сл
G
ifka.f
передачи 6 - с приводом 5, блок управления 7, каретку 8, связанную с тахо- генератором 20 и приводом 21, который подключен через первый вход усилителя 19 к тахогенератору 20, а че- реэ второй вход - к устройству реверса 26. Регулятор коэффициента передачи 27 подключен к тахогенератору 4, датчик крайних витков намотанного слоя с контактами 22 и 23 электрически связан с устройством реверса 26. Преобразователь 17 подключен к интегрирующему элементу 18 и датчику 15 угла наклона провода, а интегрирующий элемент 18 - к третьему входу усилителя 19. При вращении шпинделя с кар- касом каретка перемещается с заданным шагом намотки, равным диаметру провода, в результате чего провод накатывается на каркас виток к витку. По
мере намотки вследствие накопления погрешности шага намотки изменяется угол наклона провода и измерительный рычаг 12 датчика 15 угла наклона провода отклоняется от нейтрали, что приводит к возникновению сигнала рассогласования, который, воздействуя через преобразователь 17, интегрирующий эле1мент 18 и усилитель 19 на уп- равляклцую обмотку привода 21, компенсирует накопленную погрешность шага намотки в соответствии с диаметром наматываемого провода. При возникновении отдельных сбоев витков интегрирующий элемент 18 вносит запаздывание в схему управления датчика угла наклона и тем самым исключает возможность реагирования на быстро изменяющееся угловое положение ротора 13, предотвращая сбои укладки провода. 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки электрических катушек | 1973 |
|
SU597014A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU866594A1 |
| Станок для намотки электрических катушек | 1977 |
|
SU743051A2 |
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| Станок для намотки электрических катушек | 1981 |
|
SU1078482A1 |
| Автоматическое устройство для рядовой намотки провода | 1986 |
|
SU1436139A1 |
| Станок для намотки обмоток электрических катушек | 1980 |
|
SU1023418A1 |
| Станок для намотки электрических катушек | 1983 |
|
SU1150667A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
Изобретение относится к технологическому оборудованию для изготовления электрических катушек и может быть использовано в электро- и радиотехнической промьшшенности. Целью изобретения является повышение качества, намотки электрических катушек за счет повышения точности укладки про- вода. Устройство содержит шпиндель 3 наматываемой катушки, связанный с тахогенератором 4 и через механизм
1
Изобретение относится к технологическому оборудованию для изготовления электрических катушек и может быть использовано в электронной, радио- и электротехнической промышленности.
Целью изобретения является повыше ние качества намотки электрических катушек за счет повышения точности укладки провода.
На фиг.1 представлена схема станка; на фиг.2 - вид А на фиг.1; на фиг.З - схема блока управления приводом шпинделя; на фиг.4 - схема преобразователя} на фиг.З - схема усилителя каретки; на фиг.6 - схема устройства реверса привода каретки; на фиг.7 - схема регулятора коэффициента передачи.
Станок для намотки на каркас 1 провода 2 содержит шпиндель 3, на котором расположен тахогенератор 4 шпинделя 3, привод 5 шпинделя 3,- связанный через механизм 6 передачи со шпинделем 3, блок 7 управления приводом шпинделя 3, каретку 8 с раскладывающим роликом 9, направляющей 10, ходовым винтом 11, измерительным рычагом 12, ротором 13, статором 14 датчика 15 угла наклона провода 2 и контактом 16, преобразователь 17, ин- .тегрирующий элемент 18, усилитель 19
тахогенерато р 20, связанный с приводом 21 каретки 8, датчик крайних витков намотанного слоя с контактами 22 и 23, закрепленными на ползунках,
скользящих по рейке 24 с фиксированием их положения винтами 25, устройст- во 26 реверса привода каретки и регулятор 27 коэффициента передачи.
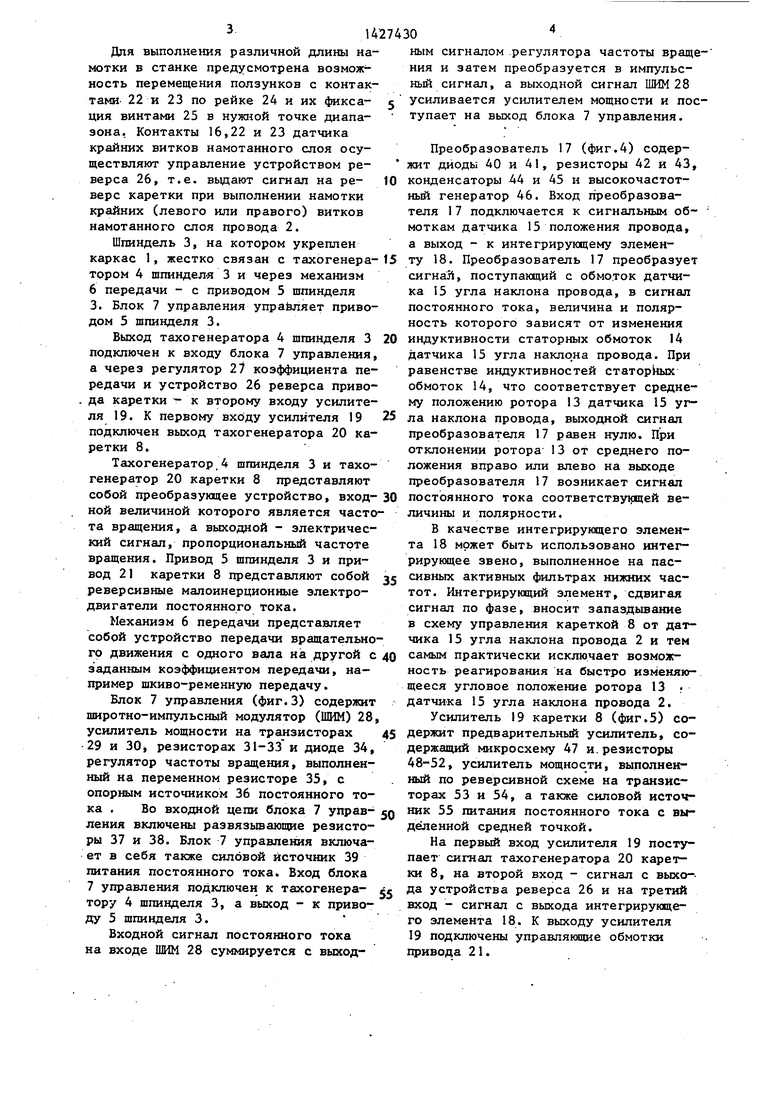
Провод 2 проходит к каркасу 1 через направляющую вилку измерительного рычага 12 и раскладывакяций ролик 9., укрепленный на каретке В.. Измерительный рычаг 12 несет на себе ротор 13 датчика 15 угла наклона провода 2, статор 14 которого жестко закреплен на каретке 8. Сигнальная обмотка дат- . чика 15 угла наклона провода 2 подключена через преобразователь 17, интегрирующий элемент 18 И через третий
вход усилителя 19 к управляющей обмотке привода 21, механически связанного непосредственно с тахогенерато- ром 20 каретки 8 и ходовым винтом 11 каретки 8.
5
30
Каретка 8 несет на себе контакт 16 датчика крайних витков намотанного слоя, который может замыкаться с левым 22 или правым 23 контактами в зависимости от того, в каком крайнем положении находится каретка 8.
Для выполнения различной длины намотки в станке предусмотрена возмож ность перемещения ползунков с контак- тамк 22 к 23 по рейке 24 и их фиксация винтами 25 в нужной точке диапазона. Контакты 16,22 и 23 датчика крайних витков намотанного слоя осуществляют управление устройством реверса 26, т.е. выдают сигнал на реверс каретки при выполнении намотки крайних (левого или правого) витков намотанного слоя провода 2.
Шпиндель 3, на котором укреплен каркас 1, жестко связан с тахогенератором 4 шпинделя 3 и череэ механизм 6 передачи - с приводом 5 шпинделя 3. Блок 7 управления управляет приводом 5 шпинделя 3.
Выход тахогенератора 4 шпинделя 3 подключен к входу блока 7 управления а через регулятор 27 коэффициента передачи и устройство 26 реверса привода каретки к второму входу усилителя 19. К первому входу усилителя 19 подключен выход тахогенератора 20 каретки 8.
Тг1хогенератор 4 шпинделя 3 и тахо- генератор 20 каретки 8 представляют собой преобразующее устройство, вход- ной величиной которого является частота вращения, а выходной - электрический сигнал, пропорциональный частоте вращения. Привод 5 шпинделя 3 и привод 2) каретки 8 представляют собой реверсивные малоинерционные электродвигатели постоянного тока.
Механизм 6 передачи представляет собой устройство передачи вращательно
го движения с одного вала на другой с 40 самым практически исключает возможзаданным коэффициентом передачи, например шкиво-ременную передачу.
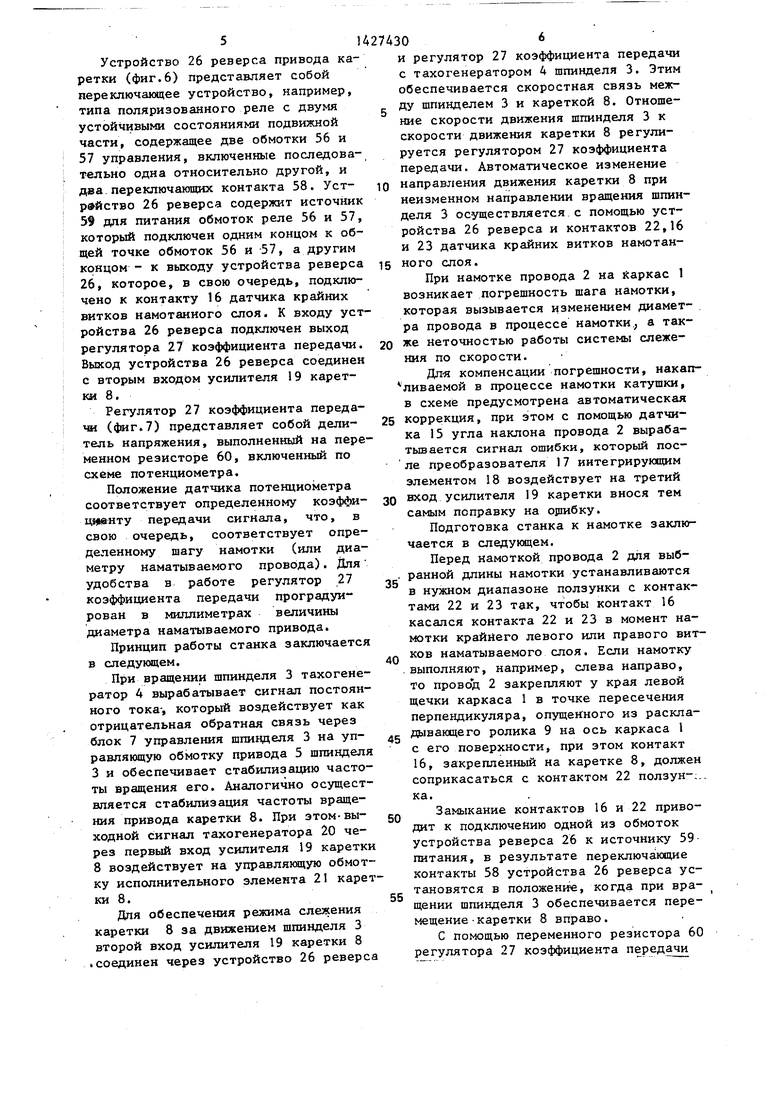
Блок 7 управления (фиг.3) содержит широтно-импульсный модулятор (ШИМ) 28, усилитель мощности на транзисторах 45 29 и 30 резисторах 31-33 и диоде 34, регулятор частоты вращения, выполненный на переменном резисторе 35, с опорным источником 36 постоянного тоВо входной цепи блока 7 управ- CQ ник 55 питания постоянного тока с выка .
ления включены развязывающие резисторы 37 и 38. Блок 7 управле1шя включает в себя также силовой источник 39 питания постоянного тока. Вход блока 7 управления подключен к тахогенера- « тору 4 шпинделя 3, а выход - к приводу 5 шпинделя 3.
Входной сигнал постоянного тока на входе ШИМ 28 суммируется с выходдёленной средней точкой.
На первый вход усилителя 19 поступает сигнал тахогенератора 20 каретки 8, на второй вход - сигнал с выхо-- да устройства реверса 26 и на третий вход - сигнал с выхода интегрирующего элемента 18. К выходу усилителя 19 подключены управляющие обмотки привода 21.
0
5
0 5
0 35
ным сигналом .регулятора частоты враще- ния и затем преобразуется в импульсный сигнал, а выходной сигнал ШИМ 28 усиливается усилителем мощности и поступает на выход блока 7 управления.
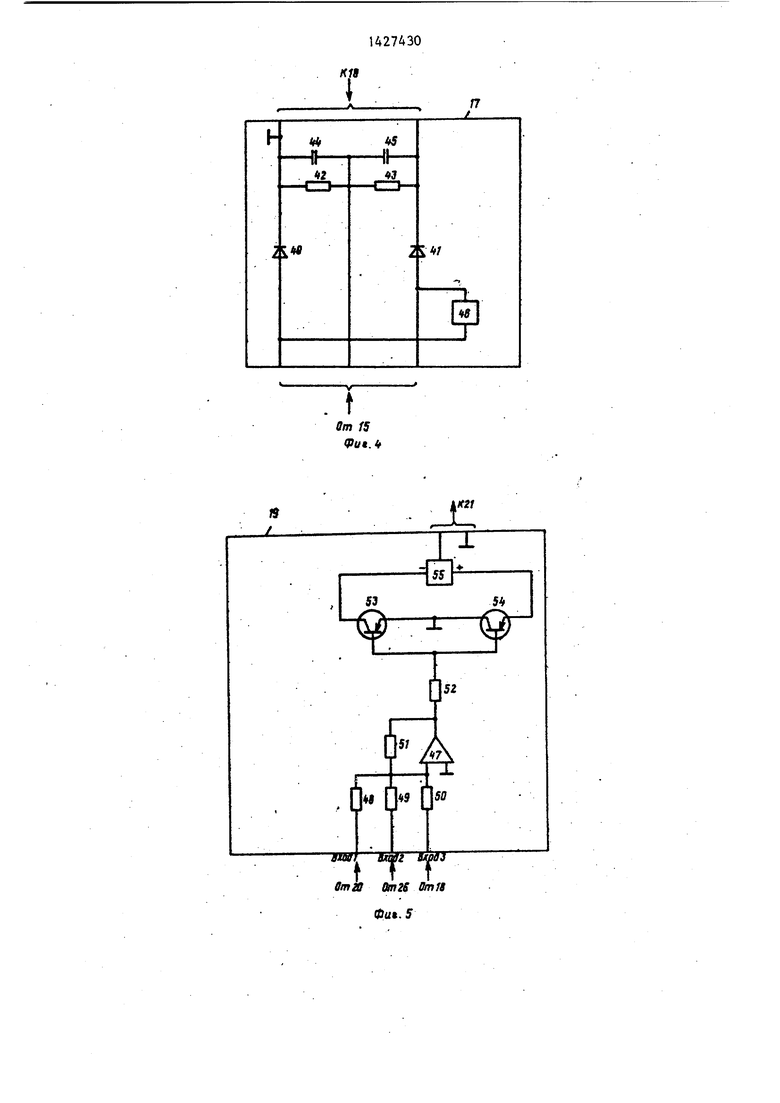
Преобразователь 17 (фиг.4) содержит диоды 40 и 41, резисторы 42 и 43, конденсаторы 44 и 45 и высокочастотный генератор 46. Вход преобразователя 17 подключается к сигнальным об- моткам датчика 15 положения провода, а выход - к интегрирующему элементу 18. Преобразователь 17 преобразует сигнай, поступающий с обмоток датчика 15 угла наклона провода, в сигнал постоянного тока, величина и полярность которого зависят от изменения индуктивности статорных обмоток 14 датчика 15 угла накло,на провода. При равенстве индуктивноетей статорйых обмоток 14, что соответствует среднему положению ротора 13 датчика 15 угла наклона провода, выходной сигнал преобразователя 17 равен нулю. При отклонении ротора 13 от среднего положения вправо или влево на выходе преобразователя 17 возникает сигнал постоянного тока соответствующей величины и полярности.
в качестве интегрирующего элемента 18 может быть использовано интегрирующее звено, выполненное на пассивных активных фильтрах нижних частот. Интегрирующий элемент, сдвигая сигнал по фазе, вносит запаздывание в схему управления кареткой 8 от датчика 15 угла наклона провода 2 и тем
ность реагирования на быстро изменяющееся угловое положение ротора 13 датчика 15 угла наклона провода 2.
Усилитель 19 каретки 8 (фиг.5) содержит предварительный усилитель, содержащий микросхему 47 и.резисторы 48-52, усилитель мощности, выполненный по реверсивной схеме на транзис торах 53 и 54, а также силовой источник 55 питания постоянного тока с выдёленной средней точкой.
На первый вход усилителя 19 поступает сигнал тахогенератора 20 каретки 8, на второй вход - сигнал с выхо-- да устройства реверса 26 и на третий вход - сигнал с выхода интегрирующего элемента 18. К выходу усилителя 19 подключены управляющие обмотки привода 21.
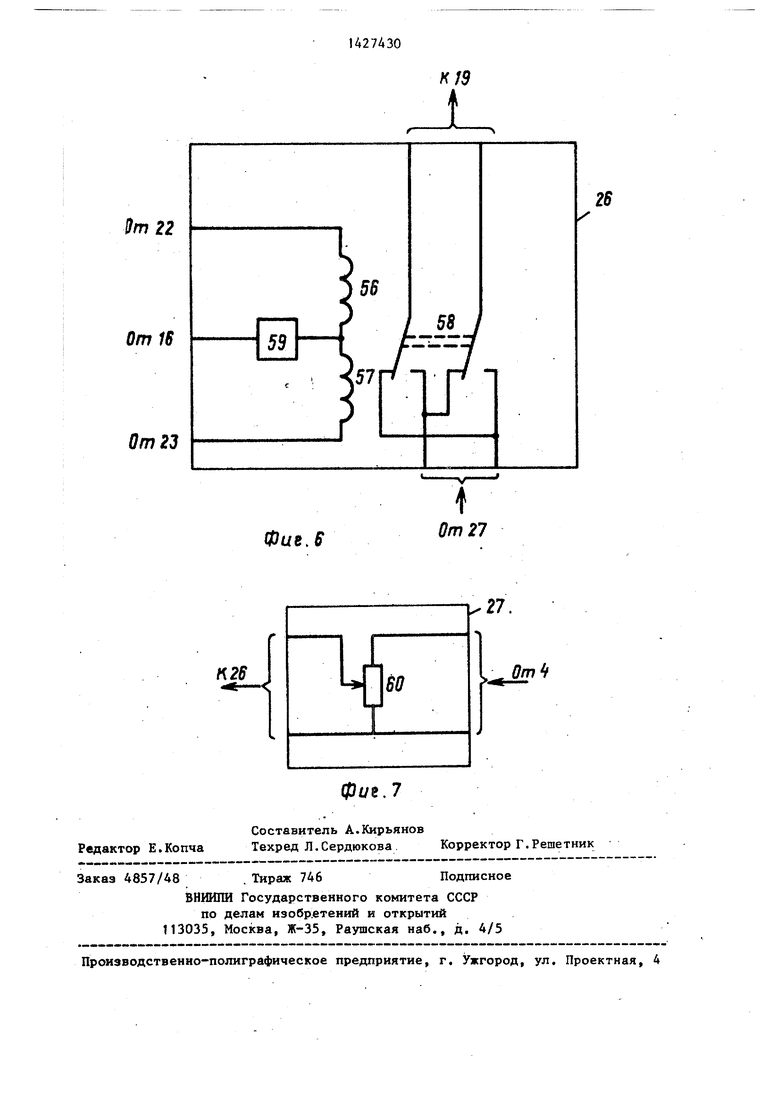
Устройство 26 реверса привода каретки (фиг.6) представляет собой переключающее устройство, например, типа поляризованного реле с двумя устойчивыми состояниями подвижной части, содержащее две обмотки 56 и 57 управления, включенные последовательно одна относительно другой, и дава переключающих контакта 58. Уст- рвйство 26 реверса содержит источник 59 для питания обмоток реле 56 и 57, который подключен одним концом к общей точке обмоток 56 и 57, а другим концом - к выходу устройства реверса 26, которое, в свою очередь, подключено к контакту 16 датчика крайних витков намотанного слоя. К входу устройства 26 реверса подключен выход регулятора 27 коэффициента передачи. Выход устройства 26 реверса соединен с вторым входом усилителя 19 каретки 8.
Регулятор 27 коэффициента переда- 41 (фиг.7) представляет собой делитель напряжения, выполненный на переменном резисторе 60, включенньй по схеме потенциометра.
Положение датчика потенциометра соответствует определенному коэффи- передачи сигнала, что, в свою очередь, соответствует опре- де.пенному шагу намотки (или диаметру наматываемого провода). Для удобства в работе регулятор 27 коэффициента передачи проградуи- рован в миллиметрах величины диаметра наматываемого привода.
Принцип работы станка заключается в следующем.
При вращении шпинделя 3 тахогене- ратор А вырабатывает сигнал постоянного тока-, который воздействует как отрицательная обратная связь через блок 7 управления шпинделя 3 на управляющую обмотку привода 5 шпинделя 3 и обеспечивает стабилизацию частоты вращения его. Аналогично осуществляется стабилизация частоты вращения привода каретки 8. При этом-выходной сигнал тахогенератора 20 через первый вход усилителя 19 каретки 8 воздействует на управлякмцую обмотку исполнительного элемента 21 каретки 8.
Для обеспечения режима слежения каретки 8 за движением шпинделя 3 второй вход усилителя 19 каретки 8 .соединен через устройство 26 реверса
0
5
0
5
0
5
0
5
0
5
и регулятор 27 коэффициента передачи с тахогенератором 4 шпинделя 3. Этим обеспечивается скоростная связь между шпинделем 3 и кареткой 8. Отношение скорости движения шпинделя 3 к скорости движения каретки 8 регулируется регулятором 27 коэффициента передачи. Автоматическое изменение направления движения каретки 8 при неизменном направлении вращения шпинделя 3 осуществляется с помощью устройства 26 реверса и контактов 22,16 и 23 датчика крайних витков намотанного слоя.
При намотке провода 2 на йаркас 1 возникает погрешность шага намотки, которая вызывается изменением диаметра провода в процессе намотки, а также Неточностью работы системы слежения по скорости.
Для компенсации погрешности, накап- ливаемой в процессе намотки катушки, в схеме предусмотрена автоматическая коррекция, при этом с помощью датчика 15 угла наклона провода 2 выраба- тьшается сигнал ошибки, который после преобразователя 17 интегрирующим элементом 18 воздействует на третий вход усилителя 19 каретки внося тем самым поправку на орибку.
Подготовка станка к намотке заключается в следующем.
Перед намоткой провода 2 для выбранной длины намотки устанавливаются в нужном диапазоне ползунки с контактами 22 и 23 так, чтобы контакт 16 касался контакта 22 н 23 в момент намотки крайнего левого или правого витков наматываемого слоя. Если намотку .выполняют, например, слева направо, то провод 2 закрепляют у края левой щечки каркаса 1 в точке пересечения перпендикуляра, опущенного из раскладывающего ролика 9 на ось каркаса 1 с его поверхности, при этом контакт 16, закрепленный на каретке 8, должен соприкасаться с контактом 22 ползун-;.. ка.
Замыкание контактов 16 и 22 приводит к подключению одной из обмоток устройства реверса 26 к источнику 59 питания, в результате переключа;ющие контакты 58 устройства 26 реверса установятся в положение, когда при вращении шпинделя 3 обеспечивается перемещение каретки 8 вправо.
С помощью переменного резистора 60 регулятора 27 коэффициента передачи
15
станавливается шаг намотки, соответ- твукщий наматываемому диаметру проода.
С помощью переменного резистора 37 устанавливается необходимая часто- та вращения шпинделя.
Станок работает следукицим образом.
При вращении шпинделя 3 с каркасом ) каретка 8 перемещается с заданным ю шагом намотки, равным диаметру провода, в результате провод 2 наматывается на каркас 1 виток к витку. По мере намотки провода вследствие накопления погрешности шага намотки изменяется угол г наклона провода 2 (у - угол, образованный между перпендикуляром, опущенным из раскладывающего ролика 9 на ось каркаса 1, и проводом 2, расположенным между раскладывающим роликом 9 и закрепленной точкой на каркасе 1), в результате чего провод 2 отклоняет от нейтрали изме- рительный рычаг 12 датчика 15 угла наклона провода, что приводит к воз- 25 никновению на выходе датчика 15 угла наклона провода сигнала рассогласования, который, воздействуя через преобразователь 17, интегрирующий элемент 18, усилитель 19 каретки 8 на управляющую обмотку привода 21 каретки 8, компенсирует накопленную пог решность шага намотки, в результате угол у поддерживается близким к нулю и тем самым поддерживает шаг намотки провода 2 в соответствии с диаметром наматываемого провода 2.
20
35
30
При намотке последнего крайнего витка первого наматываемого слоя замыкаются контакты 16 и 23, в результате каретка 8 изменяет направление движения и перемещается влево, увлекая за собой рычаг 12 датчика 15 угла наклона провода. При намотке пос- леднего крайнего витка второго наматываемого слоя замыкаются контакты 16 и 22, в результате каретка 8 меняет направление движения и перемещает15
ю 25274308
ся вправо. Далее процесс повторяется до заверщения намотки всей катушки.
Если при намотке провода 2 на каркас 1 по каким-либо причинам нарушается рядовость намотки, т.е. происходит сбой витков, то, так как это происходит за относительно короткое время, интегрирующий элемент 18 задерживает такой сигнал, в результате система управления от датчика 15 угла наклона провода не реагирует на кратковременное отклонение рычага 12, поэтому каретка 8 продолжает перемещаться с прежним неизменным шагом намотки , способствуя тем самым выходу ведущего витка наматываемого слоя из зоны сбоя.
Таким образом, если в процессе намотки катушки происходят местные сбои витков, то это не препятствует дальнейшему выполнение рядовой намотки, в результате коэффициент., заполнения катушки остается достаточно высоким.
20
Формула изобретения
. Станок для намотки электрических катушек, содержащий шпиндель с приводом его вращения, связанный с одним тахогенератором, каретку с приводом и устройством реверса, связанную с другим тахогенератором, регулятор коэффициента передачи, подключенный к тахогенератору шпинделя и к устройству реверса, и усилитель, первый вход которого подключен к тахогенера- тору каретки, а второй - к устройству реверса, о тличающийся.
тем, что, с целью повьш1ения качества намотки электрических катушек за счет повьш ения точности укладки витков провода, он снабжен интегрирующим элементом, преобразователем и датчиком
угла наклона провода, подключенным к преобразователю, при этом интегрирующий элемент подключен к преобразователю и третьему входу усилителя привода каретки.
29
33
1
30
3/
37
38
Omff
Фиъ. 2
J
-йUL
35
36
Фиг.З .
f
lA ЧН
Ж«в
От fS fput.tt
Отгв omzs отга Фи. S
лг
Ж 4/
От 16
Отгз
Фив.
«2ff
От
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| гельфишер (ФРГ), представленный на выставке Электро-82. | |||
