11А39223
Изс5ретение относится к бурению нефтяных и газовых скважин, а именно к устройствам.для определения коор- динат забоя.
Целью изобретения является повышение точности определения координат забоя и осуществление оперативного контроля искривления скважины отно- сительно ее проекта.IQ
На фиг,1 приведена структурная схема устройства; на фиг, 2 - структурная схема блока сглаживания,
Устройс,тво для контроля положения
забоя содержит датчик 1 азимутально- 45 вателя 4 наклонной глубины, а выход 35
го угля, датчик 2 зенитного угла,датчик 3 наклонной глубины, аналого-цифровые преобразователи 4, блок 5 запоминания измеренных углов, блок б пересчета координат, блок 7 аппрокси- 20 мации, блок 8 запоминания коор динат, анализатор 9 координат, блок 10 ре- тистрации координат, блок 11 сравнения, блок 12 вычисления шага дискретизации, блок 13 экстраполяции коор- 25 динат, блок 14 сглаживания, блок 15 экстраполяции углов, блок 16 запоми- :нания проектных углов и блок 17 регистрации.
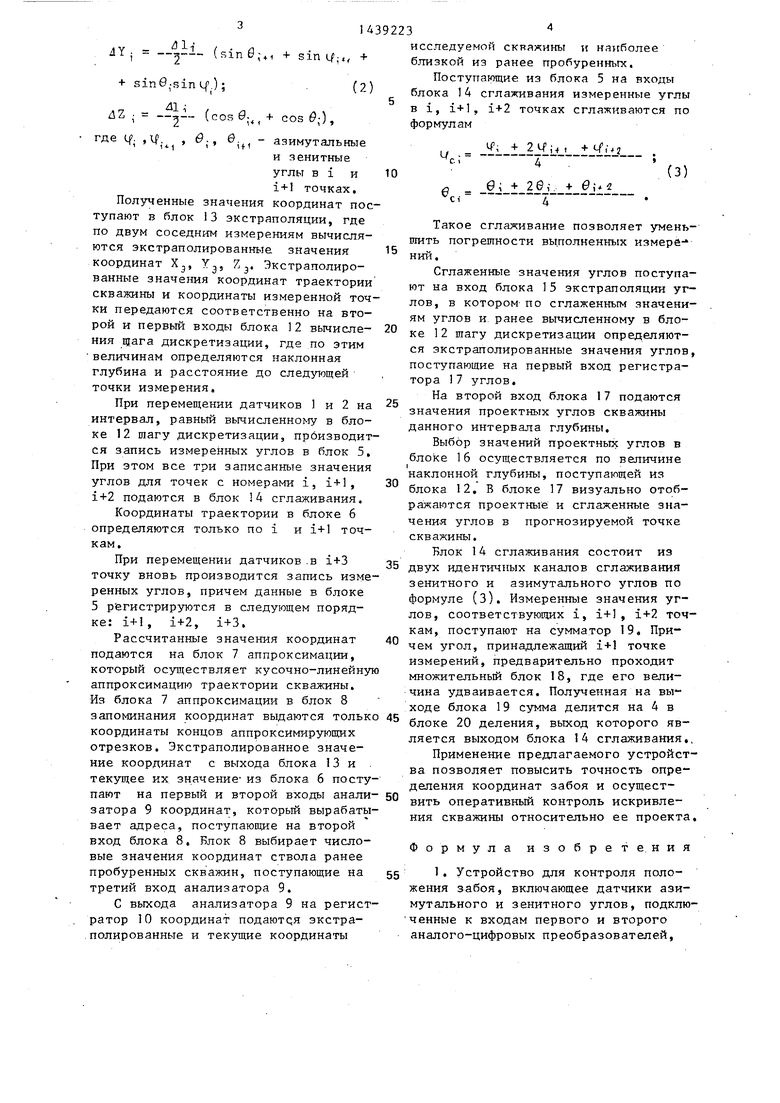
Елок 14 сглаживания состоит из мно-0 жйтельных блоков 18, сумматоров 19 и блоков 20 деления.
Первый и второй входы блока 5 запоминания измеренных углов подключены к цифроаналоговым преобразователям 4 датчиков 1 и 2 азимутального и зенитного углоВа .третий вход соединен с выходом блока 11 сравнения первый и второй выходы блока 5 запоминания измеренных углов соединены с первым и вторым входами блоков 6 и 14 пересчета координат и сглаживания, а его третий выход - с третьим входом блока 14 сглаживания в При этом выходы блока 14 сглаживания ключены к,первому и второму входам блока 15 экстраполяции углов, третий вход которого соединен с выходом блока 12 вычисления шага дискретизации, а выход блока 15 экстраполяции углов подключен к первому входу блока 17 регистрации углов, второй вход которого связан с выходом блока 16 запоминания углов, подключенного входом к выходу блока.12 вычисления шага дискретизации. Причем первый вход блока 8 подключен к выходу блока 7 аппроксимации, первый вход которого подключен к выходу блока 12 вычисления
40
50
S5
к управляющему входу блока пересчета координат о
Устройство работает следутощим образом.
Вначале, когда датчики 1 - 3 находятся в устье скважины, производится сброс в. нуль регистров и сут мато- ров блоков устройства. В блоке 12 вычисления шага дискретизации устанавливаются наклонная глубина и расстояние до первого измерения и производится запись в блок 5 значений азимутального и зенитного углов,Второй и последующие моменты записи сигналов с датчиков 1 и 2, преобразованных в цифровую форму в аналого- цифровых преобразователях 4, соответствуют равенству заданной глубины глубине, отсчитанной датчиком 3 наклонной глубины. Только при этом условии блок 11 вьщает разрешение на запись информации блоком 5 и пересчета координат блоком 6
Вычисление координа т в блоке 6 производится по результатам измерения угловS выполненным в начале и конце интервала 1; , по формулам
X.. Х., Y,-. Y..,
Z; Z-;., где X., Y., Z.
+ ./5X.I + /1Y,;
+ az,-.
(1)
:дХ jjuY;, uZ декартовые координаты i-й точки траектории скважины, Д1 - шаг дискретизации по глубине по i-му измерению; приращения координат, рассчитываемые по формулам
/)Х;
Л1;
(sin 9 ; + , COS U ; + i +
+ sinG-cos g.) ;
шага дискретизации, а второй вход блока 7 аппроксимации подключен к выходу блоха 6 пересчета координат и к первь м выходам блока 13 экстраполяции и блока 12 вычисления шага дискретизации. При этом выход блока 13 экстраполяции подключен к первому входу анализатора 9 координат и второму входу блока 12 вычисления шага дискретизации, выход которого соединен с пер- вым входом блока 11 сравнения, второй вход которого подключен к выходу третьего аналого-цифрового преобразо5
0 5
0
g 0
к управляющему входу блока пересчета координат о
Устройство работает следутощим образом.
Вначале, когда датчики 1 - 3 находятся в устье скважины, производится сброс в. нуль регистров и сут мато- ров блоков устройства. В блоке 12 вычисления шага дискретизации устанавливаются наклонная глубина и расстояние до первого измерения и производится запись в блок 5 значений азимутального и зенитного углов,Второй и последующие моменты записи сигналов с датчиков 1 и 2, преобразованных в цифровую форму в аналого- цифровых преобразователях 4, соответствуют равенству заданной глубины глубине, отсчитанной датчиком 3 наклонной глубины. Только при этом условии блок 11 вьщает разрешение на запись информации блоком 5 и пересчета координат блоком 6
Вычисление координа т в блоке 6 производится по результатам измерения угловS выполненным в начале и конце интервала 1; , по формулам
g 0
5
X.. Х., Y,-. Y..,
Z; Z-;., где X., Y., Z.
+ ./5X.I + /1Y,;
+ az,-.
(1)
:дХ jjuY;, uZ декартовые координаты i-й точки траектории скважины, Д1 - шаг дискретизации по глубине по i-му измерению; приращения координат, рассчитываемые по формулам
/)Х;
Л1;
(sin 9 ; + , COS U ; + i +
+ sinG-cos g.) ;
ilY
li , . - ( sin
; + i
+ sin0,-sin I/.); 4Z (cos0;,,+
исследуемой скважины н наиболее близкой из ранее пробуренных.
Поступающие из блока 5 на входы блока 14 сглаживания измеренные углы в i, i+l, i+2 точках сглаживаются по формулам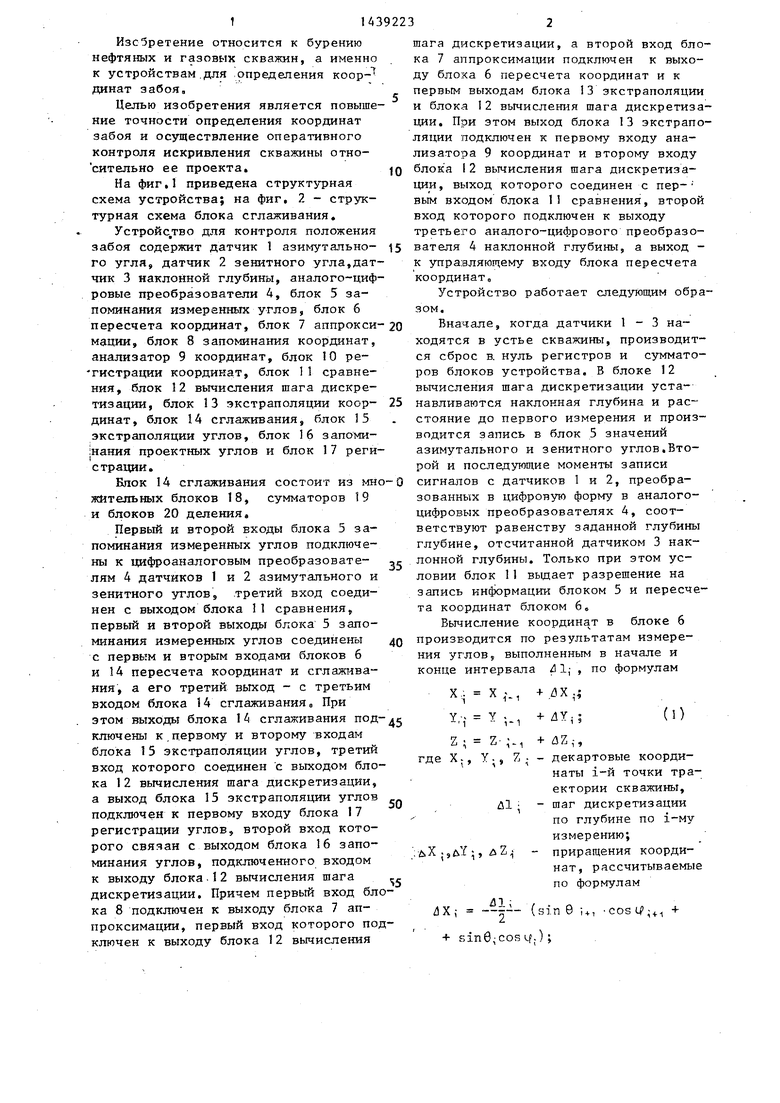
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля положения забоя | 1976 |
|
SU746094A2 |
| Устройство для контроля положения забоя | 1991 |
|
SU1816856A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2089854C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2092791C1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
| Устройство для определения координат траектории скважины | 1976 |
|
SU602672A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
Изобретение относится к бурению скважин и позволяет определить координаты (к) забоя. Цель - осуществление оперативного контроля искривления скважины относительно ее проекта, Устр-во содержит датчики азимутально- : го 1 и зенитного 2 углов (У) и датчик 3. наклонной глубины, аналого-цифровые преобразователи 4, блок (в) 5 запоминания измеренных У, Б 6 пересче-; та координат (К), Б 7 аппроксимации, Б 8 запоминания К. Устр-во имеет анализатор К, Б 10 регистрации К, Б 11 сравнения, Б 2 вычисления шага дискретизации, В 13 экстраполяции К, Б 14 сглаживания, В 15 экстраполяции У, Б 16 запоминания проектных У, Б 17 регистрации. В 14 состоит из множительных В, сумматоров и Б деления. Вычисление К производится в Б 6 по результатам измерения У на концах интервала дискретизации по глубине. Экстраполированные значения К определяются в Б 13 по двум соседним измерениям. По текущим и экстраполированным значениям К вычисляется в Б 12 шаг дискретизации по глубине, который используется для расчета глубины и расстояния до следующей точки измерения. На Б 10 поступают текущие и экстраполированные значения К скважи- ны, а также К наиболее близкой из ранее пробуренных скважин. Текущие значения У сглаживаются в Б 14, а в В 17 регистрируются проектные и сглаженные значения в прогнозируемой точке. Значения К ранее пробуренных скважин и проектных У хранятся соответственно в Б 8 и 16. Устр-во позволяет повысить точность определе- .ния К забоя и эффективность процесса проводки скважин. 1 з.п. ф-льт,2 ил. S (Л 4iik со N9 1ч9 00 ФиН
где и. jXJJ. , в.
l ц.. ,
iHазимутальныеи зенитные углы в i и i+I точках.
Полученные значения координат поступают в блок 13 экстраполяции, где по двум соседним измерениям вычисляются экстраполированные значения
координат X.,, YJ, Zj. Экстраполированные значения координат траектории скважины и координаты измеренной точки передаются соответственно на второй и первый входы блока 12 вьиисле- ния щага дискретизации, где по этим величинам определяются наклонная глубина и расстояние до следующей точки измерения.
При перемещении датчиков 1 и 2 на интервал, равный вычисленному в блоке 12 шагу дискретизации, прбизводит- ся запись измеренных углов в блок 5, При этом все три записанные значения углов для точек с номерами i, i+1, i+2 подаются в блок 4 сглаживания.
Координаты траектории в блоке 6 определяются только по i и 1+1 точкам.
При перемещении датчиков .в i+3 точку вновь производится запись измеренных углов, причем данные в блоке 5 р егистрируются в следующем порядке: i+1, i+2, i+3.
Рассчитанные значения координат подаются на блок 7 аппроксимации, который осуществляет кусочно-линейную аппроксимацию траектории скважины. Из блока 7 аппроксимации в блок 8
Блок 14 сглаживания состоит из двух идентичных каналов сглаживания зенитного и азимутального углов по формуле (З), Измеренные значения углов, соответствующих i, 1+1, 1+2 точкам, поступают на сумматор 19, Причем угол, принадлежащий 1+1 точке измерений, предварительно проходит множительный блок 18, где его величина удваивается. Полученная на выходе блока 19 сумма делится на 4 в
запоминания координат выдаются только 45 Q 30 деления, вьтход которого яв- координаты концов аппроксимирующих ляется выходом блока 14 сглаживания., отрезков. Экстраполированное значение координат с выхода блока 13 и . текущее их значение из блока 6 поступают на первый и второй входы анали- 50 затора 9 координат, который вырабатывает адреса, поступающие на второй вход блока 8, Блок 8 выбирает числовые значения координат ствола ранее пробуренных скважин, поступающие на 55 третий вход анализатора 9,
С выхода анализатора 9 на регистратор 10 координат подаются экстраполированные и текущие координаты
Применение предлагаемого устройства позволяет повысить точность определения координат забоя и осуществить оперативный контроль искривления скважины относительно ее проекта.
Формула изобретения
1, Устройство для контроля положения забоя, включающее датчики азимутального и зенитного углов, подклю- чанные к входам первого и второго аналого-цифровых преобразователей.
10
с;
(3)
с,
Такое сглаживание позволяет уменьшить погрешности выполненных измере-
НИИ,
Сглаженньш значения углов поступают на вход блока 15 экстраполяция углов, в котором- по сглаженным значениям углов и ранее вычисленному в блоке 12 шагу дискретизации определяются экстраполированные значения углов, поступающие на первый вход регистратора 17 углов.
На второй вход блока 17 подаются значения проектных углов скважины данного интервала глубины.
Выбор значений проектных углов в блоке 16 осуществляется по величине наклонной глубины, поступающей из блока 12, В блоке 17 визуально отображаются проектные и сглаженные значения углов в прогнозируемой точке скважины.
Блок 14 сглаживания состоит из двух идентичных каналов сглаживания зенитного и азимутального углов по формуле (З), Измеренные значения углов, соответствующих i, 1+1, 1+2 точкам, поступают на сумматор 19, Причем угол, принадлежащий 1+1 точке измерений, предварительно проходит множительный блок 18, где его величина удваивается. Полученная на выходе блока 19 сумма делится на 4 в
Q 30 деления, вьтход которого яв- ляется выходом блока 14 сглаживания.,
Q 30 деления, вьтход которого яв- ляется выходом блока 14 сглаживания.,
Применение предлагаемого устройства позволяет повысить точность определения координат забоя и осуществить оперативный контроль искривления скважины относительно ее проекта.
Формула изобретения
1, Устройство для контроля положения забоя, включающее датчики азимутального и зенитного углов, подклю- чанные к входам первого и второго аналого-цифровых преобразователей.
блок пересчета координат, выход которого соединен с первыми входами блоков экстраполяции и вычисления шага дискретизации и с вторыми входами анализатора координат и блока аппроксимации, первый вход которого подключен к выходу блока вычисления шага дискретизации и первому входу блока сравнения, второй вход которого сое- динен через третий аналого-цифровой преобразователь с датчиком наклонной глубины, а выход подключен к управляющему входу блока пересчета координат, выход блока аппроксимации сое- динен с первым входом блока запоминания координат, второй вход которого подключен к первому выходу -анализатора координат, третий вход которого соединен с выходом блока запоминания координат, первый вход подключен к второму входу блока вычисления шага дискретизации и выходу блока экстраполяции, второй вход которого соединен с первым входом блока сравнения, выход анализатора координат подключен к блоку регистрации координат, отличающееся тем, что, с целью повышетгя точности определения координат забоя и осуществления one- ративного контроля искривления скважины относительно ее проекта, оно снабжено блоком запоминания измерен- ных углов, блоком сглаживания,блоком экстраполяции углов, блоком запомина- ния проектных углов и блоком регистрации углов, причем первый и второй входы блока запоминания измеренных
углов подключены к выходам первого и второго цифроаналоговых преобразователей, третий вход соединен с управляющим входом блока пересчета координат, первый и второй входы которого подключены соответственно к первому и второму выходам блока запоминания измеренных углов и первому и второму входам блока сглаживания,третий вход которого соединен с третьим выходом блока запоминания измеренных углов, первый и второй выходы подключены соответ.ственно к первому и второму входам блока экстраполяции углов, третий вход которого соединен с входом блока запоминания проектных углов и с выходом блока вычисления шага дискретизации, выход блока экстраполяции соединен с первым входом блока регистрации углов, второй вход которого подключен к выходу блока запоминания проектных углов,
23
Вс
| Устройство контроля положения забоя | 1976 |
|
SU746094A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
