(Л
00
о:
оо
9и.г.1
|каретки 3, датчик 10 угла наклона провода 2, усилитель-преобразователь (УП) 11 каретки 3, статоры 16 и 17 датчика крайних витков намотанного слоя,блок задания угла наклона провода 2 с коммутирующим элементом (КЭ) 20 и усилителем 26, регулируемый источник 25 смещения провода 2, Каретка 3 механически связана через ходовой винт 6 с исполнительным элементом (ИЭ) 12. Датчик 10 угла на- :КЛона провода 2 включает в себя из- {мерительный рычаг 7 ротора 8 и обмот ку статоров 9, соединенную через пер 1зый вход У-П 11 каретки 3 с ИЭ 12 |привода каретки 3. Регулируемый ис- ;точник 25 смещения провода 2 связан ;через контакты 23 и 24 с вторым входом У-П 11 каретки 3. Статоры 16 и 17 датчика крайних витков намотанного слоя подключены к управляющему входу регулируемого источника 25 смещения провода 2. Управляющие об- I мотки 21 и 22 подключены через усилитель 26 КЭ 20 к выходу У-П 11 ка- ретки 3. При вращении каркаса 1 про- iисходит намотка провода ёиток к витку, при зтом провод 2, перемещаясь вдоль оси вращения каркаса 1, увлекает за собой рычаг 7 датчика 10 угла наклона провода 2 и тем самым вносит рассогласование в схему управления приводом каретки 3. Сигнал рассогласования,.воздействующий через первый вход У-П 11 на управляющую обмотку ИЭ 12, отрабатывается послед- I ним, обеспечивая слежение каретки 3 за перемещением провода 2 вдоль оси вращения каркаса 1. Когда каретка 3 находится в правом или левом крайнем положении, то в результате взаимодействия обмоток статоров 16 или 17 с якорем 18 сигнал, поступающий на второй вход У-П 11 каретки 3 через контакты 23 и 24 КЭ 20, равен нулю, поэтому угол наклона у- провода 2 будет также равен нулю. При отклонении каретки от крайнего правого или левого положения якорь 18 выходит из зоны взаимодействия со статорами 16 и 17, в результате на выходе регулируемого источника 25 смещения появляется сигнал, который нарастает по мере выхода якоря 18 из зоны взаимодействия со статорами 16 или 17. Сигнал, поступающий с выхода источника 25 на второй вход У-П 11, определяет величину угла наклона v. Знак угла V определяется направлением движения каретки 3. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для намотки провода | 1983 |
|
SU1270810A1 |
| Станок для намотки электрических катушек | 1986 |
|
SU1427430A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU866594A1 |
| Станок для намотки электрических катушек | 1977 |
|
SU743051A2 |
| Станок для намотки электрических катушек | 1973 |
|
SU597014A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| Станок для намотки электрических катушек | 1981 |
|
SU1078482A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
| Станок для намотки обмоток электрических катушек | 1980 |
|
SU1023418A1 |
| Устройство для измерения линейного перемещения | 1981 |
|
SU1113662A1 |
Изобретение относится к области электротехники, а именно к технологическому оборудованию для изготовления катушек. Цель изобретения - повышение качества намотки за счет более точного регулирования угла наклона провода в зоне крайних витков намотанного слоя. Устройство с каркасом 1 для намотки провода 2 содержит каретку 3, ходовой винт 6, исполнительный элемент 12 привода
1
Изобретение относится к технологическому, оборудованию для изготовления электрических катушек и может быть использовано в электронной, радио- и электротехнической промышленности.
Цель изобретения - повышение качества намотки за счет более точного регулирования угла наклона провода в зоне крайних витков намотанного слоя.
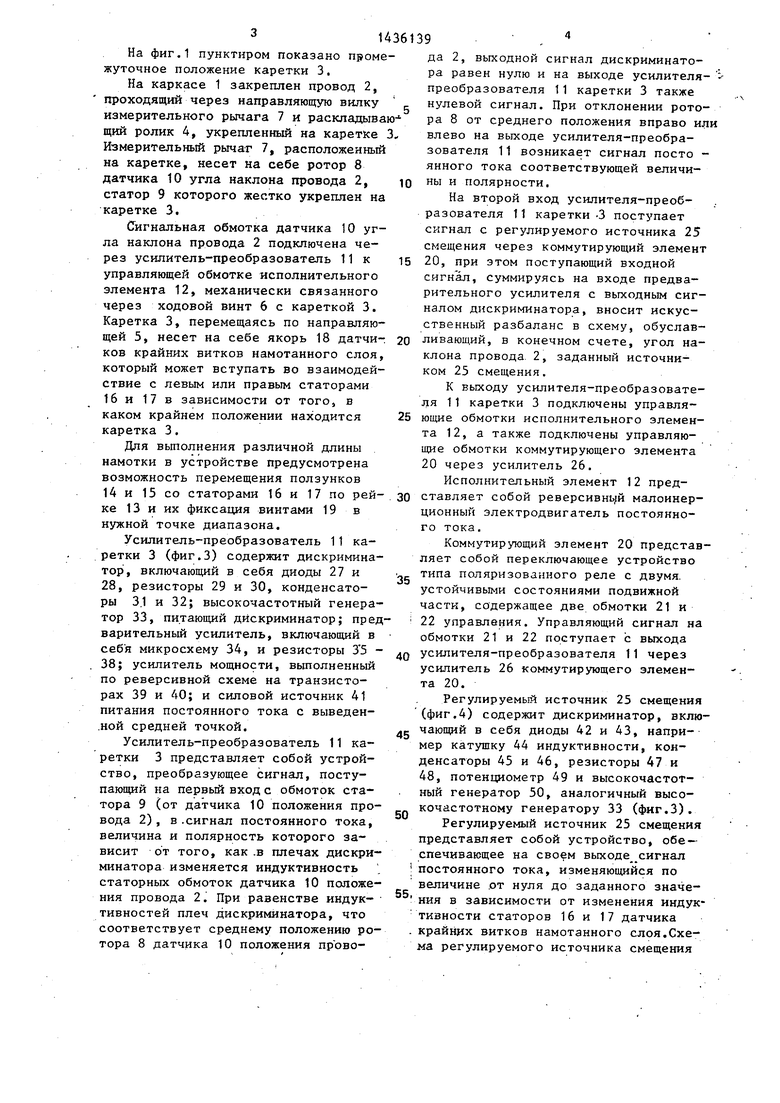
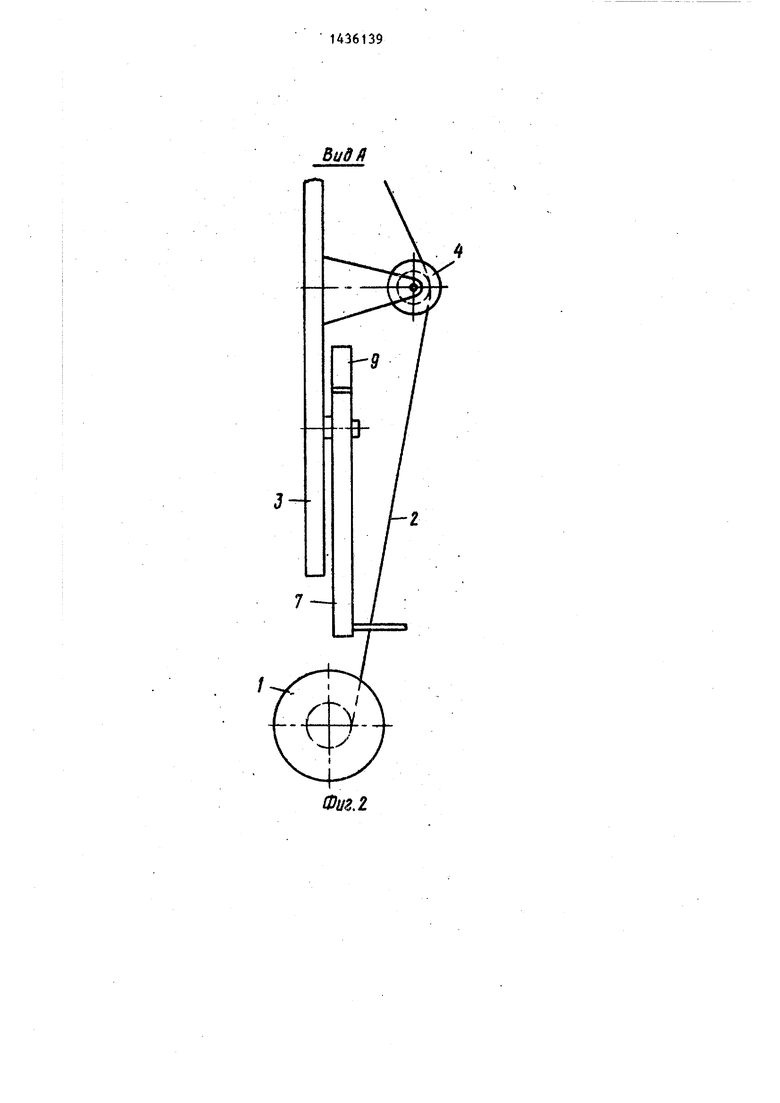
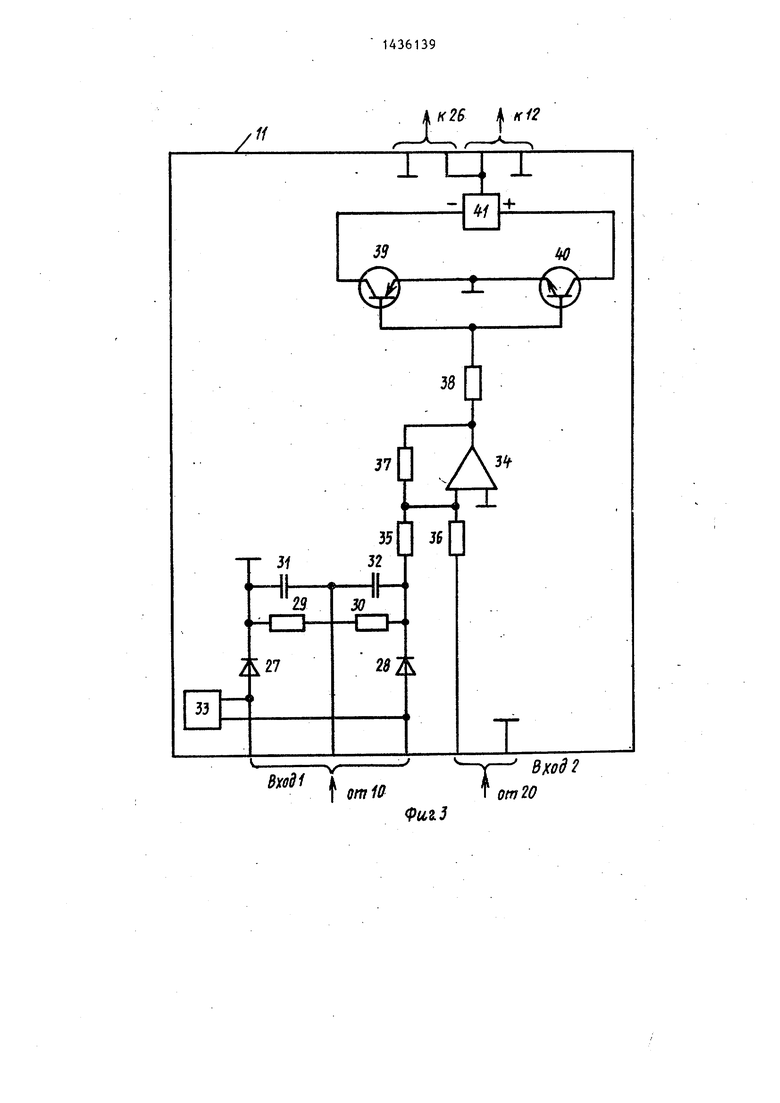
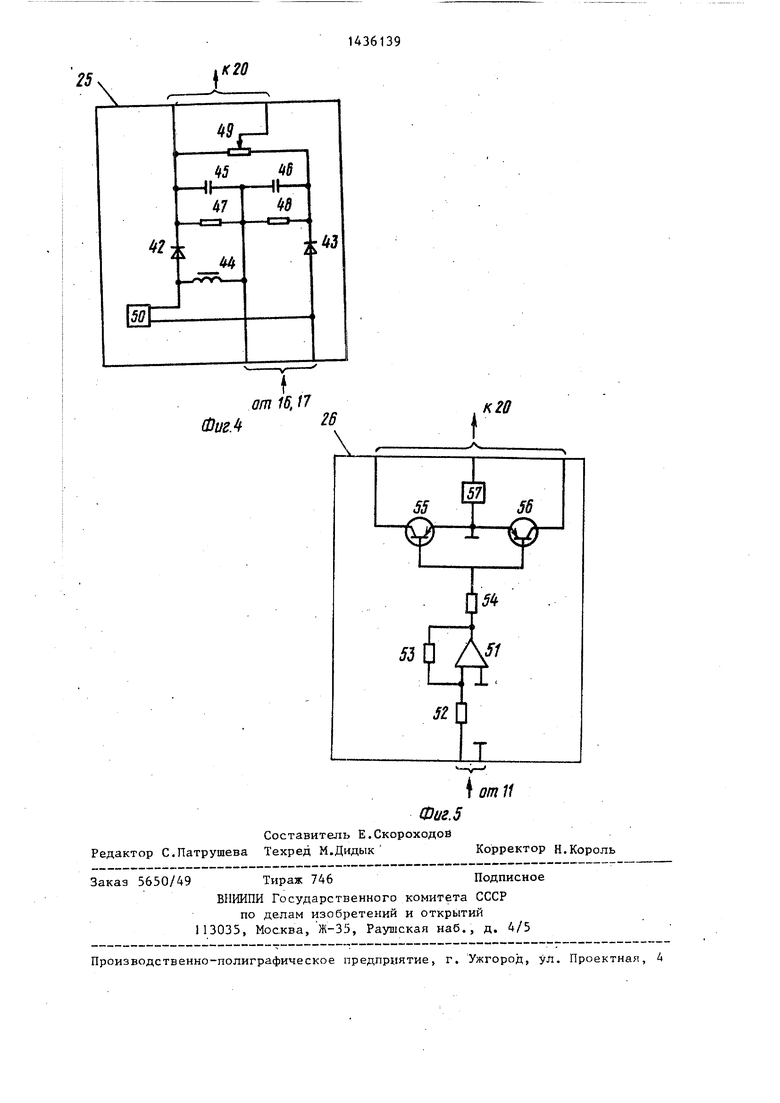
На фиг.1 представлена схема устройства; на фиг.2 - вид А на фиг.1; на фиг.З - усилитель-преобразователь каретки; на фиг.4 - регулируемый источник смещения; на фиг.5 - усилитель коммутирующего элемента.
Устройство для намотки на каркас 1 провода 2 содержит каретку 3 с раскладывающим роликом 4, направляющей 5 и ходовым Винтом 6; измерительный рычаг 7 с ротором 8 и статором 9 датчика 10 угла наклона провода 2;
усилитель-преобразователь 11 каретки 3; исполнительный элемент 12 привода каретки 3; рейку 13 со скользящими по ней ползунками 14 и 15 и статорами 16 и 17 датчика крайних
витков- намотанного слоя; якорь 18 датчика крайних витков намотанного слоя, закрепленный на каретке 3; винты 19, фиксирующие ползунки 14 и 15 на рейке 13; коммутирующий элемент
20 с управляющими обмотками 21 и 22 и переключающими контактами 23 и 24; регулируемый источник 25 смещения и усилитель 26 коммутирующего элемента 20.
На фиг.1 пунктиром показано промежуточное положение каретки 3,
На каркасе 1 закреплен провод 2, проходящий через направляющую вилку измерительного рычага 7 и раскладыва щий ролик 4, укрепленный на каретке Измерительный рычаг 7, расположенный на каретке, несет на себе ротор 8 датчика 10 угла наклона провода 2, статор 9 которого жестко укреплен на каретке 3.
Сигнальная обмотка датчика 10 угла наклона провода 2 подключена через усилитель-преобразователь 11 к управляющей обмотке исполнительного элемента 12, механически связанного через ходовой винт 6 с кареткой 3. Каретка 3, перемещаясь по направляющей 5, несет на себе якорь 18 датчиков крайних витков намотанного слоя, который может вступать во взаимодействие с левым или правым статорами 16 и 17 в зависимости от того, в каком крайнем положении находится каретка 3.
Для вьтолнения различной длины намотки в устройстве предусмотрена возможность перемещения ползунков 14 и 15 со статорами 16 и 17 по рейке 13 и их фиксация винтами 19 в нужной точке диапазона.
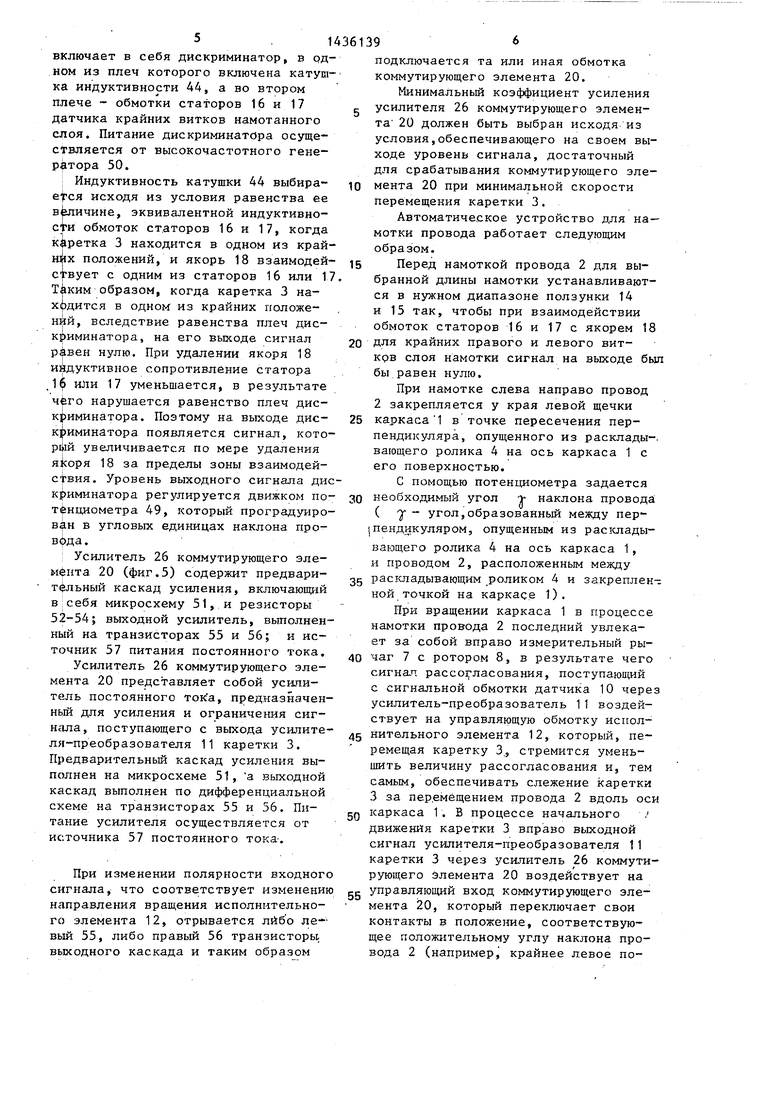
Усилитель-преобразователь 11 каретки 3 (фиг.З) содержит дискримина- Topi, включающий в себя диоды 27 и 28, резисторы 29 и 30, конденсаторы 3,1 и 32; высокочастотный генератор 33, питающий дискриминатор; предварительный усилитель, включающий в себя микросхему 34, и резисторы 35 - 38; усилитель мощности, выполненный по реверсивной схеме на транзисторах 39 и 40; и силовой источник 41 питания постоянного тока с выведен- .ной средней точкой.
Усилитель-преобразователь 11 каретки 3 представляет собой устройство, преобразующее сигнал, поступающий на первый вход с обмоток статора 9 (от датчика 10 положения провода 2) , в -сигнал постоянного тока, величина и полярность которого зависит от того, как .в плечах дискриминатора изменяется индуктивность статорных обмоток датчика 10 положения провода 2. При равенстве индук- тивностей плеч дискриминатора, что соответствует среднему положению ротора 8 датчика 10 положения пр ово0
5
0
5
да 2, выходной сигнал дискриминатора равен нулю и на выходе усилителя- -- преобразователя 11 каретки 3 также нулевой сигнал. При отклонении ротора 8 от среднего положения вправо или влево на выходе усилителя-преобразователя 11 возникает сигнал посто - янного тока соответствующей величины и полярности.
На второй вход усилителя-преобразователя 11 каретки -3 поступает сигнал с регулируемого источника 25 смещения через коммутирующий элемент 20, при этом поступающий входной сигнал, суммируясь на входе предварительного усилителя с выходным сигналом дискриминатора, вносит искусственный разбаланс в схему, обуславливающий, в конечном счете, угол наклона провода 2, заданный источником 25 смещения.
К выходу усилителя-преобразователя 11 каретки 3 подключены управляющие обмотки исполнительного элемента 12, а также подключены управляющие обмотки коммутирующего элемента 20 через усилитель 26.
Исполнительный элемент 12 представляет собой реверсивной малоинерционный электродвигатель постоянного тока.
Коммутирующий элемент 20 представляет собой переключающее устройство типа поляризованного реле с двумя, устойчивыми состояниями подвижной части, содержащее две обмотки 21 и 22 управления. Управляющий сигнал на обмотки 21 и 22 поступает с выхода усилителя-преобразователя 11 через усилитель 26 коммутирующего элемента 20.
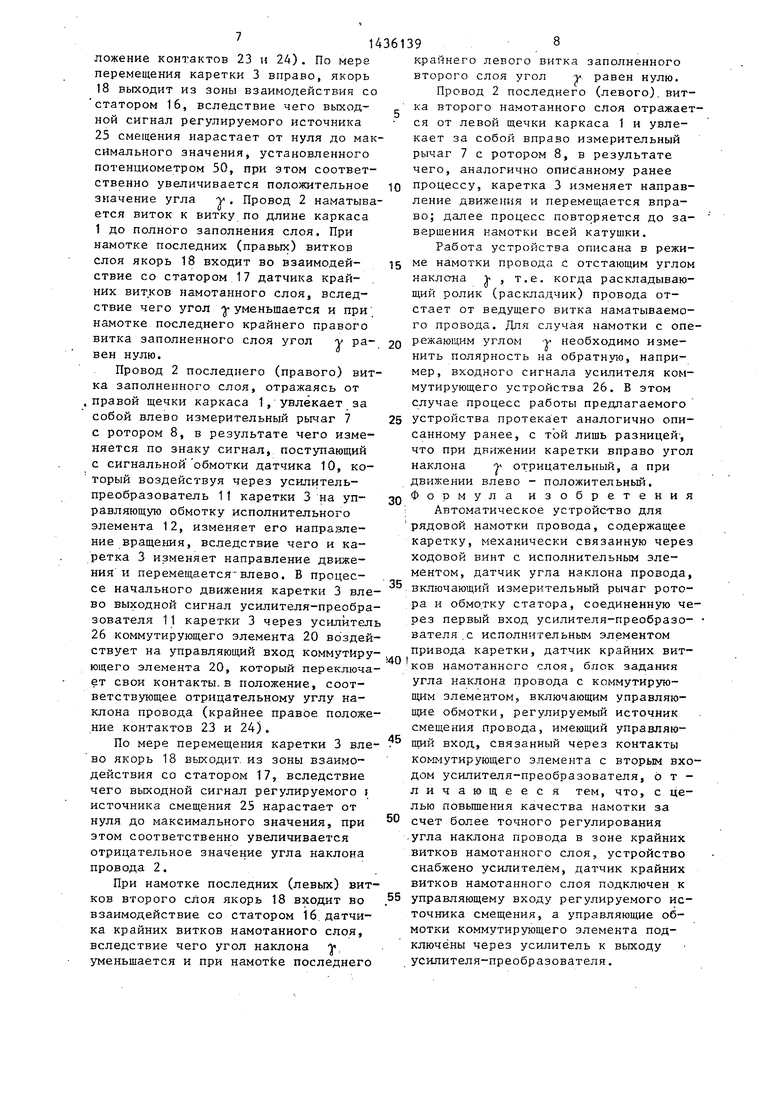
Регулируемый источник 25 смещения (фиг.4) содержит дискриминатор, вклю- с чаюЕЦИй в себя диоды 42 и 43, например катушку 44 индуктивности, конденсаторы 45 и 46, резисторы 47 и 48, потенциометр 49 и высокочастотный генератор 50, аналогичный высокочастотному генератору 33 (фиг.З).
Регулируемый источник 25 смещения представляет собой устройство, обеспечивающее на своем выходе сигнал постоянного тока, изменяющийся по величине от нуля до заданного значения в зависимости от изменения индуктивности статоров 16 и 17 датчика крайних витков намотанного слоя.Схема регулируемого источника смещения
0
5
0
0
; Индуктивность катушки 44 выбира- е |гся исходя из условия равенства ее в ичине, эквивалентной индуктивно- обмоток статоров 16 и 17, когда каретка 3 находится в одном из край- положений, и якорь 18 взаимодей- с одним из статоров 16 или 17 образом, когда каретка 3 на- )дится в одном из крайних положе- , вследствие равенства плеч дис )иминатора, на его выходе сигнал равен нулю. При удалении якоря 18 ийдуктивное сопротивление статора ,1б или 17 уменьшается, в результате чего нарушается равенство плеч дискриминатора. Поэтому на выходе дискриминатора появляется сигнал, кото- р41й увеличивается по мере удаления 18 за пределы зоны взаимодей- . Уровень выходного сигнала дискриминатора регулируется движком по- тёнщюметра 49, который проградуиро- вфн в угловых единицах наклона про- вфда.
Усилитель 26 коммутирующего эле- мфита 20 (фиг.5) содержит предвари- тфльный каскад усиления, включающий в:себя микросхему 51, и резисторы 52-54; выходной усилитель, вьшолнен- ный на транзисторах 55 и 56; и источник 57 питания постоянного тока.
Усилитель 26 коммутирующего элемента 20 представляет собой усилитель постоянного ток а, предназначенный для усиления и ограничения сиг- Нс ша, поступающего с выхода усилителя-преобразователя 11 каретки 3. Предварительный каскад усиления выполнен на микросхеме 51, а выкодной каскад выполнен по дифференциальной схеме на транзисторах 55 и 56. Питание усилителя осуществляется от источника 57 постоянного тока-.
При изменении полярности входного сигнала, что соответствует изменению направления вращения исполнительного элемента 12, отрывается либо левый 55, либо правый 56 транзисторы выходного каскада и таким образом
9
подключается та или иная обмотка коммутирующего элемента 20.
Минимальный коэффициент усиления усилителя 26 коммутирующего элемента 20 должен быть выбран исходя из условия,обеспечивающего на своем выходе уровень сигнала, достаточный для срабатывания коммутирующего элемента 20 при минимальной скорости перемещения каретки 3.
Автоматическое устройство для намотки провода работает следующим образом.
Перед намоткой провода 2 для выбранной длины намотки устанавливаются в нужном диапазоне ползунки 14 и 15 так, чтобы при взаимодействии обмоток статоров 16 и 17 с якорем 18 для крайних правого и левого вит- крв слоя намотки сигнал на выходе был бы равен нулю.
При намотке слева направо провод 2 закрепляется у края левой щечки каркаса 1 в точке пересечения перпендикуляра, опущенного из расклады-, вающего ролика 4 на ось каркаса 1 с его поверхностью.
С помощью потенциометра задается необходимый угол т наклона провода ( j - угол,образованный между пер
пендикуляром, опущенным из раскладывающего ролика 4 на ось каркаса 1, и проводом 2, расположенным между раскладывающим роликом 4 и закрепленной точкой на каркасе 1).
При вращении каркаса 1 в процессе намотки провода 2 последний увлекает за собой вправо измерительный ры- чаг 7 с ротором 8, в результате чего сигнал рассо1; ласования, поступаюищй с сигнальной обмотки датчика 10 через усилитель-преобразователь 11 воздействует на управляющую обмотку исполнительного элемента 12, который, пе
ремещая каретку 3., стремится уменьшить величину рассогласования и, тем самым, обеспечивать слежение каретки 3 за перемещением провода 2 вдоль оси каркаса 1 . В процессе начального , движения каретки 3 вправо выходной сигнал усилителя-преобразователя 11 каретки 3 через усилитель 26 коммутирующего элемента 20 воздействует на управляющий вход коммутирующего элемента 20, который переключает свои контакты в положение, соответствующее положительному углу наклона провода 2 (например, крайнее левое положение контактов 23 и 24). По мере перемещения каретки 3 вправо, якорь 18 выходит из зоны взаимодействия со статором 16, вследствие чего выходной сигнал регулируемого источника
25смещения нарастает от нуля до максимального значения, установленного потенциометром 50, при этом соответственно увеличивается положительное значение угла v , Провод 2 наматывается виток к витку по длине каркаса
1 до полного заполнения слоя. При намотке последних (правых) витков слоя якорь 18 входит во взаимодействие со статором 17 датчика крайних витков намотанного слоя, вследствие чего угол -J-уменьшается и при намотке последнего крайнего правого витка заполненного слоя угол л/ равен нулю.
Провод 2 последнего (правого) витка заполненного слоя, отражаясь от
правой щечки каркаса 1, увлекает за собой влево измерительный рьиаг 7 с ротором 8, в результате чего изменяется по знаку сигнал, поступающий с сигнальной обмотки датчика 10, который воздействуя через усилитель- преобразователь 11 каретки 3 на управляющую обмотку исполнительного элемента 12, изменяет его направление вращения, вследствие чего и каретка 3 изменяет направление движения и перемещается-влево. В процессе начального движения каретки 3 влево выходной сигнал усилителя-преобразователя 11 каретки 3 через усилитель
26коммутирующего элемента 20 воздействует на управляющий вход коммутирующего элемента 20, который переключает свои контакты.в положение, соответствующее отрицательному углу наклона провода (крайнее прав1эе положение контактов 23 и 24).
По мере перемещения каретки 3 вле- во якорь 18 выходит, из зоны взаимодействия со статором 17, вследствие чего выходной сигнал регулируемого i источника смещения 25 нарастает от нуля до максимального значения, при этом соответственно увеличивается отрицательное значение угла наклона провода 2.
При намотке последних (левых) витков второго слоя якорь 18 входит во взаимодействие со статором 16 датчика крайних витков намотанного слоя, вследствие чего угол наклона у. уменьшается и при HaMOTke последнего
крайнего левого витка заполненного второго слоя угол 7 равен нулю.
Провод 2 последнего (левого), витка второго намотанного слоя отражается от левой щечки каркаса 1 и увлекает за собой вправо измерительный рычаг 7 с ротором 8, в результате чего, аналогично описанному ранее
процессу, каретка 3 изменяет направление движения и перемещается вправо; далее процесс повторяется до за- вершения намотки всей катушки.
Работа устройства описана в режиме намотки провода с отстающим углом наклона , т.е. когда раскладывающий ролик (раскладчик) провода отстает от ведущего витка наматываемого провода. Для случая намотки с опережающим углом -у необходимо изменить полярность на обратную, например, входного сигнала усилителя коммутирующего устройства 26. В этом случае процесс работы предлагаемого
устройства протекает аналогично описанному ранее, с той лишь разницей , что при движении каретки вправо угол наклона -v отрицательный, а при движении влево - положительный. Форм у л а изобретения
Автоматическое устройство для рядовой намотки провода, содержащее каретку, механически связанную через ходовой винт с исполнительным элементом, датчик угла наклона провода, включающий измерительный рычаг ротора и обмотку статора, соединенную через первый вход усилителя-преобразо- вателя.с исполнительным элементом привода каретки, датчик крайних вит ков намотанного слоя, блок задания угла наклона провода с коммутирующим элементом, включающим управляющие обмотки, регулируемый источник смещения провода, имеющий управляющий вход, связанный через контакты коммутирующего элемента с вторым входом усилителя-преобразователя, 6 т - личающеес я тем, что, с целью повьшения качества намотки за счет более точного регулирования .угла наклона провода в зоне крайних витков намотанного слоя, устройство снабжено усилителем, датчик крайних витков намотанного слоя подключен к управляющему входу регулируемого источника смещения, а управляющие обмотки коммутирующего элемента подключены через усилитель к выходу усилителя-преобразователя.
Вид/I
Фиг. 2
omWТ om20
U2.5
B
Т om20
B}(od2
.5
К20
49
ftS
Hb
47
«5
«/-Г
44
::«3
от 16.17 Фиг, If26
Фиг. 5
Составитель Е.Скороходов Редактор С.Патрушева Техред М.Дидык Корректор Н.Король
Заказ 5650/49 Тираж 746Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
к го
om11
| Устройство для намотки провода | 1983 |
|
SU1270810A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 0 |
|
SU390588A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
