Изобретение относится к геодезическому приборостроению, в частности к гидростатическим нивелирам электроконтактного типа, и может быть ис- пользовано для измерения величины присадок или понятий земной поверхности в геодезии, зданий и сооружений в строительстве, в ускорителях элементарных частиц и т.д.
Целью изобретения является повышение надежности и автоматизация измерений.
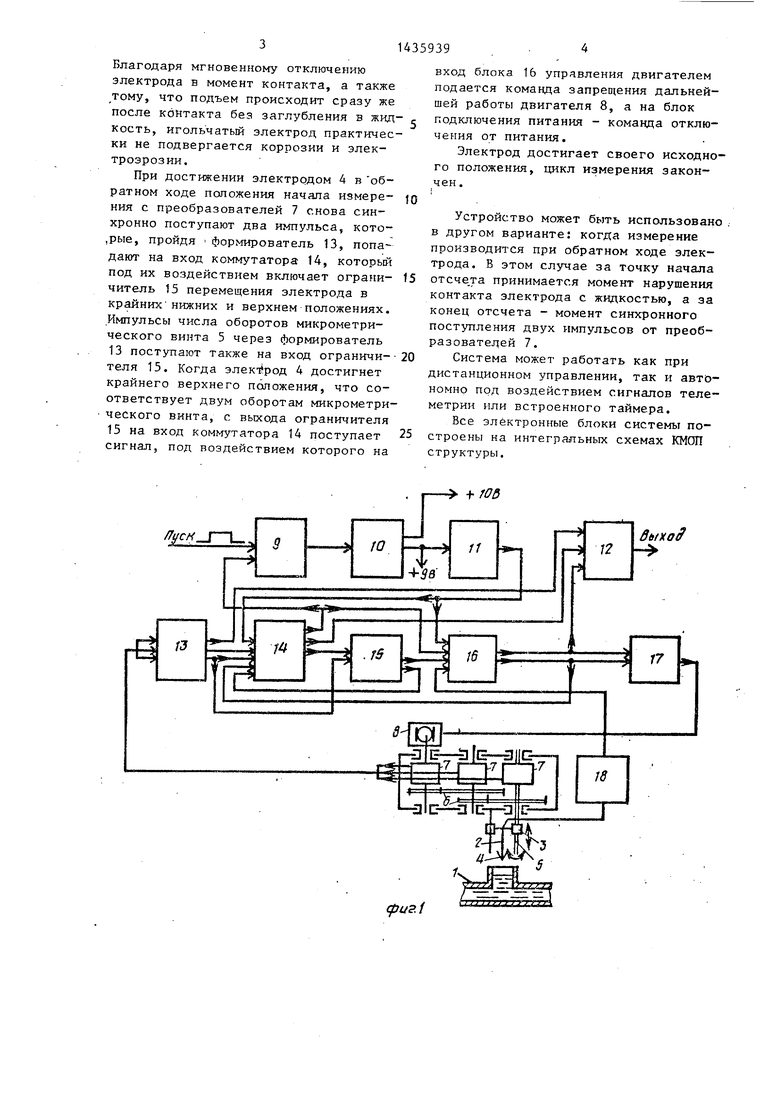
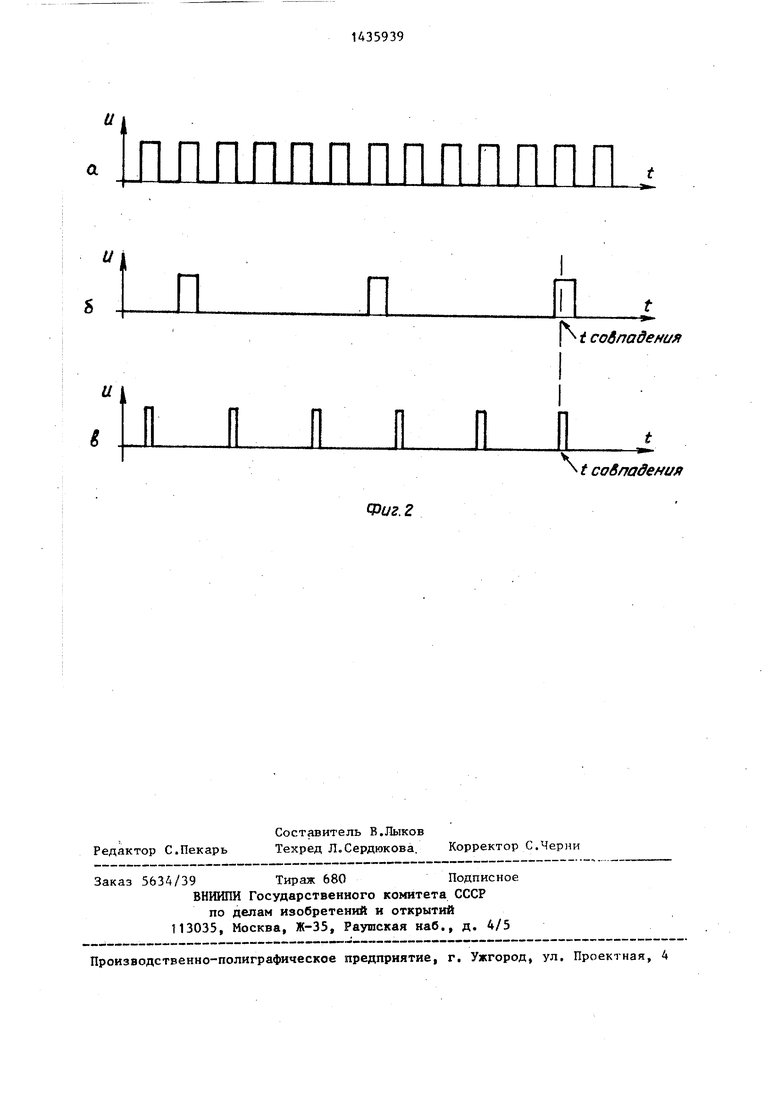
На фиг.1 приведена механическая часть и блок-схема устройства; на фиг.2 - сформированные формирователем прямоугольные импульсы поступающие от блока преобразователей.
Устройство содержит корпус (не показан) , в котором размещены сосуд 1 с жидкостью, шток 2 с ползуном 3 и электродом 4, микрометркческг-ш винт 5, связанные с ним через систему шестерен 6 блок преобразователей 7 и электродвигатель 8, блок 9 подключения питания, стабилизатор 10, формирователь 11 сбросового импульса, схему 12 совпадения., формирователь 13 импульсов, коммутатор 14, ограничитель 15 перемещения электрода, блок 16 управления двигателем, блок 17 согласования и отключающий блок 18.
Устройство работает следующим образом.
По внешней команде, поступившей на блок 9 подключения питания, например по сигналу телеметрии, источник питания (не показан) подключается к стабилизатору 10. Когда напряжение на выходе стабилизатора и на всех элементах схемы достигнет номинального, а игольчатый электрод 4 получит потенциал- питания, с выхода формирователя 11 сбросового лмпульса на входы блока 16 управления двигателем коммутатора 14 поступит сбросовый импульс, устанавливающий триггеры этих блоков в начальное состояние, В этом состоянии с выхода блока 16 управления двигателем через блок 17 согласования поступает команда работы двигателя 8 в прямом направлении, а по связи коммутатор - схема совпадения поступает сигнал запрета вывод информации.
Момент начала измерения наступает не сразу, а только после двух оборотов микрометрического винта 5, что: связано с необходимостью выборки люd)
Q с
0
5
тов всех механических частей устройства.
Положение начала отсчета, которое занимает электрод после двух оборотов винта 5 благодаря жесткой кинематической связи вращающихся частей устройства, остается постоянным от измерения к измерению. Фиксирование положения начала отсчета осуществляется с помощью блока преобразователей 7, которьй работает следующим образом. С началом вращения двигателя, осей и шестерен в преобразователях формируется три вида импульсов: измерительные (фиг.2а), импульсы оборотов микрометрического винта 5 (фиг.26) и импульсы положения электрода (фиг.2в). Измерительные импульсы через формирователь 13 попадают на схему совпадения, но до начала измерения не проходят на выход благодаря действию упомянутого запрещающего сигнала по связи коммутатор - схема совпадения. Два других импульса попадают через формирователь 13 на коммутатор 14, но до момента их синхронного поступления не вызывают в нем никакой новой команды. Совпадение во времени этих импульсов определяет нахождение электрода в положении начала измерения . Это совпадение приводит к переброске триггера в комг гутаторе 14, в результате чего по связи со схемой 12 совпадения, ранее запрещающей передачу информатдии, поступает разрешающий, сигнал. С выхода схемы совпадения начинается -поступление информации (счетных импульсов) во внеппсее приемное устройство.
Вывод измерительных импульсов продолжается до момента касания электродом 4 жидкости. В момент контакта потенциал электрода 4 снижается до нуля и через отключающий блок 18 электрод отключается от питания. Сигнал с отключающего блока 18 поступает на блок 16 управления двигателем и с его выхода через блок 17 согласования в виде команды реверса попадает на электродвигатель 8. Под воздействием сигнала, поступагацего с выхода блока 16 управления двигателем, на выходе коммутатора 14 формируется команда запрета вывода информации, поступающая lia схему 12 совпадения.
Реверс двигателя 8, т.е. обратное его вращение, приводит к подъему электрода 4 от поверхности жидкости.
Благодаря мгновенному отключению электрода в момент контакта, а также тому, что подъем происходит сразу же после контакта без заглубления в жид кость, игольчатый электрод практически не подвергается коррозии и электроэрозии.
При достижении электродом 4 в обратном ходе положения начала измере- ния с преобразователей 7 снова синхронно поступают два импульса, кото- ,рые, пройдя формирователь 13, попа- дают на вход коммутатора 14, которьй под их воздействием включает ограни- читель 15 перемещения электрода в крайних нижних и верхнем положениях. Импульсы числа оборотов микрометрического винта 5 через формирователь 13 поступают также на вход ограничи- теля 15. Когда элекп род 4 достигнет крайнего верхнего положения, что соответствует двум оборотам микрометрического винта, с выхода ограничителя 15 на вход коммутатора 14 поступает сигнал, под воздействием которого на
1435939
вход блока 16 управления двигателем подается команда запреп1ения дальнейшей работы двигателя 8, а на блок подключения питания - команда отключения от питания.
Электрод достигает своего исходного положения, цикл измерения закончен.
Устройство может быть использован в другом варианте: когда измерение производится при обратном ходе электрода. В этом случае за точку начала отсче та принимается момент нарушения контакта электрода с жидкостью, а за конец отсчета - момент синхронного поступления двух импульсов от преоб- paзoвaтeJ eй 7.
Система может работать как при дистанционном управлении, так и автономно под воздействием сигналов телеметрии или встроенного таймера.
Все электронные блоки системы построены на интегральных схемах КМОП структуры.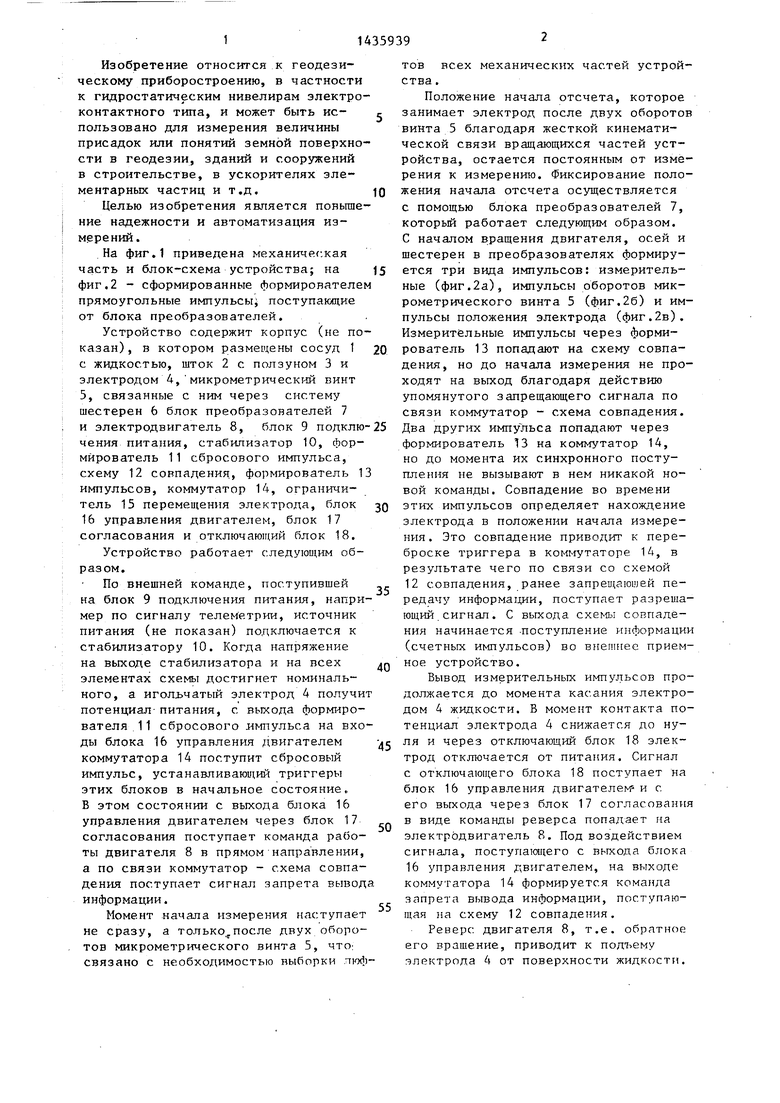
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТОРМОЗНОГО ПРОЦЕССА ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2038237C1 |
| Система для управления и контроля привода гравиметра | 1980 |
|
SU954924A1 |
| Устройство для определения растворимости эмали зуба | 1985 |
|
SU1364331A1 |
| МНОГОКАНАЛЬНЫЙ ПРОГРАММИРУЕМЫЙ ЭЛЕКТРОНЕЙРОСТИМУЛЯТОР | 2004 |
|
RU2286182C2 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для регулировки электромагнитной системы двухобмоточных поляризованных реле | 1982 |
|
SU1072135A1 |
| Устройство для импульсного регулирования частоты вращения асинхронного электродвигателя | 1985 |
|
SU1288884A1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРОВКИ СУДОВЫХ МЕХАНИЗМОВ | 1990 |
|
RU2033596C1 |
| МНОГОПРОГРАММНЫЙ ЦИФРОВОЙ РЕГУЛЯТОР , | 1970 |
|
SU273320A1 |
| Весоизмерительное устройство | 1988 |
|
SU1569569A1 |
дзиг1
япллплллшишл.
f
собпадемия
Фиг. 2
| Васюинский И.Ю. | |||
| Гидронивелирование.- М.: Недра, 1983, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| -•-СОЮЗНАЯ st'C'^ ипГ':Й1Й1;чса:лГ.1:ч.зШ | 0 |
|
SU393577A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
