Изобретение относится к подъемно- транспортному оборудованию, в частности к захватным устройствам.
Известен автоматический клещевой захват, содержащий зажимные рычаги с пазами, шарнирно закрепленные на оси, подпружиненную собачку, имеющую загнутый и плоский рычаги. С пазами зажимных рычагов взаимодействует посредством пальцев, перемещающихся в них, подвеска, крепящаяся на крюке крана.
Недостаткам данного захвата является то, что его клещевины раздвигаются при их контакте с изделием в момент опускания захвата. Но не каждое изделие может позволить перемещаться по своей поверхности клещевинам (например, заформованные опоки). К тому же определить достаточность раскрытия клещевин можно лишь визуально, следовательно, применять захват можно только в случаях хорошего доступа к изделию, что значительно сужает возможность его использования.
Наиболее близким техническим решением к заявляемому изобретению является захватное устройство для труб, состоящее
из рамы с направляющими балками, закрепленных на концах рамы двух групп крюков, которые выполнены с возможностью горизонтального перемещения в направляющих балках. Каждая группа крюков имеет общий для всей группы привод, включающий поперечные балки, тележки стягами, последовательно огибающие группу блоков, закрепленных на балках и тележках. Каждый крюк снабжен стягивающей пружиной, используемой для возврата его в исходное положение. Тяговый трос крепится одним своим концом к балке, а другим на раме, огибая группу блоков и взаимодействуя с натяжным устройством и пружинным компенсатором. Для фиксации траверсы в нерабочем положении относительно рамы применяется механизм фиксации, имеющий поворотный замок и гнездо. Для навески на крюк грузоподъемного устройства используются канаты, крепящиеся на траверсе.
Данное устройство обладает сложной конструкцией, значительным числом взаимодействующих друг с другом узлов и деталей, а потому ненадежно в эксплуатации.
СО
с
VJ vj
(Х 00 4
-ч
Цель изобретения - повышение надежности работы.
Указанная цель достигается тем, что грузозахватное устройство, содержащее раму, продольные балки, выполненные с продольными направляющими, расположенные в них каретки с захватными крюками, горизонтально расположенные над каретками пружины, одним своим концом закрепленные на раме, механизм управления каретками, включающий подвижный в вертикальной плоскости и расположенный горизонтально орган, имеющий смонтированный на нем блок, огибаемый тросом, жестко связанным с одной из кареток, а одним из своих концов со свободным концом одной из пружин, и грузовую подвеску, смонтированную на подвижном органе, снабжено жестко смонтированными в центральной части продольных балок рамы вертикальными стойками, снабженными фигурными прорезями, каждая из которых включает изогнутые в вертикальной плоскости разновеликие и сообщающиеся в своей нижней части, а также дополнительно сообщающиеся в их средней части участки, а подвижный в вертикальной плоскости орган представляет расположенную своими концами в фигурных прорезях ось с упомянутым блоком в ее средней части, а трос своим вторым концом связан со свободным концом второй пружины и жестко с второй кареткой, при этом механизм управления каретками снабжен шарнирно смонтированными на соответствующей вертикальной стойке в средней части фигурных прорезей заслонками с возможностью ее ограниченного поворота в вертикальной плоскости длл взаимодействия с концами горизонтальной оси.
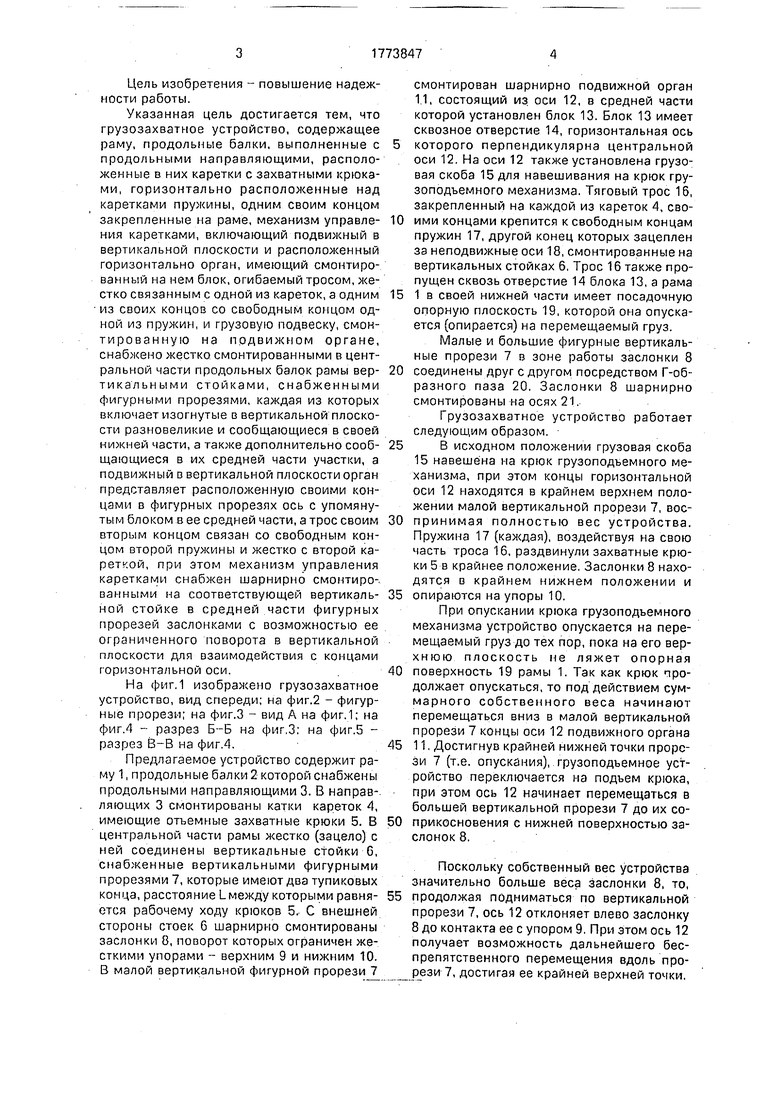
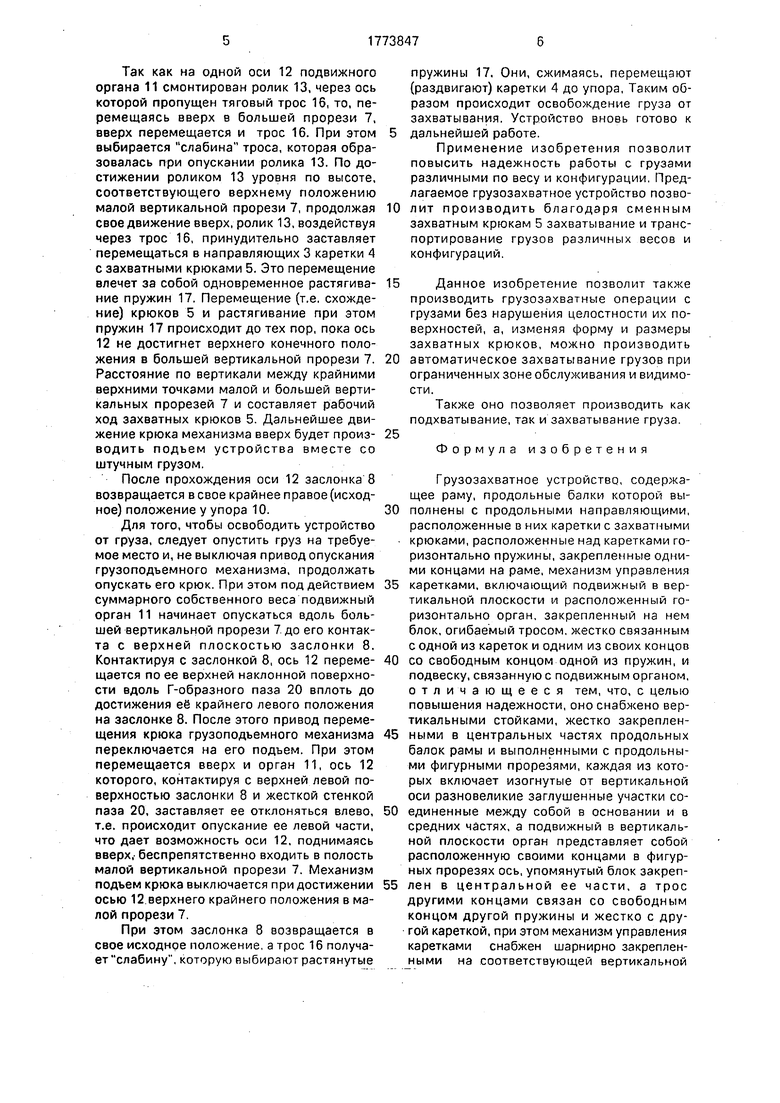
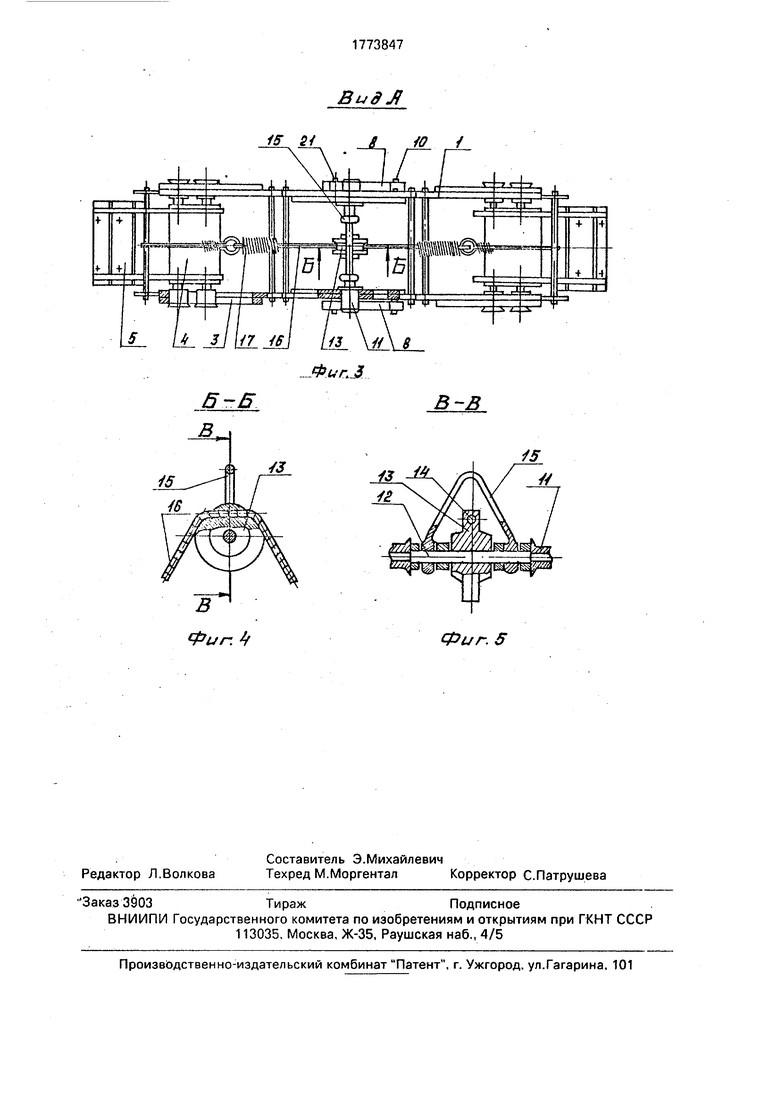
На фиг.1 изображено грузозахватное устройство, вид спереди; на фиг.2 - фигурные прорези; на фиг.З - вид А на фиг.1; на фиг.4 - разрез Б-Б на фиг.З; на фиг.5 - разрез В-В на фиг.4.
Предлагаемое устройство содержит раму 1, продольные балки 2 которой снабжены продольными направляющими 3. В направляющих 3 смонтированы катки кареток 4, имеющие отъемные захватные крюки 5. В центральной части рамы жестко (зацело) с ней соединены вертикальные стойки G, снабженные вертикальными фигурными прорезями 7, которые имеют два тупиковых конца, расстояние Lмежду которыми равняется рабочему ходу крюков 5. С внешней стороны стоек 6 шарнирно смонтированы заслонки 8, поворот которых ограничен жесткими упорами - верхним 9 и нижним 10. В малой вертикальной фигурной прорези 7
смонтирован шарнирно подвижной орган 11, состоящий из оси 12, в средней части которой установлен блок 13. Блок 13 имеет сквозное отверстие 14, горизонтальная ось
которого перпендикулярна центральной оси 12. На оси 12 также установлена грузовая скоба 15 для навешивания на крюк грузоподъемного механизма. Тяговый трос 16, закрепленный на каждой из кареток 4, своими концами крепится к свободным концам пружин 17, другой конец которых зацеплен за неподвижные оси 18, смонтированные на вертикальных стойках 6, Трос 16 также пропущен сквозь отверстие 14 блока 13, а рама
1 в своей нижней части имеет посадочную опорную плоскость 19, которой она опускается (опирается) на перемещаемый груз.
Малые и большие фигурные вертикальные прорези 7 в зоне работы заслонки 8
соединены друг с другом посредством Г-об- разного паза 20. Заслонки 8 шарнирно смонтированы на осях 21.
Грузозахватное устройство работает следующим образом.
В исходном положении грузовая скоба
15 навешена на крюк грузоподъемного механизма, при этом концы горизонтальной оси 12 находятся в крайнем верхнем положении малой вертикальной прорези 7, воспринимая полностью вес устройства. Пружина 17 (каждая), воздействуя на свою часть троса 16, раздвинули захватные крюки 5 в крайнее положение. Заслонки 8 находятся в крайнем нижнем положении и
опираются на упоры 10.
При опускании крюка грузоподъемного механизма устройство опускается на перемещаемый груз до тех пор, пока на его вер- хнюю плоскость не ляжет опорная
поверхность 19 рамы 1. Так как крюк продолжает опускаться, то под действием суммарного собственного веса начинают перемещаться вниз в малой вертикальной прорези 7 концы оси 12 подвижного органа
11. Достигнув крайней нижней точки прорези 7 (т.е. опускания), грузоподъемное устройство переключается на подъем крюка, при этом ось 12 начинает перемещаться в большей вертикальной прорези 7 до их соприкосновения с нижней поверхностью заслонок 8.
Поскольку собственный вес устройства значительно больше веса заслонки 8, то, продолжая подниматься по вертикальной прорези 7, ось 12 отклоняет влево заслонку 8 до контакта ее с упором 9. При этом ось 12 получает возможность дальнейшего беспрепятственного перемещения вдоль про- 7, достигая ее крайней верхней точки.
Так как на одной оси 12 подвижного органа 11 смонтирован ролик 13, через ось которой пропущен тяговый трос 16, то, перемещаясь вверх в большей прорези 7, вверх перемещается и трос 16. При этом выбирается слабина троса, которая образовалась при опускании ролика 13. По достижении роликом 13 уровня по высоте, соответствующего верхнему положению малой вертикальной прорези 7, продолжая свое движение вверх, ролик 13, воздействуя через трос 16, принудительно заставляет перемещаться в направляющих 3 каретки 4 с захватными крюками 5. Это перемещение влечет за собой одновременное растягивание пружин 17. Перемещение (т.е. схождение) крюков 5 и растягивание при этом пружин 17 происходит до тех пор, пока ось 12 не достигнет верхнего конечного положения в большей вертикальной прорези 7. Расстояние по вертикали между крайними верхними точками малой и большей вертикальных прорезей 7 и составляет рабочий ход захватных крюков 5. Дальнейшее движение крюка механизма вверх будет производить подъем устройства вместе со штучным грузом.
После прохождения оси 12 заслонка 8 возвращается в свое крайнее правое (исходное) положение у упора 10.
Для того, чтобы освободить устройство от груза, следует опустить груз на требуемое место и, не выключая привод опускания грузоподъемного механизма, продолжать опускать его крюк. При этом под действием суммарного собственного веса подвижный орган 11 начинает опускаться вдоль большей вертикальной прорези 7 до его контакта с верхней плоскостью заслонки 8. Контактируя с заслонкой 8, ось 12 перемещается по ее верхней наклонной поверхности вдоль Г-образного паза 20 вплоть до достижения её крайнего левого положения на заслонке 8. После этого привод перемещения крюка грузоподъемного механизма переключается на его подъем. При этом перемещается вверх и орган 11, ось 12 которого, контактируя с верхней левой поверхностью заслонки 8 и жесткой стенкой паза 20, заставляет ее отклоняться влево, т.е. происходит опускание ее левой части, что дает возможность оси 12, поднимаясь вверх,-беспрепятственно входить в полость малой вертикальной прорези 7. Механизм подъем крюка выключается при достижении осью 12 верхнего крайнего положения в малой прорези 7.
При этом заслонка 8 возвращается в свое исходное положение, а трос 16 получает слабину, которую выбирают растянутые
пружины 17. Они, сжимаясь, перемещают (раздвигают) каретки 4 до упора, Таким образом происходит освобождение груза от захватывания. Устройство вновь готово к
дальнейшей работе.
Применение изобретения позволит повысить надежность работы с грузами различными по весу и конфигурации. Предлагаемое грузозахватное устройство позволит производить благодаря сменным захватным крюкам 5 захватывание и транспортирование грузов различных весов и конфигураций.
Данное изобретение позволит также
производить грузозахватные операции с грузами без нарушения целостности их поверхностей, а, изменяя форму и размеры захватных крюков, можно производить
автоматическое захватывание грузов при ограниченных зоне обслуживания и видимости.
Также оно позволяет производить как подхватывание, так и захватывание груза.
Формула изобретения
Грузозахватное устройство, содержащее раму, продольные балки которой выполнены с продольными направляющими, расположенные в них каретки с захватными крюками, расположенные над каретками горизонтально пружины, закрепленные одними концами на раме, механизм управления
каретками, включающий подвижный в вертикальной плоскости и расположенный горизонтально орган, закрепленный на нем блок, огибаемый тросом, жестко связанным с одной из кареток и одним из своих концов
со свободным концом одной из пружин, и подвеску, связанную с подвижным органом, отличающееся тем, что, с целью повышения надежности, оно снабжено вертикальными стойками, жестко закрепленными в центральных частях продольных балок рамы и выполненными с продольными фигурными прорезями, каждая из которых включает изогнутые от вертикальной оси разновеликие заглушенные участки соединенные между собой в основании и в средних частях, а подвижный в вертикальной плоскости орган представляет собой расположенную своими концами в фигурных прорезях ось, упомянутый блок закреплен в центральной ее части, а трос другими концами связан со свободным концом другой пружины и жестко с другой кареткой, при этом механизм управления каретками снабжен шарнирно закрепленными на соответствующей вертикальной
стойке между участками фигурных прорезей поворота для взаимодействия с концами го- заслонками с возможностью ограниченного ризонтальной оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ВИЛОЧНОГО ПОГРУЗЧИКА | 1991 |
|
RU2011636C1 |
| БОКОВОЕ ЗАЖИМНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ | 1991 |
|
RU2011635C1 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| Грузозахватное устройство для подъема штучных грузов коробчатого сечения | 1974 |
|
SU550330A1 |
| Захватное устройство для труб | 1982 |
|
SU1065326A1 |
| Захватное устройство для грузов | 1979 |
|
SU874572A1 |
Использование: захват, транспортировка грузов. Сущность изобретения: грузозахватное устройство, содержащее раму, расположенные на ней каретки с захватными крюками, механизм управления каретками, включающий вертикальные стойки с фигурными прорезями, расположенную в них ось с блоком, огибаемым тросом, свободные концы которого связаны с каретками. 5 ил.
Фиг. 2
Фиг /
о
BudJ
ff Sf
-ФикЗ
б-Б
/ff /
В-В
Фиг. 5
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
