(54) СТАНОК ДЛЯ НАМОТКИ ЭЛЕКТРИЧЕСКИХ КАТУШЕК

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки электрических катушек | 1977 |
|
SU743051A2 |
| Станок для намотки электрических катушек | 1979 |
|
SU866594A1 |
| Станок для намотки электрических катушек | 1979 |
|
SU871238A1 |
| Станок для намотки электрических катушек | 1981 |
|
SU1078482A1 |
| Станок для намотки электрических катушек | 1986 |
|
SU1427430A1 |
| Станок для намотки обмоток электрических катушек | 1980 |
|
SU1023418A1 |
| Стенд для испытания системы управления намоточных станков | 1987 |
|
SU1483500A1 |
| СТАНОК ДЛЯ РЯДОВОЙ НАМОТКИ КАТУШЕК | 1973 |
|
SU370660A1 |
| Станок для намотки электрических катушек | 1983 |
|
SU1150667A1 |
| УСТРОЙСТВО ДЛЯ РАСКЛАДКИ ПРОВОДА ПРИ НАМОТКЕ | 1992 |
|
RU2024089C1 |

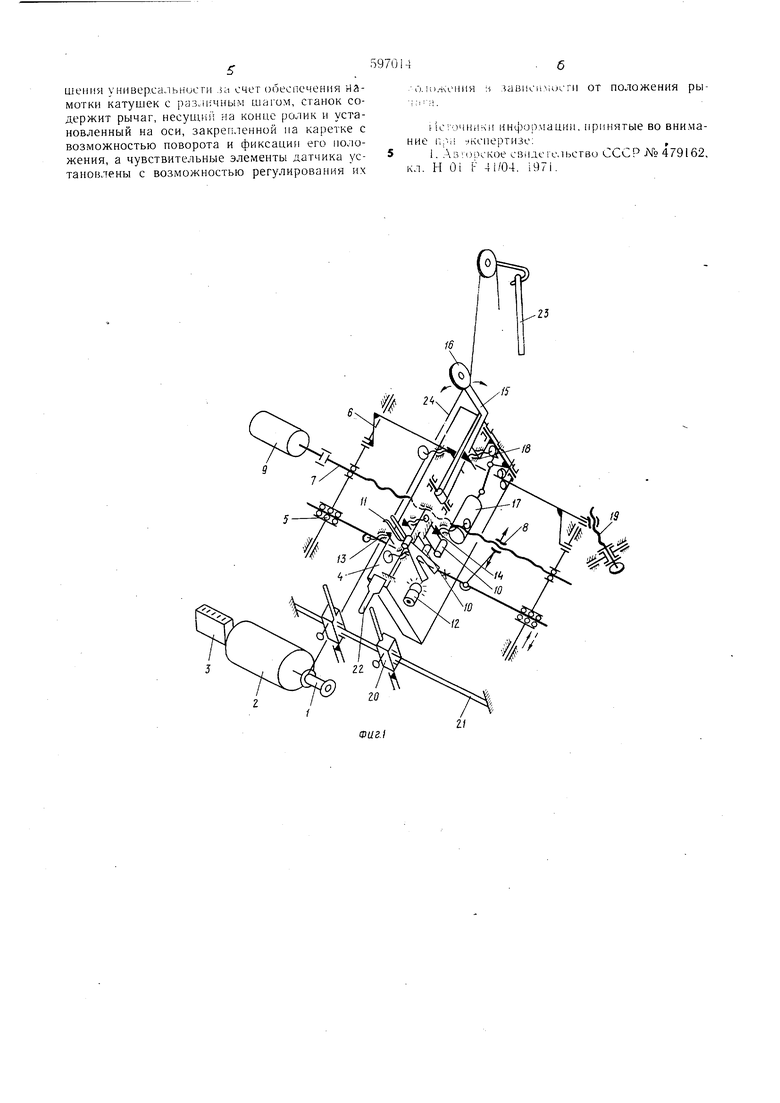
Изобретение относится к технологическому оборудованию для изготовления электрических катушек и может быть применено в радиотехнической, электротехнической и других отраслях промышленности. Известен станок для намотки электрических катушек, содержаш,ий шпиндель для установки каркаса наматываемой катушки, привод шпинделя, каретку проводоводителя, связанную с хо710Бым вннтом,установленнь1е на каретке ролик для направления привода и датчик утла наклона провода, связанный с системой управления приводом ХОДОВОГО винта каретки, счетчик числа витков Г. Однако это устройство не позволяет получить шаг раскладки, отличный от шага, равного диаметру наматываемого провода, т. е. не обеспечивает намотку катушек с различным inaroM. Целью изобретения является повышение универсальности станка за счет обеспечения намотки катушек с различным шагом. Поставленная цель достигается тем, что станок содержит рычаг, несуш.ий на конце ролик и установленный на оси, закрепленной на каретке с возможностью поворота и фиксации его положения, а чувствительн1,1е элементы датчика угла наклона провода установлены с возможностью регулирования их положения в зависимости, от положения рычага. На фиг. 1 дана кинематическая схема станка для намотки; на фиг. 2 - блок-схема устройства управления станком; на фиг. 3 - блоксхема устройства активного контроля качества раскладки. Станок содержит шпиндель 1 для установки каркаса наматываемой катушки, электродвигатель 2 для привода шпинделя, счетчик 3 числа витков с запоминаюшим устройством, каретку 4 с направляюшими 5 и 6, ходовой винт 7, гайку 8, закрепленную на каретке, электродвигатель 9 для привода ходового винта каретки. Датчик угла наклона провода установлен на каретке и содержит чувствительные элементы 10 (например, два фотоэлемента), расположенные на упругой подвеске, вилочку 11 со шторкой, расположенные на упругой струне, лампочку 12, и регулируемые упоры 13 для ограничения угла поворота вилочки со шторкой. Регулируемые упоры 14 предназначены для изменения положения чувствительных элементов датчика в зависимости от положения рычага 15, несущего на конце ролик 16 и установленного на оси, закрепленной на каретке с возможностью поворота и фиксации его положения в зависимости от требуемого шага наМОТКИ при помощи 9.1ектр()магнита 17, систем) тяг и регулируемых упоров 18. Винт 19 служит для регулирования положения каретки в зависи.мости от диаметра каркаса. Конечные переключатели 20 предназначены для реверсирования направления раскладки и установлены на направляющих 21. Упор 22 расположен на каретке и взаимодействует с конечными переключателями. Натяжное устройство 23 служит для поддержания постоянства натяжения провода 24. Датчик угла наклона провода соединен с электронны.м усилителем 25, к которому через механизм 26 реверса направления раскла.1ки подключен электродвигатель 9. К выходу усилителя подключено устройство 27 для активного контроля качества раскладки, связанное с пультом 28 для управления приводом шпинделя. Пульт 29 соединен с устройством активного контроля и пультом 28. Автотрансфор.матор 30 предназначен для регулирования скорости вращения электродвигателя 2. Устройство активного контроля качества раскладки провода содержит реле 31 мини.мального тока (или устройство сравнения), вход которого соединен с выходом электронного усилителя 25 через регулируемое сопротивление 32. с пультом 29, источником тока 33 через pery.iHpye.vioe сопротивление 34 и реле 35 блокировки. Выход реле .минимального тока соединен с нультом 28 управления приводом щпинделя, источнико.м тока и реле блокировки. Источник тока 33 и реле 35 блокировки соединены через клем.мы 36 и 37 с двумя конечными переключателями реверса направления раскладки. Станок работает следующим образом. Перед началом намотки провод 24 от натяжного устройства 23 через ролик 16 вводят в и закрепляют на каркасе прорезь вилочкн (например, с левой стороны). Уноры 18 устанавливают на расстоянии друг от друга, соответствующем заданному углу наклона провода, однозначно завнсящи.м от требуе.мого шага раскладки. Станок включают, нажк.мая кнопку на пульте 29. При натяжении провода и нахождении рычага 15 в левом положении каретка 4, перемещаясь влево, переключает ле.вый переключатель 20 и останавливается. При этом рычаг 15 переводится с помощью электромагнита 17 и системы тяг в правое положение до упора, тем самым обеспечивая заданный угол наклона провода. Электродвигатель 2 включают и производят на.1отку на каркас. При изменении угла наклона провода, т. е. отклонении его от заданного, вилочка со шторкой поворачивается на упругой подвеске и изменяет освещенность фотоэлемента одного из каналов датчика угла наклона провода, следовательно, ток, проходя через усилитель 25, механизм реверса 26, через обмотку якоря электродвигателя 9 изменяет скорость его вращения, в результате чего изменяется скорость движения каретки таким образо.м, чтобы угол наклона провода был постоянным. По окончании на.мотки первого слоя в .момент реверса упор каретки нажимает на правый конечный переключатель 20 реверса направления раекладки. При этом переключаются каналы прохождения сигналов датчика, меняется полярность якоря электродвигателя 9, привода ходового винта каретки, а рычаг 15 переводится в левое положение до упора в винт (IBj. В период переходного процесса реверса каретка остается неподвижной до тех пор, пока угол наклона провода не достигнет заданного значения, после чего каретка начинает движение в противоположную сторону. TaKH.vi образом повторяют движение элементов станка до окончания на.мотки . Б процессе намотки производят активный контроль расположения витков относительно друг друга (появление нахлеста витка на виток; и обрыва провода. В начале намотки, как только угол наклона провода достигнет заданного, на выходе усилителя 25 (фиг. 3) появляется ток, величина которого соответствует нор.мальному режиму намотки, который в сумме с током от источника 33, включенного переключателем реверса, обеспечивает включение реле 31 мини.мального тока, которое в свою очередь, отключает реле блокировки 35 и источник тока 33. Реле 31 удерживается во включенном состоянии номинальны.м током с выхода усилителя. При появлении нахлеста витка на виток угол наклона изменяется, и ток на выходе усилителя становится меньще тока отключения реле 31. В результате этого реле 31 отключается, и появляется сигнал на останов станка. Прн обрыве провода под действием упругой подвески ви.точка со шторкой устанавливается в нейтральное положение, при котором реле 31 отключается, и станок останавливается. При необходимости реле 31 минимального тока .vюжeт быть включено с помощью пульта 29. При переходном периоде реверса направ я раскладки прохождение сигнала на останов станка на пульт 28 управления приводом щпинделя блокируют с по.мощью реле 35 блокировки, включае.мого переключателями реверса направления раскладки и отключаемого реле 3 минимального тока. Станок позволяет производить .многослойную намотку катущек как виток к витку, так и с щагом, больншм диаметра провода с высоким качеством формообразования обмотки по взаимно.му расположению витков и коэффициенту заполнения обмоточного объема. Особенно эффективно применение станка для намотки микропровода на плоские и круглые каркасы при достаточно высокой производительности. Формула изобретения Станок для на.мотки электрических катушек, содержащий шпиндель для установки каркаса наматываемой катушки, привод шпинделя, каретку проводоводителя, связанную с ходовым винтом, установленные на каретке ролик для направления провода и датчик угла наклона провода, связанный с системой управления приводом ходового Бннта каретки, счетчик числа витков, отличающийся те.м, что, с целью повыщения универ.са.льнисги за счет обеспечения намотки катушек с различным шагом, станок содержит рычаг, несущий на конце ролик и установленный на оси, закрепленной па каретке с возможностью поворота и фиксации его положения, а чувствительные элементы датчика установлены с возможностью регулирования их
ожеиия :i завпсимиеги от положения ры/югочиякп информации, принятые во внимание i-,p.ii :)Ксиертизе;
23
/9
Фиг.1
ЛЖооооооо -1
JO
(Риг. г
Фиг.З
