Изобретение относится к подъемно- транспортной технике а именно к гру- З озахватным устройствам.
Целью изобретения является расширение эксплуатационных возможностей путем обеспечения отделения груза от основания, скрепленного с ним.
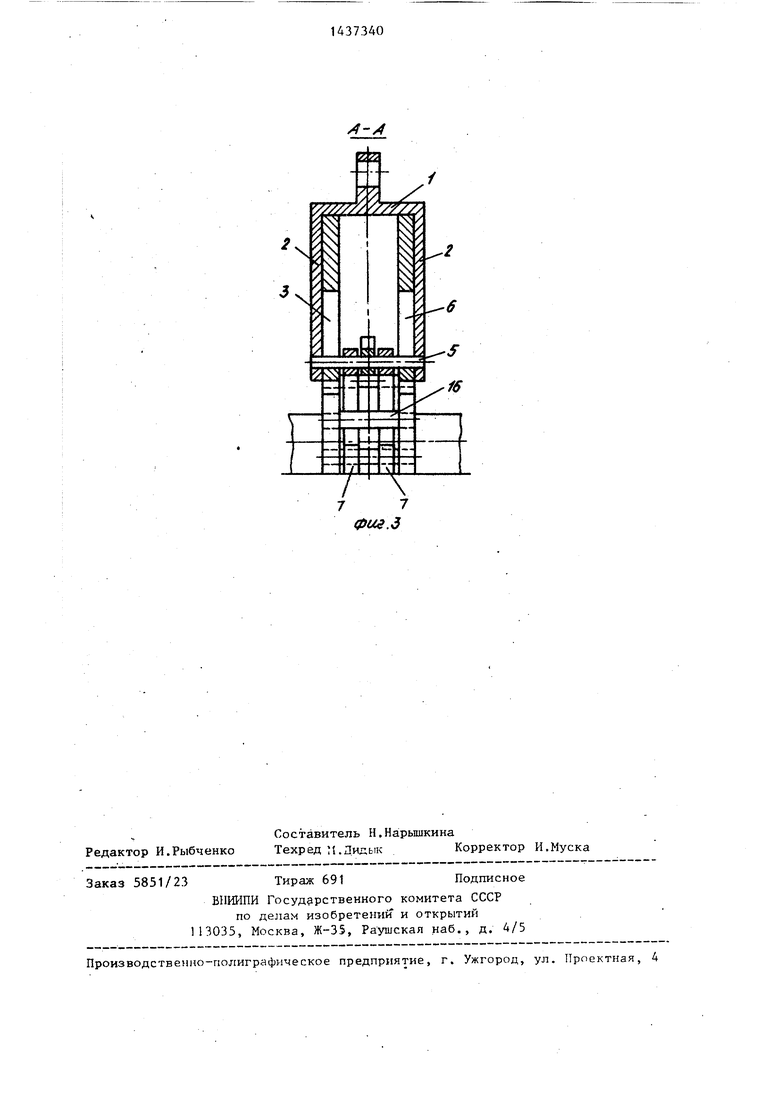
На фиг. 1 показано грузозахватное устройство, общий вид, в положении Аеред захватом груза; на фиг. 2 - то е, в положении захвата груза; на фиг. 3 - сечение А-А на фиг. 1. I Грузозахватное устройство содержи Направляющий элемент 1 со стенками 2, в которых установлен П-образный йесутдий элемент, образованный двумя 1;4ассивными параллельно распололсенны- Ми щеками 3 для размещения груза 4. Ь стенках. 2 направляющего элемента i закреплена горизонтальная ось 5, а fe щеках 3 П-образного элемента вьшал Нены продольные пазы 6 для перемещения горизонтальной оси 5. На оси 5 йежду щеками 3 размещены двуплечие ахватные рычаги-7, взаимодействующи С горизонтальной осью 5 посредством Продольных пазов 8, выполненных на верхних плечах 9 рычагов- 7. Рабочие
элементе 1 шарнирно установлен замок 17, взаимодействующий с планкой 18, жестко установленной между щеками 3. Дли закрепления устройства на грузоподъемном механизме корпус 1 имеет хомут 19.
.Грузозахватное устройство работает следующим образом,
Перед началом работы грузозахватное устройство за хомут 19 навешивают на любое известное грузоподъемное средство, например на стрелу передвижного грузоподъемного крана. В
исходном положении щеки 3 утоплены в направляющем элементе 1 и зафиксированы в этом положении замком 17, удерживающим щеки 3 в направляющем элементе 1 через планку 18, при зтом
поверхности 11 захватньпс рычагов 7 разведены. В зтом положен : устройство опускают на пол вагона, при этом груз - брус 4 - расположен в щеках 3. Оператор отводит в сторону
замок 17 и дает команду на подъем устройства.
В начале подъема щеки 3 остаются на полу вагона, а направляющий элемент 1 поднимается относительно не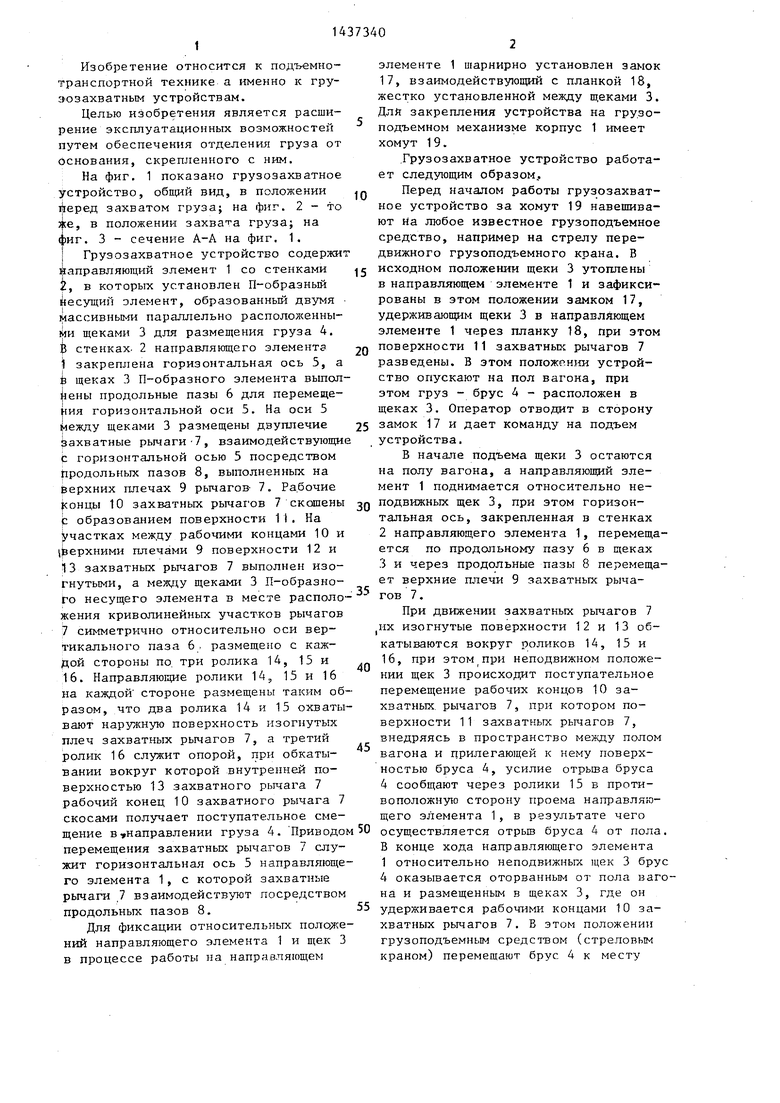
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1985 |
|
SU1393747A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| Грузозахватное устройство | 1990 |
|
SU1736899A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Грузозахватное устройство | 1991 |
|
SU1789493A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1990 |
|
SU1710484A1 |
Изобретение относится к подъемно-транспортной технике, в частности к.грузозахватным устройствам. Целью изобретения является расширение эксплуатационных возможностей путем обеспечения отделения груза от основания, скрепленного с ним. Грузозахватное устройство содержит П-образный несущий элемент с роликами, два первьк из которых (14, 15) закреплены соответственно в верхних и нижних частях вертикальных полок П-образного несущего элемента для взаимодействия с наружными поверхностями изогнутых плеч захватных рычагов 7, а третьи ролики 16 расположены между роликами 14, 15 для взаимодействия с внутренними поверхностями изогнутых плеч захватных рычагов 7. 3 ил. сл f9 .4;:) со -sj со 4
35
сонды 10 захватных рычагов 7 скошены зо подвижных щек 3, при этом горизон- р образованием поверхности 11. На Участках между рабочими концами 10 и ферхними плечами 9 поверхности 12 и 13 захватных рычагов 7 выполнен изогнутыми, а между щеками 3 П-образного несущего элемента в месте расположения криволинейных участков рычагов 7 симметрично относительно оси вертикального паза 6, размещено с каждой стороны по. три ролика 14, 15 и 16. Направляющие ролики 14, 15 и 16 на каждой стороне размещены таким образом, что два ролика 14 и 15 охватывают нару5 сную поверхность изогнутых плеч захватных рычагов 7, а третий ролик 16 служит опорой, при обкатывании вокруг которой внутренней поверхностью 13 захватного рычага 7 рабочий конец 10 захватного рычага 7 скосами получает поступательное сме40
45
тальная ось, закрепленная в стенках
2направляющего элемента 1, перемещается по продольному пазу 6 в щеках
3и через продольные пазы 8 перемещает верхние плечи 9 захватных рычагов 7.
При дврсжении захватных рычагов 7 |Их изогнутые поверхности 12 и 13 обкатываются вокруг роликов 14, 15 и 16, при неподвижном положении щек 3 происходит поступательное перемещение рабочих концов 10 захватных, рычагов 7, при котором поверхности 11 захватных рычагов 7, внедряясь в пространство между полом вагона и црилегающей к нему поверхностью бруса 4, усилие отрьша бруса
4сообщают через ролики 15 в противоположную сторону проема направляющего элемента 1, в результате чего
щение в направлении груза 4. Приводом 50осуществляется отрьш бруса 4 от пола.
перемещения захватных рычагов 7 слу-В конце хода направляющего элемента
жит горизонтальная ось 5 направляюще-1 относительно неподвижных щек 3 брус
го элемента 1, с которой захватные4 оказывается оторванным от пола нагорычаги 7 взаимодействуют посредствомна и размещенным в щеках 3, где он
продольных пазов 8.55удерживается рабочими концами 10 заДля фиксации относительных полоя е- ний направляющего элемента 1 и щек 3 в процессе работы на направляющем
хватных рычагов 7. В этом положении грузоподъемным средством (стреловым краном) перемещают брус 4 к месту
подвижных щек 3, при этом горизон-
тальная ось, закрепленная в стенках
2направляющего элемента 1, перемещается по продольному пазу 6 в щеках
3и через продольные пазы 8 перемещает верхние плечи 9 захватных рычагов 7.
При дврсжении захватных рычагов 7 Их изогнутые поверхности 12 и 13 обкатываются вокруг роликов 14, 15 и 16, при неподвижном положении щек 3 происходит поступательное перемещение рабочих концов 10 захватных, рычагов 7, при котором поверхности 11 захватных рычагов 7, внедряясь в пространство между полом вагона и црилегающей к нему поверхностью бруса 4, усилие отрьша бруса
4сообщают через ролики 15 в противоположную сторону проема направляющего элемента 1, в результате чего
осуществляется отрьш бруса 4 от пола.
хватных рычагов 7. В этом положении грузоподъемным средством (стреловым краном) перемещают брус 4 к месту
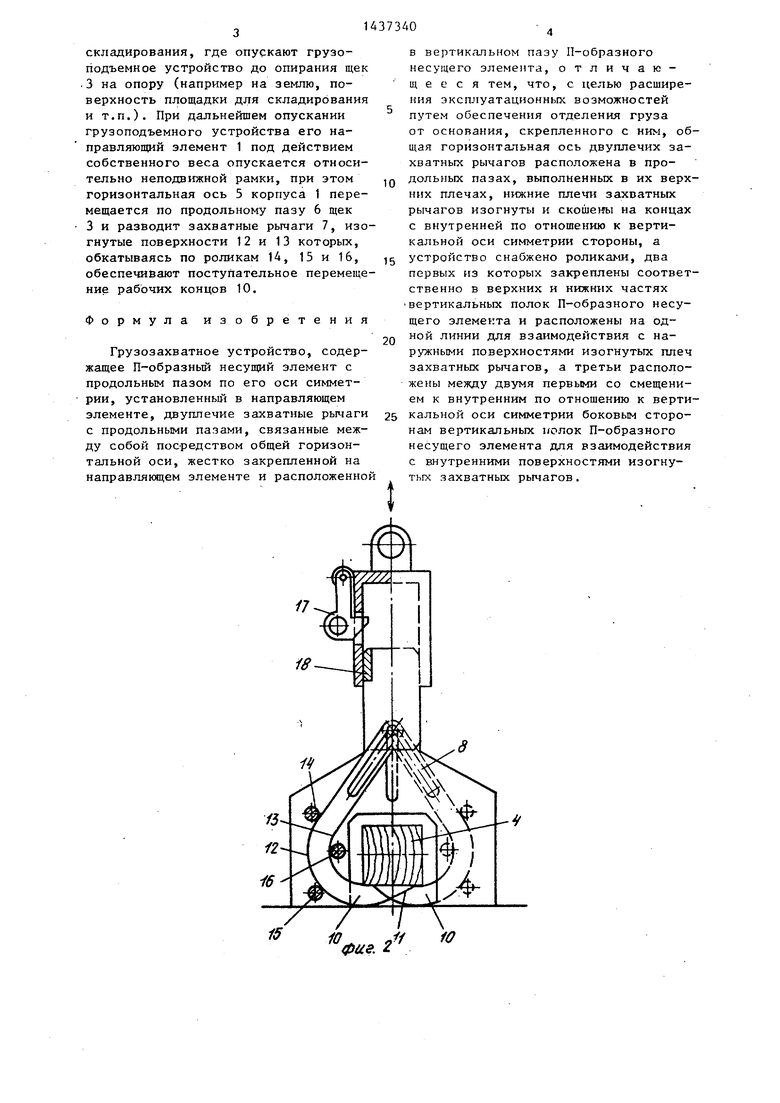
складирования, где опускают грузоподъемное устройство до опирания щек . 3 на опору (например на землю, поверхность площадки для складирования и т.п.). При дальнейшем опускании грузоподъемного устройства его направляющий элемент 1 под действием собственного веса опускается относительно неподвижной рамки, при этом горизонтальная ось 5 корпуса 1 перемещается по продольному пазу 6 щек 3 и разводит захватные рычаги 7, изогнутые поверхности 12 и 13 которых, обкатываясь по роликам 14, 15 и 16, обеспечивают поступательное перемещение рабочих концов 10.
Формула изобретения
Грузозахватное устройство, содержащее П-образный несущий элемент с продольным пазом по его оси симметрии, установленньш в направляющем элементе, двуплечие захватные рычаги с продольными пазами, связанные между собой посредством общей горизонтальной оси, жестко закрепленной на направляющем элементе и расположенно
/7
V.. /
0
5
5
в вертикальном пазу П-образного несущего элемента, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения отделения груза от основания, скрепленного с ним, общая горизонтальная ось двуплечих захватных рычагов расположена в продольных пазах, выполненных в их верхних плечах, нижние плечи захватньк рычагов изогнуты и скошет 1 на концах с внутренней по отношению к вертикальной оси симметрии стороны, а устройство снабжено роликами, два первых из которых закреплены соответственно в верхних и нижних частях вертикальных полок П-образного несущего элемента и расположены на одной линии для взаимодействия с наружными поверхностями изогнутых плеч захватных рычагов, а третьи расположены между двумя первыми со смещением к внутренним по отношению к вертикальной оси симметрии боковым сторонам вертикальных полок П-образного несущего элемента для взаимодействия с внутренними поверхностями изогнутых захватных рычагов.
-f
10
I
7 7
Фие.З
| Грузозахватное устройство | 1976 |
|
SU624867A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
