Фие.2
Изобретение относится к грузозахватным устройствам, в частности к захватным головкам манипуляторов, предназначенным для подьемно-трзнспортных операций с партиями объектов одинакоього размера, ориентируемых в зоне захвата.
Известно захватное устройство, содержащее шарнирно установленные на корпусе захватные рычаги с пазами, в которых размещены пальцы, жестко связанные со штоком силового цилиндра привода, и средство фиксации захватных рычагов в закрытом положении.
Недостатком известного устройства является низкая надежность захвата, обусловленная тем, что масса поднятого объекта висит на штоке силового цилиндра и при перемещении объекта за счет инерционных сил стремится изогнуть шток и деформировать его направляющие элементы, кроме того, поднятый объект ничем, кроме сил трения, не фиксируется, т.е. может выскользнуть между захватами, например при перемещении в направлении, параллельном захвл гным губкам, что снижает надежность захвата объекта и не позволяет увеличить скорость его перемещения.
Известно грузозахватное устройство, содержащее каретку с рамой, силовой вертикальный пневмоцилиндр, захватные рычаги, механизм сведения рычагов - горизонтальный пневмоцилиндр, захватные элементы и систему управления.
Недостатком известного устройства является низкая надежность захвата, обусловленная тем, что вся масса поднятого объекта и самой захватной головки устройства висит на штоке силового цилиндра, ко- торый воспринимает все нагрузки от возникающих инерционных сил при перемещении объекта, при. гтом деформируются (повреждаются) направляющие элементы силового цилиндра (шток, цилиндр и т.д.), что снижает в процессе работы надежность захвата. Кроме того, при передвижении в направлении вдоль щек поднятый объект удерживается щеками только за счет сил трения, что не обеспечивает надежной фиксации (захвата) объекта и не позволяет увеличить скорость перемещения объекта.
Цель изобретения - повышение надежности захвата.
Указанная цель достигается тем, что грузозахватное устройство, содержащее несущий корпус, расположенную, под ним подвижную в вертикальной плоскости раму, шарнирно закрепленные на ней посредством горизонтальных осей приводные рычаги, снабжено двуплечими рычагами, закрепленными средними частями на несущем корпусе посредством горизонтальных осей, расположенных перпендикулярно осям крепления приводных рычагов и выполненных с верхними плечами, изогнутыми навстречу друг другу и расположенными между несущим корпусом и рамой с возможностью контакта с последней.
Кроме того, устройство снабжено пружинами, закрепленными на концах нижних
0 плеч двуплечих рычагов поперечно им с внутренней по отношению к вертикальной оси симметрии корпуса стороны, и губками, закрепленными на свободных концах пружины.
5 На фиг. 1 изображено грузозахватное устройство, вид спереди; на фиг. 2 - то же, вид сбоку.
Грузозахватное устройство состоит из несущего корпуса 1,. привода 2, рамы 3 с
0 шарнирами 4, на которых закреплены приводные рычаги 5, соединенные с приводом 6, на несущем корпусе 1 закреплены горизонтальные оси 7, на которых смонтированы двуплечие рычаги 8 с нижними 9 и верхними
5 10 плечами, изогнутыми навстречу друг дру- ty Нижние плечи снабжены губками 11 и пружинами 12.
Грузозахватное устройство работает следующим образом.
0В исходном положении рама 3 находится в нижнем положении, приводные рычаги 5 vi губки 11 разведены, двуплечие рычаги 8 лежат на упорах 13 своими плечами 10. При включении привода 2 на подъем
5 рама 3-е рычагами 5 поднимается в верхнее положение, при этом при подходе рамы 3 на расстояние h от верхнего положения она касается верхних плеч 10 двуплечих рычагов 8 и начинает на них воздействовать. Рычаги
0 8 при дальнейшем подъеме рамы сводят свои нижние плечи 9 с губками 11, снимаясь с упоров 13.
Грузозахватное устройство устанавливается над подготовленным к транспорти5 ровке грузом 14. Включается привод 2 на опускание. Рама 3 с разведенными захватами 15 опускается на груз 14, при этом при опускании рамы 3 на высоту h под собственным весом опускаются верхние плечи 10
0 рычагов 8, разводя при этом губки 11, и плечи 10 ложатся на упоры 13. Включается привод 6. Приводные рычаги 5 заводят захваты 15 под выступы 16 груза 14. Привод 2 включается на подъем. Захваты 15поднима5 ют груз 14, при этом при подходе рамы 3 к корпусу 1 на расстояние h рама 3 захватывает плечи 10 рычагов 8 и, поворачивая их на шарнирах (осях), сводит губки 11. Губки 11 плотно прижимаются к грузу, сдавливая пружины 12. Механизм передвижения, например консольно-поворотный, переносит объект к месту разгрузки,
Грузозахватное устройство освобождает объект в порядке, обратном описанному. Объект транспортером выводится из-под грузозахватного устройства.
Затем цикл повторяется. Формула изобретения 1. Грузозахватное устройство, содержащее несущий корпус, расположенную под ним подвижную в вертикальной плоскости раму, шарнирно закрепленные на ней посредством горизонтальных осей приводные рычаги, отличающееся тем, что, с целью повышения надежности захвата, оно
0
5
снабжено двуплечими рычагами, закрепленными средними частями на несущем корпусе посредством гопизонтальных осей, расположенных перпендикулярно осям крепления приводных рычагов и выполненных с верхними плечами, изогнутыми навстречу друг другу и расположенными между несущим корпусом и рамой с возможностью контакта с последней.
2. Устройство по п. 1,отличающее- с я тем, что оно снабжено пружинами, за- крепленныр и на концах нижних плеч двуплечих рычагов поперечно им с внутренней по отношению к вертикальной оси симметрии корпуса стороны, и губками, закрепленными на свободных концах пружины.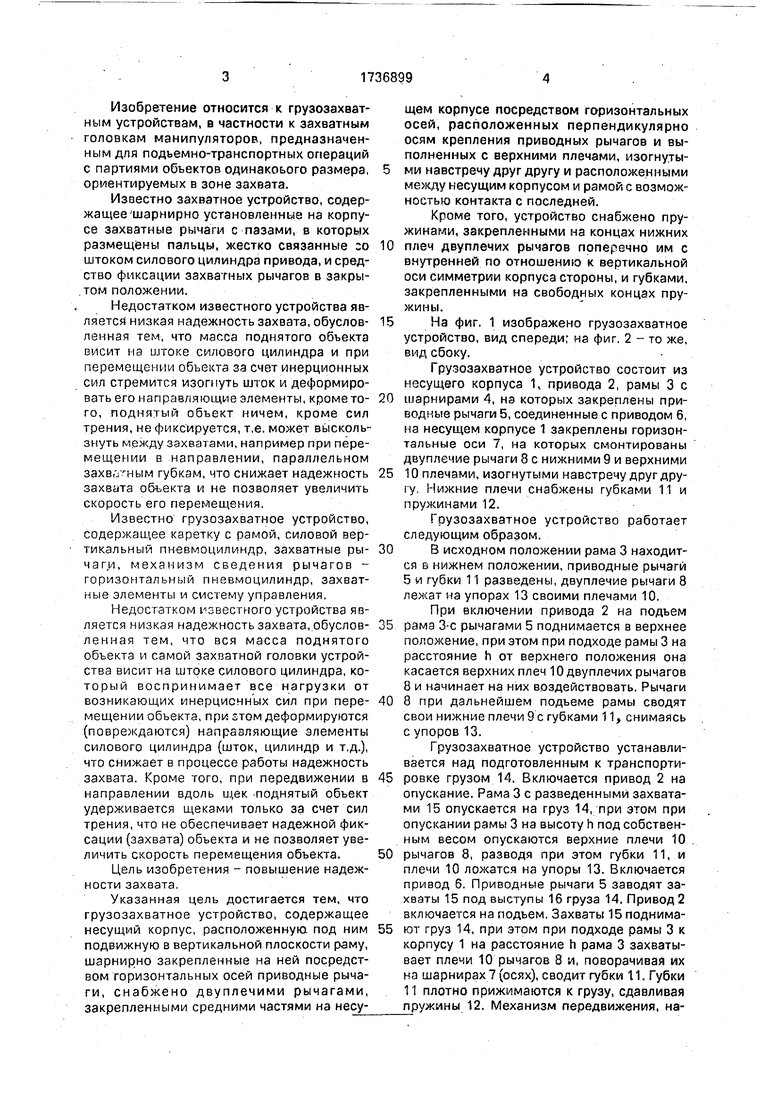

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Грузозахватное устройство | 1987 |
|
SU1491799A1 |
| Захватное устройство для длинномерных грузов | 1987 |
|
SU1519994A1 |
| Грузозахватное устройство | 1990 |
|
SU1740297A1 |
| Грузозахватное устройство | 1985 |
|
SU1344719A1 |
| Грузозахватное устройство | 1986 |
|
SU1446085A1 |
| Грузозахватное устройство | 1990 |
|
SU1710484A1 |
| Грузозахватное устройство | 1991 |
|
SU1798288A1 |
| Грузозахватное устройство | 1991 |
|
SU1787922A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
Изобретение относится к подъемно- транспортному оборудованию. Цель изобретения - повышение надежности захвата. Грузозахватное устройство содержит несущий корпус 1, подвижную в вертикальной плоскости раму 3, шарнирно закрепленные на ней приводные рычаги 5, двуплечие рычаги 8, оси крепления которых к корпусу 1 расположены перпендикулярно осям крепления рычагов 5. Верхние плечи рычагов 8 расположены между корпусом 1 и рамой 3. 1 з.п. ф-лы, 2 ил.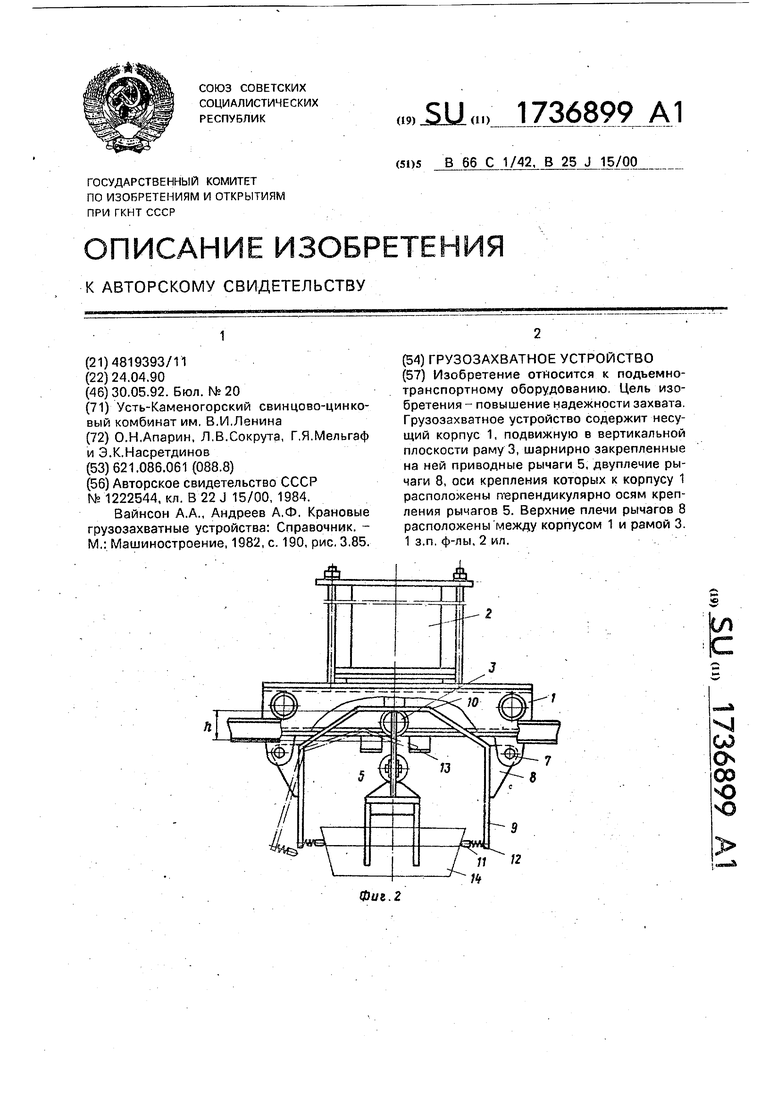
10 3
| Захватное устройство | 1984 |
|
SU1222544A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Вайнсон А.А., Андреев А.Ф | |||
| Крановые грузозахватные устройства: Справочник | |||
| - М.: Машиностроение, 1982, с | |||
| Ускоритель для воздушных тормозов при экстренном торможении | 1921 |
|
SU190A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
