А-А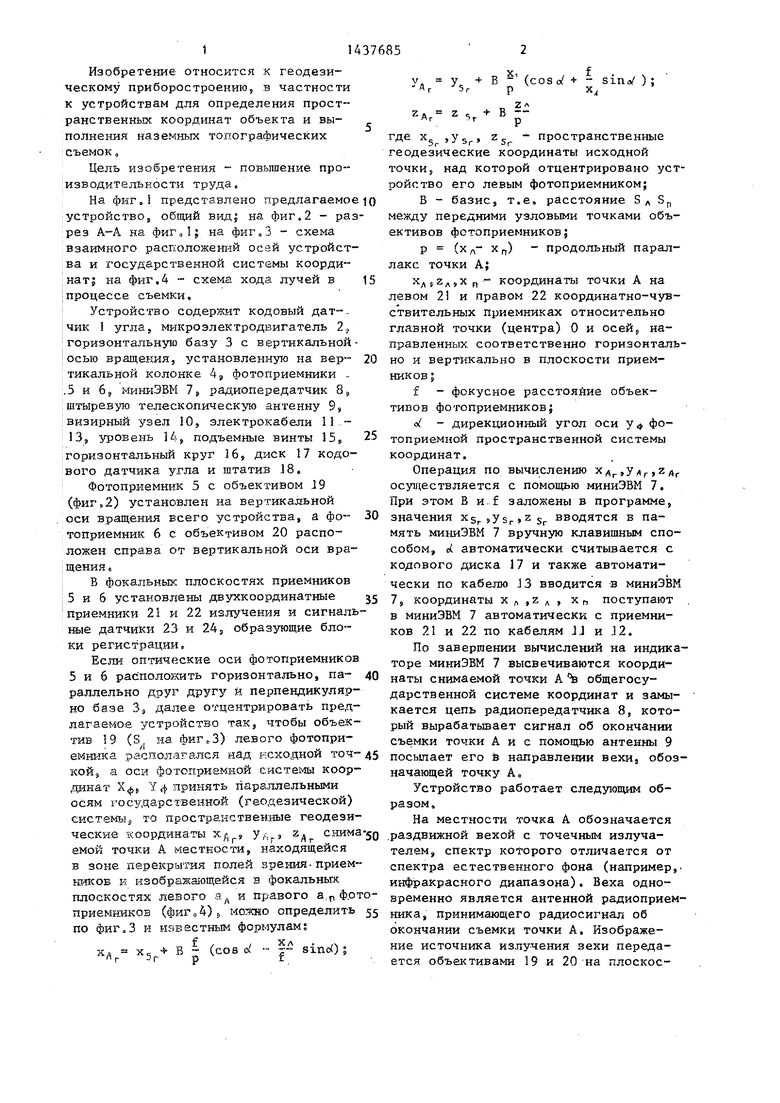
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| ОПРЕДЕЛИТЕЛЬ ПОЛЯРНЫХ КООРДИНАТ ОГНЕВЫХ СРЕДСТВ, ОБНАРУЖИВАЮЩИХ СЕБЯ БЛЕСКОМ ВЫСТРЕЛА | 2003 |
|
RU2252442C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ (ВАРИАНТЫ) | 2006 |
|
RU2334934C2 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| ЭЛЕКТРОННЫЙ НИВЕЛИР | 2024 |
|
RU2834921C1 |
| ПРИБОР НАБЛЮДЕНИЯ-ПРИЦЕЛ СО ВСТРОЕННЫМ ПАССИВНЫМ ДАЛЬНОМЕРОМ | 2021 |
|
RU2785957C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2529732C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
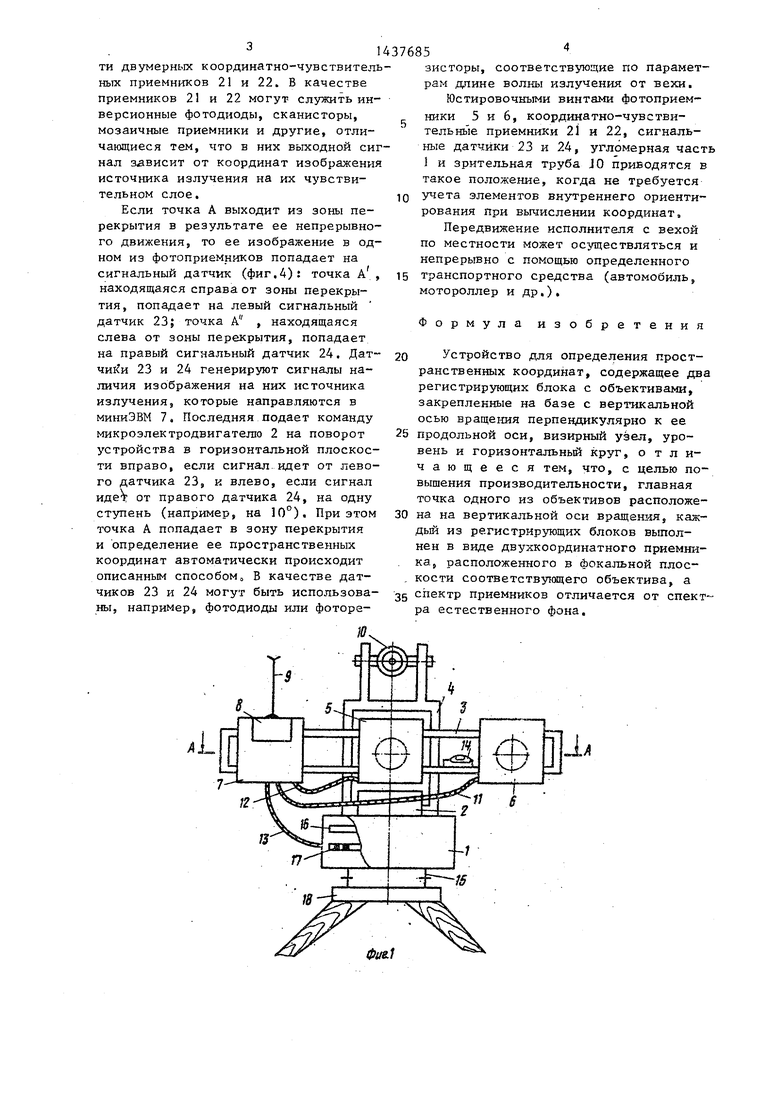
Изобретение относится к фотограмметрии и предназначено для автоматического определения координат объектов. Целью изобретения является повышение производительности труда. На базе 3 с вертикальной осью вращения расположены два регистрирующих блока, образованных двухкоординатньпчи приемниками излучения 21, 22 и сигнальными датчиками 23, 24, позволяющими корректировать положения базы 3 при уходе перемещающегося источника излучения со спектром, отличающимся от спектра естественного фона, из зоны перекрытия регистрирующих блоков. Визирный узел, уровень 14 и горизонтальный круг предназначены для пространственного ориентирования устройства . Для упрощения алгоритма обработки измерений главная точка одного из объективов совмещена с вертикальной осью вращения устройства. Каждый из двухкоординатных приемников расположен в фокальной плоскости соответствующего объектива, а рабочий спектр приемников соответствует спектру источника излучения. 4 ил. «5 Г 4t.rj&i
ОЗ
G5
00
20
22 2
фиг. 2
11
Изобретение относится к геодезическому приборостроению5 в частности к устройствам для определения прост- ранственньпс координат объекта и вы- полне1-шя наземных топографических съемок,
Цель изобретения - повышение производительности труда.
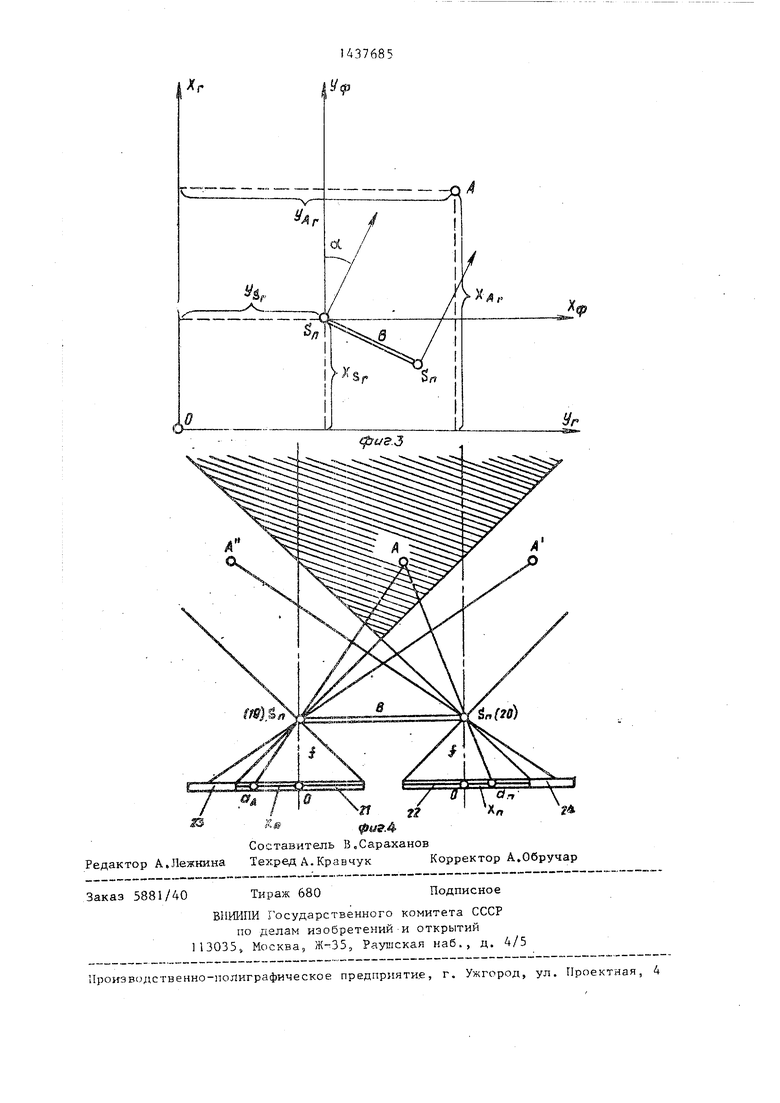
На фиг. представлено предлагаемо устройство, общий вид| на фиг,2 - рарез А-А на фиГв1; на фиг,3 - схема взаимного расположений осзй устройства и государственной системы коорди- нат| на фиг.4 - схема хода лучей в ;процессе съемки.
Устройство содержит кодовый дат™;чик угла, микроэлектродвигатель 2.,
;горизонтальную базу 3 с вертикальной
осью вращения, установленную на вер
тикальной колонке 4, фотоприемники - .5 и 6, МиниЭВМ 75 радиопередатчик 8,
штыревую телескопическую антенну 9s, : визирный узел 10, электрокабели 11,.13j уровень 14, подъемные винты 15
;горизонтальный крут 16, диск 17 кодового датчика утла и штатив J8,
Фотоприемник 5 с объективом 19 (фиг.,2) установлен на вертикальной оси вращения всего устройства, а фо- топриемник 6 с объективом 20 расположен справа от вертикальной оси вра- :щения«
: В фокальнызс плоскостях приемников :5 и б установлены двухкоординатные Приемники 21 и 22 излучения и сигналь iftie датчики 23 и 24, образующие блоки регистрации,
Если оптические оси фотоприемников 5 и 6 распологшть горизонтально, па- раллельно друг другу и перпендикулярно базе 3s далее отцентрировать предлагаемое устройство так, чтобы объе:к- тив 19 (S, на ) левого фотоприемника располагался над исходной точ- кой, а оси фотоприемной систе Ф коор- ,гщнат Хф, Y4 принять параллельными осям государственной (геодезической) системыэ то простракствеиные геодезические координаты , Ул д емой точки А местности, находящейся в зоне перекрытия полей зрения-приемников и изображающейся в фокальнык плоскостях левого Нд и правого а,р ф.от приемников (фигД) можно определить по фиг.З и извастнык формулам;
,,
В
- (cos л
р
1 sincOl
5
0
5
0
где
АГАГ
X
+ В
5г
5г
- Пространственные
геодезические координаты исходной ТОЧКИ; над которой отцентрировано устройство его левым фотоприемником;
В - базис, т.е, расстояние Зд S между передними узловыми точками объективов фотоприемников;
р (х д- X г,) продольный параллакс точки А;
, z,Xf,- координаты точки А на
левом 2 и правом 22 координатно-чув- ствительных приемниках относительно главной точки (центра) О и осей направленных соответственно горизонтально и вертикально в плоскости приемников;
f - фокусное расстояйие объективов фотоприемников;
0 - дирекционный угол оси у фотоприемной пространственной системы координат.
Операция по вычислению Хд,у/|,гд осуи1ествляется с помощью миниЭВМ 7. При этом В и f заложены в программе, значения xs sysrs Sr вводятся в память миниЭВМ 7 вручную клавишным способом, (з( автоматически считывается с кодового диска 7 и также автоматически по кабелю J3 вводится в миниЭВМ
35 79 координаты х
, X г, поступают
в миниЭВМ 7 автоматически с приемников 21 и 22 по кабелям jj и J2.
По завершении вычислений на индикаторе миниЭВМ 7 высвечиваются координаты снимаемой точки А Ъ общегосударственной системе координат и замыкается цепь радиопередатчика 8, который вырабатьшает сигнал об окончании съемки точки А и с помощью антенны 9 посыпает его 6 направлении вехи, обозначающей точку А
Устройство работает следующим образом.
На местности точка А обозначается .раздвижной вехой с точечным излучателем, спектр которого отличается от спектра естественного фона (нашример,. инфракрасного диапазона). Веха одновременно является антенной радиоприемника. Принимающего радиосигнал об окончании съемки точки А. Изображение источника излучения зезси передается объективами 19 и 20 на плоскоеФие.1
Q / л .. п х. А
«г4
Составитель В.Сараханов Редактор АЛежнина Техред А.Кравчук Корректор А.Обручар
Заказ 5881/40 Тираж 680Подписное
ВИИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, ,, Раушская наб., д. 4/5
| Лобанов А.П | |||
| Фотограмметрия | |||
| М.; Недра, 1984, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Там же, с | |||
| Ударно-долбежная врубовая машина | 1921 |
|
SU115A1 |
