00
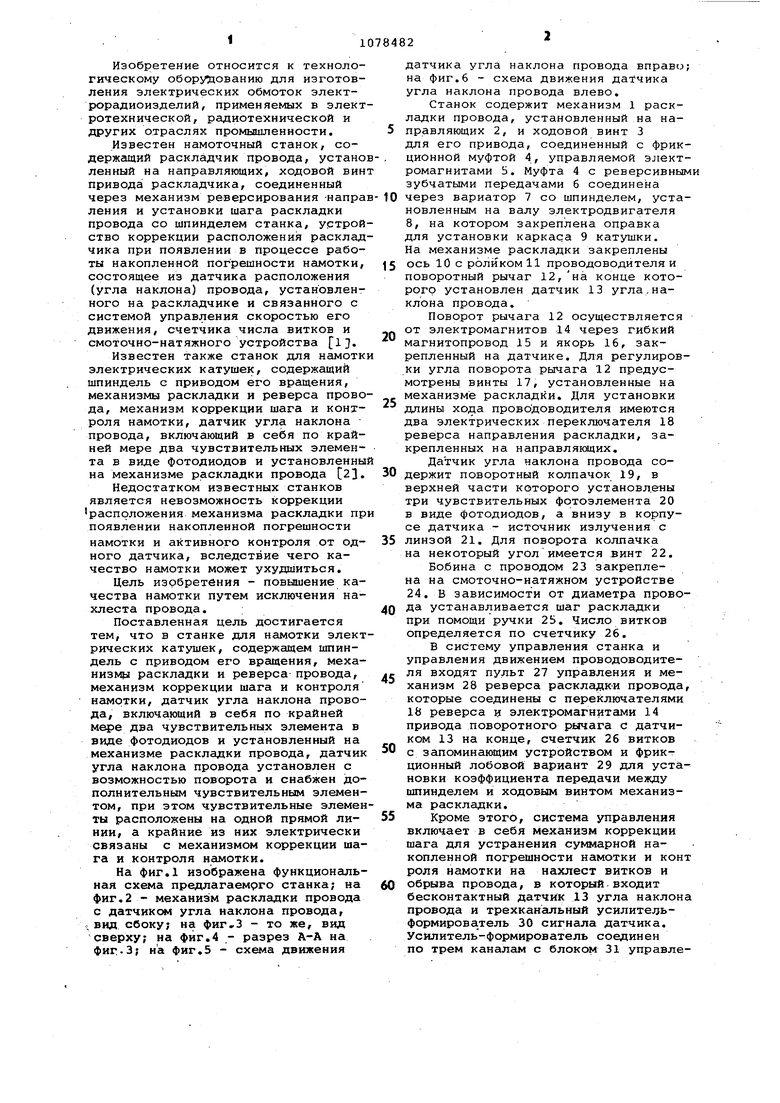
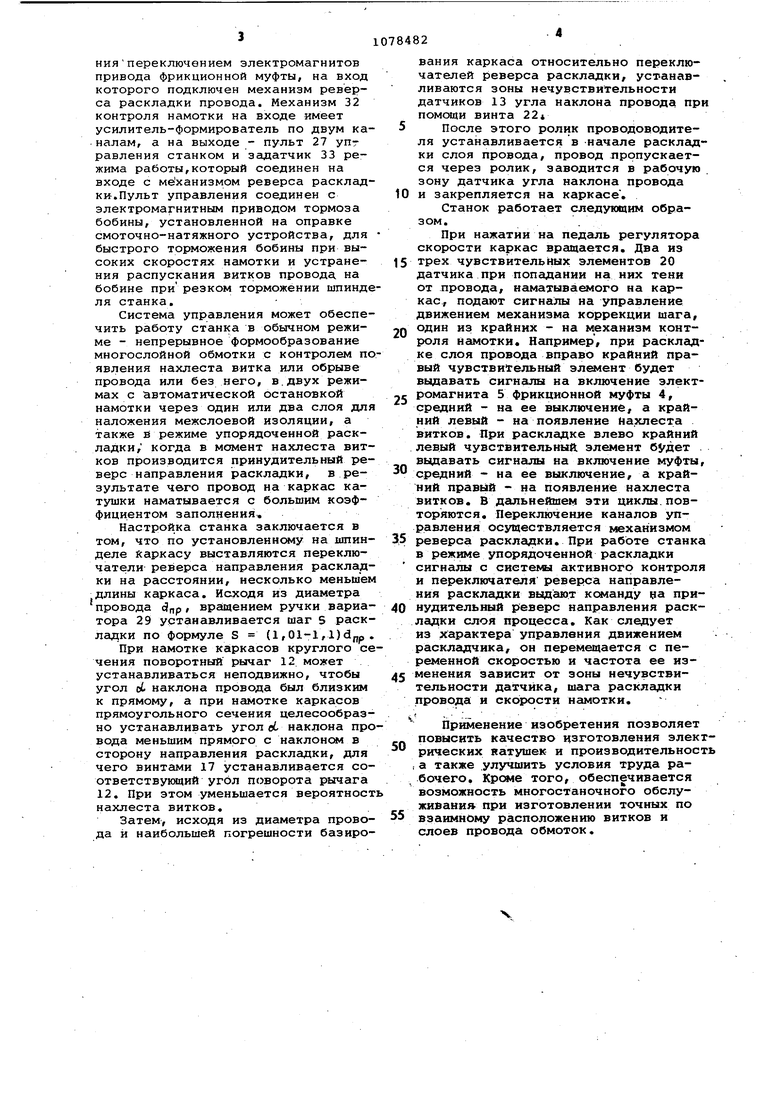
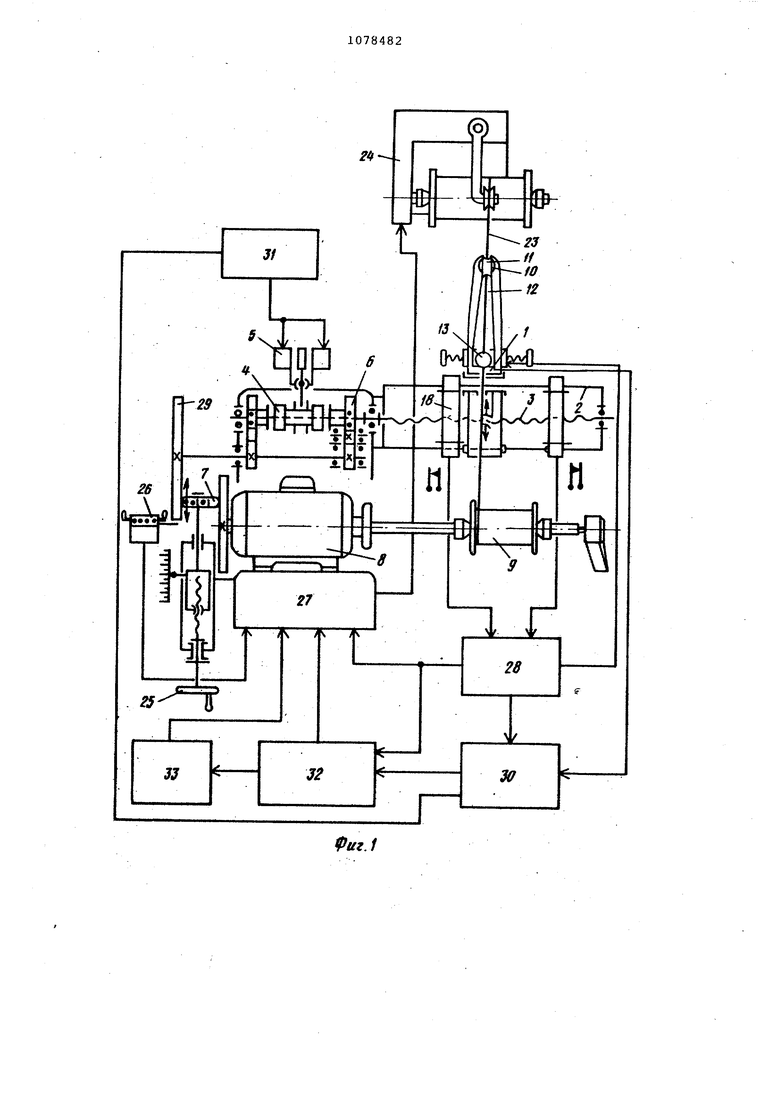
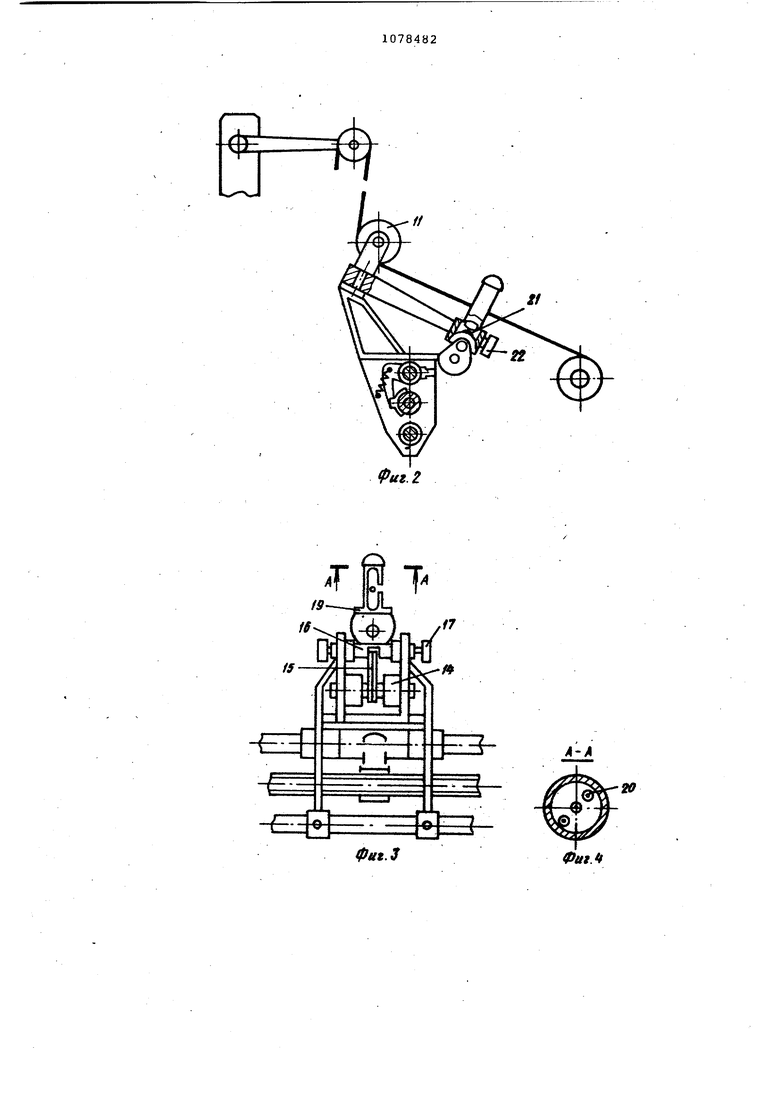
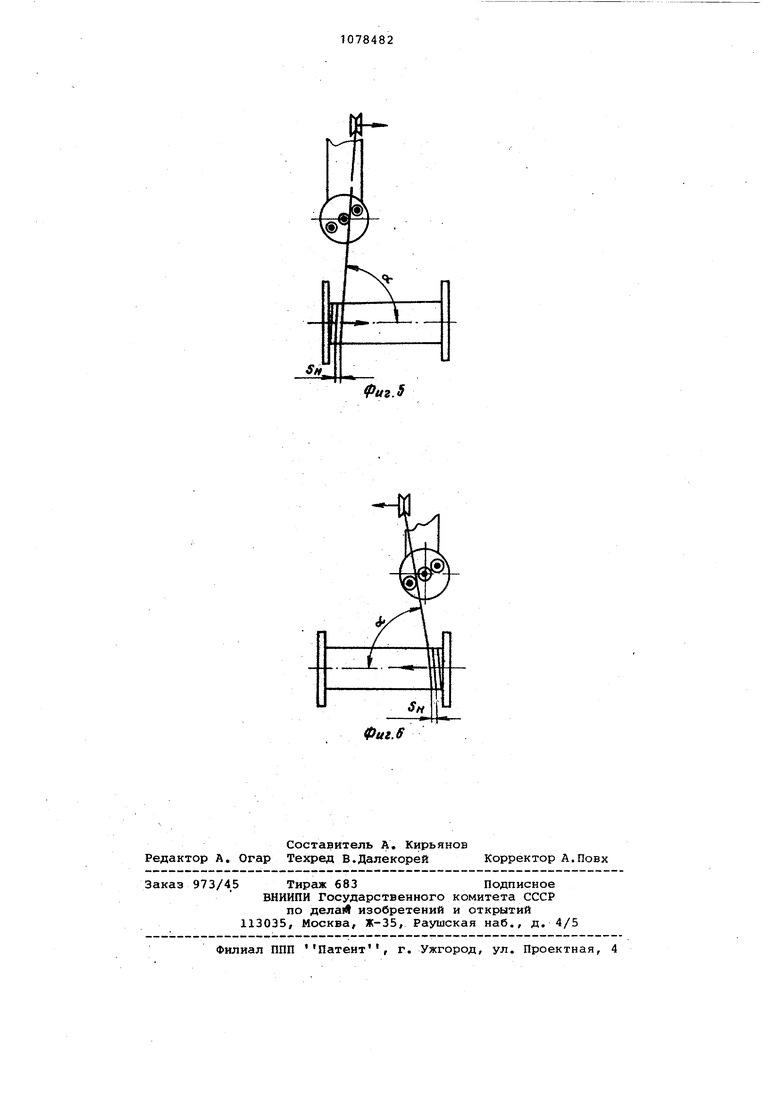
ос ю Изобретение относится к технологическому оборудованию для изготовления электрических обмоток электрорадиоизделий, применяемых в элект ротехнической, радиотехнической и других отраслях промьшшенности. Известен намоточный станок, содержгиций раскладчик провода, уставо ленный на направляющих, ходовой вин привода раскладчика, соединенный через механизм реверсирования -напра ления и установки шага раскладки провода со шпинделем станка, устрой ство коррекции расположения расклад чика при появлении в процессе работы накопленной погрешности намотки, состоящее из датчика расположения (угла наклона) провода, установленного на раскладчике и связанного с системой управления скоростью его движения, счетчика числа витков и смоточно-натяжного устройства f1}. Известен также станок для намотк электрических катушек, содержащий шпиндель с приводом его вращения, механизмы раскладки и реверса прово да, механизм коррекции шага и контроля намотки, датчик угла наклона провода, включающий в себя по крайней мере два чувствительных элемента в виде фотодиодов и установленны на механизме раскладки провода 23. Недостатком известных станков является невозможность коррекции расположения механизма раскладки пр появлении накопленной погрешности намотки и активного контроля от одного датчика, вследствие чего качество намотки может ухудшиться. Цель изобретения - повышение качества намотки путем исключения нахлеста провода. Поставленная цель достигается тем, что в станке для намотки элект рических катушек, содержащем шпиндель с приводом его вращения, механизму раскладки и реверса провода, механизм коррекции шага и контроля намотки, датчик угла наклона провода, включающий в себя по крайней мере два чувствительных элемента в виде фотодиодов и установленный на механизме раскладки провода, датчик угла наклона провода установлен с возможностью поворота и снабжен дополнительным чувствительным элементом, при этом чувствительные элемен ты расположены на одной прямой линии, а крайние из них электрически связаны с механизмом коррекции шага и контроля намотки. На фиг.1 изображена функциональная схема предлагаемрго станка; на фиг.2 - механизм раскладки провода с датчиком угла наклона провода, ; вид сбоку; на фиг.З - то же, вид сверху; на фиг.4 - разрез А-А на фиг-З; на фиг.5 - схема движения датчика угла наклона провода вправо; на фиг.6 - схема движения датчика угла наклона провода влево. Станок содержит механизм 1 раскладки провода, установленный на направляющих 2, и ходовой винт 3 для его привода, соединенный с фрикционной муфтой 4, управляемой электромагнитами 5. Муфта 4 с реверсивными зубчатыми передачами б соединена через вариатор 7 со шпинделем, установленным на валу электродвигателя 8, на котором закреплена оправка для установки каркаса 9 катушки. На механизме раскладки закреплены ось 10 с роликом 11 проводоводителяи поворотный рычаг 12,на конце которого установлен датчик 13 угла,наклона провода. Поворот рычага 12 осуществляется от электромагнитов 14 через гибкий магнитопровод 15 и якорь 16, закрепленный на датчике. Для регулировки угла поворота рычага 12 предусмотрены винты 17, установленные на механизме раскладки. Для установки длины хода проводоводителя имеются два электрических переключателя 18 реверса направления раскладки, закрепленных на направляющих. Датчик угла наклона провода содержит поворотный колпачок 19, в верхней части которого установлены три чувствительных фотоэлемента 20 в виде фотодиодов, а внизу в корпусе датчика - источник излучения с линзой 21. Для поворота колпачка на некоторый угол имеется винт 22. Бобина с проводом 23 закреплена на смоточно-натяжном устрюйстве 24. В зависимости от диаметра провода устанавливается шаг раскладки при помощи ручки 25. Число витков определяется по счетчику 26. В систему управления станка и управления движением проводоводителя входят пульт 27 управления и механизм 28 реверса раскладк-и провода, которые соединены с переключателями 18 реверса и электромагнитами 14 привода поворотного рычага с датчиком 13 на конце, счетчик 26 витков с запоминающим устройством и фрикционный лобовой вариант 29 для установки коэффициента передачи между шпинделем и ходовым винтом механизма раскладки. Кроме этого, система управления включает в себя механизм коррекции шага для устранения суммарной накопленной погрешности намотки и конт роля намотки на нахлест витков и обрыва провода, в который входит бесконтактный датчик 13 угла наклона провода и трехканальный усилительФормирователь 30 сигнала датчика. Усилитель-формирователь соединен по трем каналам с блоком 31 управленияпереключением электромагнитов привода фрикционной муфты, на вход которого подключен механизм реверса раскладки провода. Механизм 32 контроля намотки на входе имеет усилитель-формирователь по двум каналам, а на выходе - пульт 27 управления станком и эадатчик 33 режима работы,который соединен на входе с механизмом реверса раскладки.Пульт управления соединен с электромагнитным приводом тормоза бобины, установленной на оправке смоточно-натяжного устройства, для быстрого торможения бобины при высоких скоростях намотки и устранения распускания витков провода, на бобине при резком торможении шпинделя станка.
Система управления может обеспечить работу станка в обычном режиме - непрерывное формообразование многослойной обмотки с контролем появления нахлеста витка или обрыве провода или без него, в.двух режимах с автоматической остановкой намотки через один или два слоя для наложения межслоевой изоляции, а также в режиме упорядоченной раскладки, когда в момент нахлеста витков производится принудительный реверс направления раскладки, в результате чего провод на каркас катушки наматывается с большим коэффициентом заполнения.
Настройка станка заключается в том, что по установленному на шпинделе йаркасу выставляются переключатели- реверса направления раскладки на расстоянии, несколько меньшем Jдлины каркаса. Исходя из диаметра провода пр, вращением ручки вариатора 29 устанавливается шаг 5 раскладки по формуле S (1,01-l,l),
При намотке KaipKacoB круглого сечения поворотный рычаг 12 может устанавливаться неподвижно, чтобы угол ot наклона провода был близким к прямому, а при намотке каркасов прямоугольного сечения целесообразно устанавливать угол ei- наклона провода меньшим прямого с наклоном в сторону направления раскладки, для чего винтами 17 устанавливается соответствующий угол поворота рычага 12. При этом уменьшается вероятност нахлеста витков.
Затем, исходя из диаметра провода и наибольшей погрешности базирования каркаса относительно переключателей реверса раскладки, устанавливаются зоны нечувствительности датчиков 13 угла наклона провода при помощи винта 22
5 После этого ролик проводоводителя устанавливается в -начале раскладки слоя провода, провод пропускается через ролик, заводится в рабочую зону датчика угла наклона провода
0 и закрепляется на каркасе.
Станок работает следующим образом.
При нажатии на педаль регулятора скорости каркас вращается. Два из
5 трех чувствительных элементов 20 датчика при попадании на них тени от провода, наматываемого на каркас, подают сигналы на управление движением механизма коррекции шага,
Q один из крайних - на механизм контроля HciMOTKH. Например, при раскладке слоя провода вправо крайний правый чувствительный элемент будет выдавать сигналы на включение электс ромагнита 5 фрикционной муфты 4, средний - на ее выключение, а крайний левый - на появление Нахлест:а витков. При раскладке влево крайний левый чувствительный элемент будет . выдавать сигналы на включение муфты,
средний - на ее выключение, а крайний правый - на появление нахлеста витков. В дальнейшем эти циклы.повторяются. Переключение каналов управления осуществляется механизмом
5 реверса раскладки. При работе станка в режиме упорядоченной раскладки сигналы с системы активного контроля и переключателя реверса направления раскладки выдают команду при0 нудительный реверс направления раскладки слоя процесса. Как следует из характера управления движением раскладчика, он перемещается с переменной скоростью и частота ее из5 менения зависит от зоны нечувствительности датчика, шага раскладки провода и скорости намотки.
Применение изобретения позволяет повысить качество изготовления электрических катушек и производительность ,а также .улучшить условия труда рабочего. Креме того, обеспечивается возможность многостаночного обслуживания при изготовлении точных по 55 взаимному расположению витков и слоев провода обмоток.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПРОВОДА ПРИ НАМОТКЕ | 1992 |
|
RU2024089C1 |
| Раскладчик провода | 1988 |
|
SU1534528A1 |
| Станок для намотки электрических катушек | 1973 |
|
SU597014A1 |
| Раскладчик провода | 1988 |
|
SU1603448A1 |
| Раскладчик провода | 1983 |
|
SU1138844A1 |
| Станок для намотки электрических катушек | 1977 |
|
SU743051A2 |
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU866594A1 |
| Станок для намотки электрических катушек | 1982 |
|
SU1108518A1 |
| Стенд для испытания системы управления намоточных станков | 1987 |
|
SU1483500A1 |
ДЛЯ НАМОТКИ ЭЛЕКТРИЧЕСКИХ КАТ5П11ЕК, содержащий шйиндель с приводом его вращения, механизмы раскладки и реверса провода, механизм коррекции шага и контроля намотки, датчик угла наклона провода, включающий в себя по крайней мере два чувствительных элемента в виде фотодиодов и установленный на механизме раскладки провода, о т л и чающийся тем, что, с целью повышения качества намотки путем исключения нахлеста провода, датчик угла наклона провода установлен с возможностью поворота и снабжен дополнительным чувствительным элементом, при этом чувствительные элементы расположены на одной прямой линии, а крайние из них электрически связаны с механизмом коррекции шага и контроля намотки.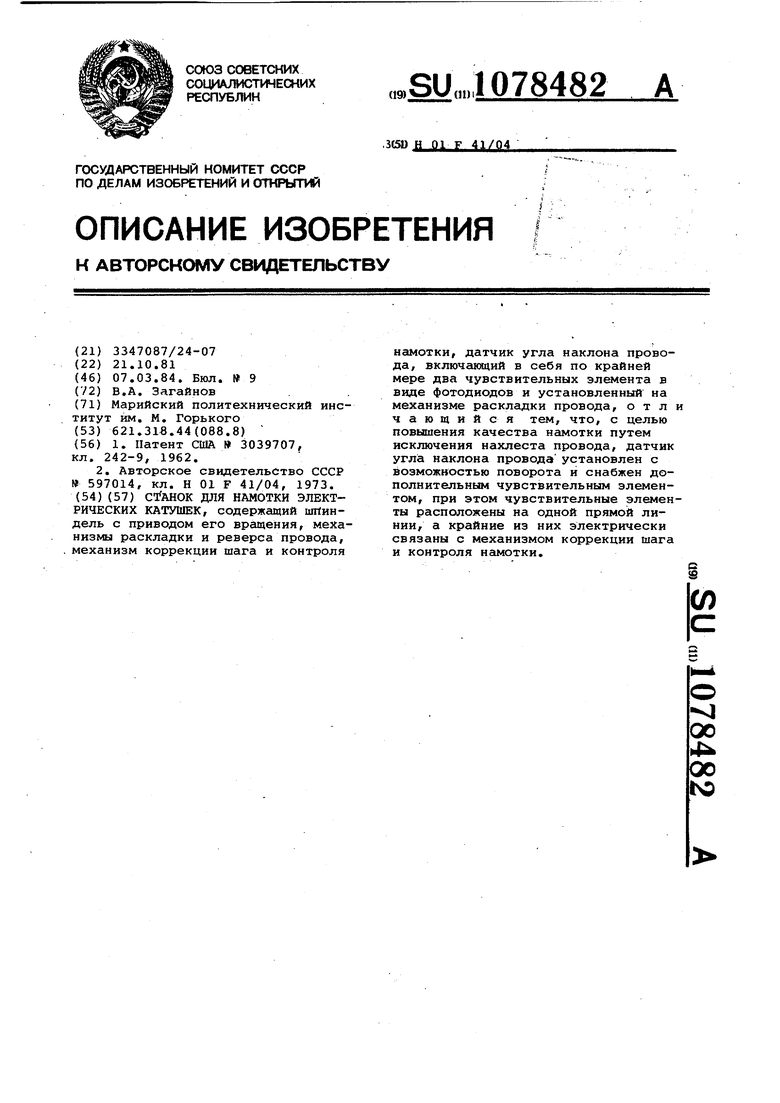
КК
20
Фиг.If
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3039707, кл | |||
| Металлические подъемные леса | 1921 |
|
SU242A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Станок для намотки электрических катушек | 1973 |
|
SU597014A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
