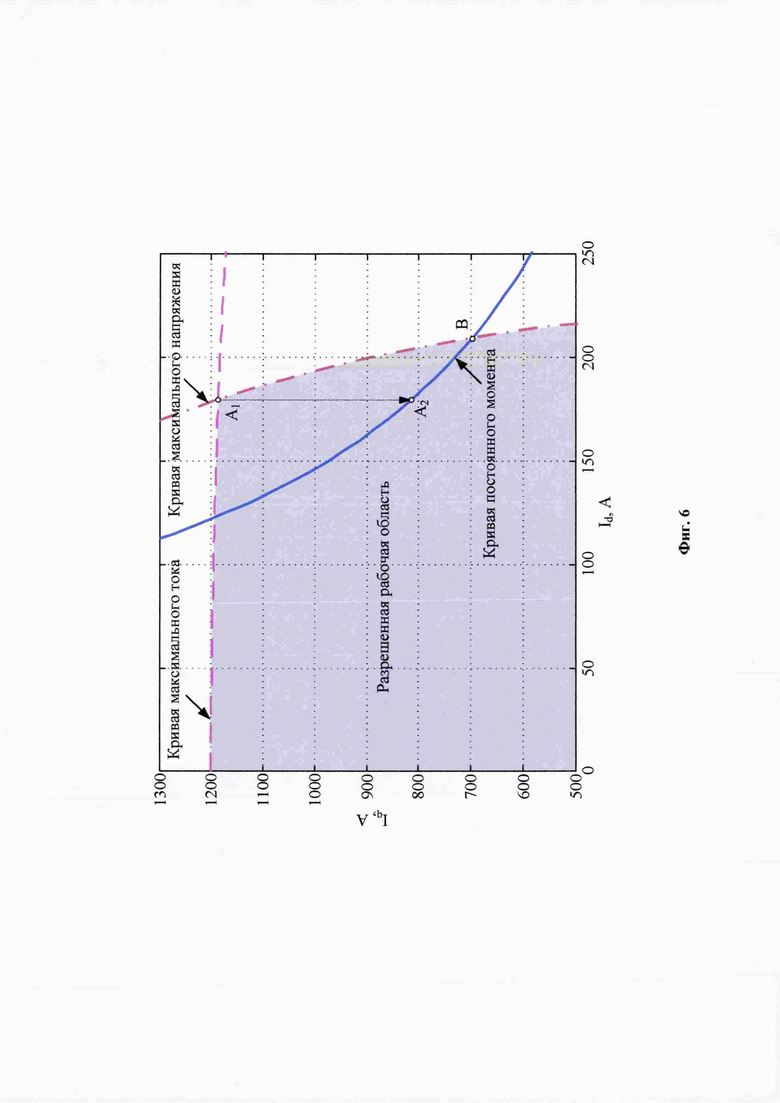
Фиг. 6. Иллюстрация на плоскости "Id-Iq" выбора рабочей точки при разных подходах формирования потокообразующей составляющей тока статора на частоте вращения 500 об/мин.
Сущность заявленного способа заключается в получении оптимального электрического сигнала, позволяющего формировать необходимое потокосцепление ротора асинхронного двигателя в условиях ограниченного напряжения.
Для этого следует получить аналитическое выражение, связывающее потокосцепление ротора (или потокообразующую составляющую тока статора), максимальное напряжение статора, частоту вращения и заданный момент.
Воспользуемся математическим описанием системой дифференциальгных уравнений асинхронного двигателя с короткозамкнутым ротором для задач векторного управления. Известно, что в этом случае составляющие напряжения статора АД по осям d, q определяются системой уравнений Парка-Горева в ортогональной системе координат, ориентированной по вектору потокосцепления ротора:

где Ud, Uq, Id, Iq - напряжения и токи статора по осям d и q соответственно, Rs, Rr, Ls, Lr - активные сопротивления и полные индуктивности статора и ротора соответственно, Lm - взаимная индуктивность статора и ротора,  - коэффициент рассеяния, Tr=Lr/Rr - постоянная времени роторной цепи, Zp - число пар полюсов, ωэл=zpω - электрическая угловая частота вращения ротора.
- коэффициент рассеяния, Tr=Lr/Rr - постоянная времени роторной цепи, Zp - число пар полюсов, ωэл=zpω - электрическая угловая частота вращения ротора.
В квазистатическом режиме работы, когда скорости изменения токов и потокосцепления малы, и производными этих величин можно пренебречь, потокосцепление ротора можно определить, выразив его из третьего уравнения системы (2). Тогда первые два уравнения системы (2) преобразуются к виду:

В системе (3) можно пренебречь падением напряжения на активном сопротивлении статора, поскольку его величина намного меньше величины противо-ЭДС вращения. Кроме того, частота вращения вектора потокосцепления ротора, описываемая четвертым уравнением системы (2) может быть заменена электрической частотой вращения ротора, поскольку величина частоты скольжения также относительно мала. Тогда система (3) преобразуется к виду:

При этом амплитуда напряжения статора с учетом выражения (4) будет рассчитываться по формуле

В некоторых источниках напряжение статора асинхронного двигателя упрощенно представляют как ЭДС вращения от произведения магнитного потока на электрическую частоту вращения.
Применительно к рассматриваемому вопросу вышесказанное означает, что при оценке статорного напряжения будет учитываться лишь второе уравнение системы (4), в предположении, что в первом уравнении присутствует коэффициент рассеяния в качестве множителя, который, как правило, достаточно мал по величине. Иными словами, в выражении (5) Ud будет вносить существенно меньший вклад по сравнению с Uq.
Однако такой подход не является корректным в полной мере, поскольку с повышением частоты вращения для поддержания заданной мощности, ток Id следует снижать, и, соответственно, повышать ток Iq. Это будет приводить к тому, что составляющая статорного напряжения Ud будет все более возрастать, a Uq снижаться, следовательно, пренебрегать вкладом Ud в полное статорное напряжение будет некорректно.
Проведем сравнительный анализ разных способов оценки статорного напряжения на примере тягового асинхронного двигателя с векторным управлением, используя параметры его обмоток (табл. 1).

Построим графики зависимости линейного напряжения статора от тока Id (фиг. 1) при заданной механической мощности 320 кВт и частотах вращения 300, 400, 500, 600 мин-1 для трех случаев расчета статорного напряжения:
1. С использованием полного математического описания АД в статическом режиме по системе уравнений (2);
2. С использованием выражения (5);
3. С использованием только второго уравнения системы (4).
В данных уравнениях моментообразующую составляющую тока статора рассчитаем из выражения момента в статике:

Момент в формуле (6) рассчитывается, как М=Р/ω.
Из анализа графика (фиг. 1) следует, что расчет напряжения по выражению (5) достаточно точно аппроксимирует реальную зависимость, описываемую системой (2) в статическом режиме работы.
Если же напряжение рассчитывается только по второму уравнению системы (4), точность такого расчета снижается с ростом частоты, что видно из приведенных графиков.
Отсюда следует, что при синтезе алгоритма векторного управления АД более целесообразно пользоваться выражением (5), что позволяет более точно рассчитывать напряжение статора во всем диапазоне частот.
Так, используя формулу (5), выразим Id через все прочие величины, что позволит получить выражение заданного потокообразующего статорного тока, обеспечивающего поддержание заданного максимального напряжения статора:

Однако уравнение (7) не подходит для практического применения, поскольку включает компоненту тока Iq. В работах [5-6] представлен вариант формирования потокообразующей составляющей тока при условии ограничения полного тока статора. При этом составляющая Iq выражается как заданная величина из полного максимального тока и составляющей Id:

После этого выражение (8) подставляется в (7):

При таком подходе подразумевается, что электропривод работает не только при максимально возможном напряжении, но и при максимальном токе. Это означает, что соотношение между моментообразующей и потокообразующей составляющих тока при заданном моменте смещается в сторону увеличения Iq и уменьшения Id. Наглядно это показано в приложении 1. В свою очередь, такой способ формирования тока Id обуславливает уход от оптимума по КПД или статорному току.
Поэтому для получения более приближенного к оптимуму соотношения составляющих Id и Iq, следует в выражении (9) выразить Iq через крутящий момент:

Подставив (10) в (5) и возведя обе части уравнения (5) в квадрат, получим:

Перенеся все слагаемые в одну сторону, а также выполнив некоторые преобразования, получим биквадратное уравнение:

Уравнение (12) имеет четыре корня, два из которых будут отрицательными, следовательно, не имеющие практического смысла. Оставшиеся два корня будут положительными.
Меньший из двух оставшихся корней также непригоден на практике, поскольку обуславливает слишком большие значения статорного тока, превышающие максимально допустимые токи силового преобразователя и двигателя. Поэтому для задач управления АД следует применять выражение, являющееся наибольшим положительным корнем уравнения (12), умножив правую сторону на индуктивность Lm:

Данное выражение применимо для формирования потокообразующей составляющей тока статора, как во второй, так и третьей зонах. Однако в третьей зоне максимально возможная реализуемая мощность падает по мере роста частоты вращения.
Очевидно, максимальная мощность достигается в случаях, когда значение «внутреннего» корня в числителе становится равным нулю в (13). При переходе в третью зону потокосцепление следует находить по выражению, как это показано в работах [5, 6]:

Граничная частота, при которой АД будет работать с максимальной мощностью при ограниченном напряжении, может быть найдена путем приравнивания к нулю подкоренного выражения внутреннего корня выражения (13), а затем решения полученного уравнения относительно частоты:

Ниже представлен пример реализации заявленного способа с учетом формирования заданного потокосцепления ротора.
Структурная схема блока формирования заданного потокосцепления (БЗП) при работе в зоне ограничения показана на фиг. 2.
Сигнал заданного момента Mref поступает на блок первичного формирования заданного потокосцепления 1, в котором заложена зависимость оптимального потокосцепления ротора от заданного момента в первой зоне, которая формируется либо в табличном виде, либо в виде аналитического выражения. Применение такого подхода позволяет добиться минимизации статорного тока либо максимизации КПД при заданном крутящем моменте в зоне, где напряжение статора не достигло уровня своего ограничения. Более подробно данные вопросы рассмотрены в источниках [7-11].
Одновременно в блоке 2 вычисляется максимальное потокосцепление  по формуле (13), которое при достижении напряжением статора некоторого заданного значения, начинает ограничивать выходной сигнал
по формуле (13), которое при достижении напряжением статора некоторого заданного значения, начинает ограничивать выходной сигнал  блока 1 посредством блока ограничения 3 для формирования сигнала потокосцепления ψref с учетом ограничения.
блока 1 посредством блока ограничения 3 для формирования сигнала потокосцепления ψref с учетом ограничения.
Посредством блока 4 по формуле (15) рассчитывается граничная частота, при достижении которой необходимо снижать мощность. Для этого, посредством блока сравнения 5, определяется факт достижения частотой указанного значения. При этом блок 6 формирует сигнал задания по потокосцеплению ротора  в зоне снижения мощности по формуле (13).
в зоне снижения мощности по формуле (13).
Так, в диапазоне ω≤ωPmax выходной логический сигнал блока 5 будет равен "1", и посредством блока умножения 8, будет сформирован соответствующий сигнал заданного потокосцепления ψref только для зоны ограниченного напряжения.
Как только частота превышает граничное значение ω>ωPmax, выходной сигнал блока 5 становится равным "0" и посредством блока инвертирования 7 становится равным "1", умножаясь далее с помощью блока умножения 9 на выходной сигнал блока 6, т.е. формируют сигнал задания по потокосцеплению  ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора
ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора 
Выходные сигналы блоков 8 и 9 поступают на блок суммирования 10, выход которого представляет собой результирующий сигнал заданного потокосцепления ротора асинхронного двигателя.
Рассмотрим вариант построения системы ВУ электропривода с асинхронным короткозамкнутым двигателем, в которой применен предложенный способ формирования потокосцепления ротора.
Функциональная схема такой системы изображена на фиг. 4 и содержит такие основные элементы, как асинхронный двигатель с короткозамкнутым ротором (АД), силовой преобразователь (СП), датчик скорости (ДС), датчики токов (ДТ), датчик напряжения звена постоянного тока (ДН), а также контроллер, на который возложена функция реализации алгоритма векторного управления.
На вход контроллера поступают сигнал заданного момента в качестве управляющего воздействия, а также сигналы обратных связей от датчиков тока, напряжения и частоты вращения. На выходе контроллера формируется 6 сигналов управления ключами силового преобразователя.
Структура системы векторного управления включает в себя следующие блоки:
- блок формирования широтно-импульсной модуляции (ШИМ);
- преобразователи координат, реализующие переход из трехфазной неподвижной системы координат ABC в ортогональную вращающуюся систему координат в прямом и обратном направлении (ПК3-2,АВС-dq, nK2-3,dq-ABC);
- регуляторы потокообразующей и моментообразующей составляющих тока статора (РПТ, РМТ);
- блок компенсации перекрестных связей (БКПС);
- регулятор потокосцепления ротора (РП);
- блок формирования и ограничения заданных значений момента и моментообразующего тока (БЗМТ);
- блок идентификации параметров вектора потокосцепления ротора (БИП);
- блок задания потокосцепления ротора (БЗП).
Отметим, что такие блоки как ШИМ, ПК3-2, ПК2-3, РПТ, РМТ, РП, БКПС (опционально) составляют базовую (классическую) структуру при построении систем векторного управления, и всегда обязательно в ней присутствуют. Такая базовая структура широко используется сегодня в электроприводах различных механизмов и достаточно подробно описана в литературе, например в [1, 2, 3, 4].
Блок БИП, выполняющий идентификацию модуля и угла поворота вектора потокосцепления ротора также все чаще фигурирует в современных источниках информации в структуре систем ВУ электроприводов как обязательный элемент, поскольку в современных векторно-регулируемых приводах не применяются датчики непосредственного измерения потока ротора. Эту функцию берут на себя идентификаторы и наблюдатели потокосцепления, базирующиеся на том или ином принципе.
В данном варианте предлагается использовать идентификатор на основе математического описания АД в системе координат d,q, а именно - на основе системы уравнений (2). Этот способ идентификации описан в информационном источнике [2]. Могут также применяться любые другие способы идентификации.
Все прочие блоки чаще всего не являются обязательными. В данной структуре они предназначены для формирования заданных сигналов момента, потокосцепления и токов по осям d и q, и их ограничения. Такая структура хорошо подходит для управления тяговым электроприводом.
В данной структуре БЗМТ играет роль формирователя и ограничителя задания моментообразующего тока, а также ограничителя заданного момента по максимальной мощности во второй зоне и по максимальному току. При этом ограничение заданного момента выполняется в соответствие с выражениями:


Здесь ограниченный моментообразующий ток рассчитывается по выражению (8).
Структурная схема блока формирования и ограничения заданных значений момента и моментообразующего тока показана на фиг. 3.
Блок БЗП выполняет функцию формирования заданного потокосцепления ротора в соответствие с описанным в данной работе способом. Выше приведен принцип его работы со ссылкой на структурную схему (фиг. 2).
Далее проанализируем переходные процессы в электроприводе при моделировании программными средствами разгона тепловоза ТЭМ-6м, имеющего электромеханическую трансмиссию, построенную на базе асинхронного тягового электропривода, с учетом описанного способа формирования потокосцепления ротора (фиг. 5).
При этом показан процесс разгона от нуля до частоты вращения ТАД 876 мин-1). На графике (фиг. 5) можно выделить четыре участка.
На первом участке разгона наблюдается нарастание потокосцепления ротора, ток Id находится в ограничении. ТАД трогается с места и начинает разгон при максимальном моменте 22,8 кН⋅м.
На втором участке потокосцепление снижается, поскольку вступает в работу блок формирования заданного потокосцепления в зависимости от заданного момента, обеспечивая максимальный КПД.
Третий участок разгона тепловоза характерен переходом привода в зону ограничения по напряжению статора, которое прекращает возрастание при достижении уровня 0,85UDC=637,5 В, что обеспечивается за счет снижения потокосцепления ротора по заложенному в алгоритм закону. Из графика также видно, что переход в зону ограниченного напряжения практически совпадает по времени с попаданием во вторую зону, или зону постоянства мощности.
Четвертый участок разгона - это работа привода в третьей зоне, или зоне снижения мощности, которое необходимо для поддержания напряжения на заданном уровне.
Отметим, что использование предложенного способа формирования потокосцепления позволяет обеспечивать устойчивый запас по напряжению во всем диапазоне изменения скорости (т.е. в первой, второй и третьей зонах).
Список используемых источников информации:
1. Козярук А.Е. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов / А.Е. Козярук, В.В. Рудаков. - СПб.: Санкт-Петербургская Электротехническая компания, 2004. - 127 с.
2. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учеб. для вузов. - М.: Академия, 2006. - 272 с.
3. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. - Екатеринбург, Уральское отделение РАН, 2000. - 654 с.
4. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. - 320 с.
5. Nguyen-Thac, K. et al. "Comparative analysis of the chosen field-weakening methods for the Direct Rotor Flux Oriented Control drive system." Archives of Electrical Engineering 61 (2012): 443-454.
6. S. Kim, S. Sul and M. Park, "Maximum torque control of an induction machine in the field weakening region," Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, Ontario, Canada, 1993, pp. 401-407 vol. 1.
7. C. Kwon, "An Adaptive Maximum Torque Per Amp Control Strategy," IEEE International Conference on Electric Machines and Drives, 2005., San Antonio, TX, 2005, pp. 783-788.
8. C. Kwon, "Performance of Adaptive MTPA Torque Per Amp Control at Multiple Operating Points for Induction Motor Drives," IECON 2018 - 44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, 2018, pp. 637-641.
9. S. Kim, S. Sul and M. Park, "Maximum torque control of an induction machine in the field weakening region," Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, Ontario, Canada, 1993, pp. 401-407 vol. 1.
10. Sang-Hoon Kim and Seung-Ki Sul, "Maximum torque control of an induction machine in the field weakening region," in IEEE Transactions on Industry Applications, vol. 31, no. 4, pp. 787-794, July-Aug. 1995.
11. Lu Xianliang and Wu Hanguang, "Maximum efficiency control strategy for induction machine," ICEMS'2001. Proceedings of the Fifth International Conference on Electrical Machines and Systems (IEEE Cat. No.01EX501), Shenyang, China, 2001, pp. 98-101 vol. 1.


Изобретение относится к области электротехники, в частности к системе векторного полеориентированного управления электроприводом на базе асинхронного двигателя с короткозамкнутым ротором. Технический результат заключается в повышении энергетических показателей работы асинхронного электропривода с векторным полеориентированным управлением при работе в области ограничения статорного напряжения и в области высоких частот вращения двигателя. Способ формирования потокосцепления ротора асинхронного двигателя с короткозамкнутым ротором в составе электропривода с векторным полеориентрированным управлением для статического режима работы заключается в том, что обеспечивают создание сигнала заданного момента Mref, посредством которого формируют зависимость потокосцепления ротора от заданного момента Mref для определения значения потокосцепления ротора при заданном моменте  . Одновременно осуществляют вычисление максимального потокосцепления
. Одновременно осуществляют вычисление максимального потокосцепления  которым по достижению напряжением статора заданного значения
которым по достижению напряжением статора заданного значения  ограничивают значение потокосцепления
ограничивают значение потокосцепления  ротора при заданном моменте и формируют сигнал потокосцепления ψref. Далее определяют граничную угловую частоту вращения ωPmax ротора. Если угловая частота ротора ω≤ωPmax, то формируют сигнал заданного потокосцепления, который соответствует сигналу потокосцепления ψref. Как только угловая частота превышает граничное значение ω>ωPmax, формируют сигнал задания по потокосцеплению
ротора при заданном моменте и формируют сигнал потокосцепления ψref. Далее определяют граничную угловую частоту вращения ωPmax ротора. Если угловая частота ротора ω≤ωPmax, то формируют сигнал заданного потокосцепления, который соответствует сигналу потокосцепления ψref. Как только угловая частота превышает граничное значение ω>ωPmax, формируют сигнал задания по потокосцеплению  ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора
ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора  . Далее формируют результирующий сигнал заданного потокосцепления
. Далее формируют результирующий сигнал заданного потокосцепления  ротора асинхронного двигателя, значение которого при ω≤ωPmax соответствует сигналу заданного потокосцепления ψref для зоны ограниченного напряжения, а при ω>ωPmax - значению сигнала задания по потокосцеплению
ротора асинхронного двигателя, значение которого при ω≤ωPmax соответствует сигналу заданного потокосцепления ψref для зоны ограниченного напряжения, а при ω>ωPmax - значению сигнала задания по потокосцеплению  ротора в зоне снижения мощности. 6 ил., 1 табл.
ротора в зоне снижения мощности. 6 ил., 1 табл.
Способ формирования потокосцепления ротора асинхронного двигателя с короткозамкнутым ротором в составе электропривода с векторным полеориентрированным управлением для статического режима работы, заключающийся в том, что обеспечивают создание сигнала заданного момента Mref, посредством которого формируют зависимость потокосцепления ротора от заданного момента Mref для определения значения потокосцепления ротора при заданном моменте  одновременно осуществляют вычисление максимального потокосцепления
одновременно осуществляют вычисление максимального потокосцепления  которым по достижению напряжением статора заданного значения
которым по достижению напряжением статора заданного значения  ограничивают значение потокосцепления
ограничивают значение потокосцепления  ротора при заданном моменте и формируют сигнал потокосцепления ψref, далее определяют граничную угловую частоту вращения ωPmax ротора, причем если угловая частота ротора ω≤ωPmax, то формируют сигнал заданного потокосцепления, который соответствует сигналу потокосцепления Ψref, при этом, как только угловая частота превышает граничное значение ω>ωPmax, формируют сигнал задания по потокосцеплению
ротора при заданном моменте и формируют сигнал потокосцепления ψref, далее определяют граничную угловую частоту вращения ωPmax ротора, причем если угловая частота ротора ω≤ωPmax, то формируют сигнал заданного потокосцепления, который соответствует сигналу потокосцепления Ψref, при этом, как только угловая частота превышает граничное значение ω>ωPmax, формируют сигнал задания по потокосцеплению  ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора
ротора в зоне снижения мощности, который определяют с учетом значения максимального напряжением статора  далее формируют результирующий сигнал заданного потокосцепления
далее формируют результирующий сигнал заданного потокосцепления  ротора асинхронного двигателя, значение которого при ω≤ωPmax соответствует сигналу заданного потокосцепления ψref для зоны ограниченного напряжения, а при ω>ωPmax - значению сигнала задания по потокосцеплению
ротора асинхронного двигателя, значение которого при ω≤ωPmax соответствует сигналу заданного потокосцепления ψref для зоны ограниченного напряжения, а при ω>ωPmax - значению сигнала задания по потокосцеплению  ротора в зоне снижения мощности.
ротора в зоне снижения мощности.
| RU 2132110 C1, 20.06.1999 | |||
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| CN 102832874 A, 19.12.2012. | |||

