1
Изобретение относится к бурению нефтяных и газовых скважин, в частности к кустовому бурению.
По основному авт. св. № 604975 известно устройство контроля положения забоя, содержащее датчик азимутального угла, датчик угла наклона, датчик наклонной глубины, подключённые к выходам аналого-цифровых преобразователей,, запоминающий блок, блок регистрации информации, блок пересчета координат и анализатор координат, причем входы блока пересчета коор- ю динат подключены к выходам аналого-цифровых преобразователей, а выходы - к первым, входам анализатора координат и к первым входам запоминающего блока, вторые входы которого соединены с первыми выходами анализатора координат, а выходы- со вторыми входами анализатора координат, выходы которого подключены к блоку регистрации информации.
Однако это устройство не позволяет определить координаты траектории с высокой 20 точностью, так как в нем отсутствуют аппаратные средства для изменения параметров с оптимальным шагом дискретизации по траектории, позволяющие минимизировать
ощибки измерения координат. Кроме того, устройство не имеет средств для прогнозирования возможного пересечения, что важно для качественного управления траекторией скважины. Вместе с тем, в устройстве отсутствуют средства для сжатия информации.
Цель изобретения - повышение точности определения координат забоя и повыщение надежности оперативного предупреждения пересечения стволов скважин за счет прогнозирования положения забоя.
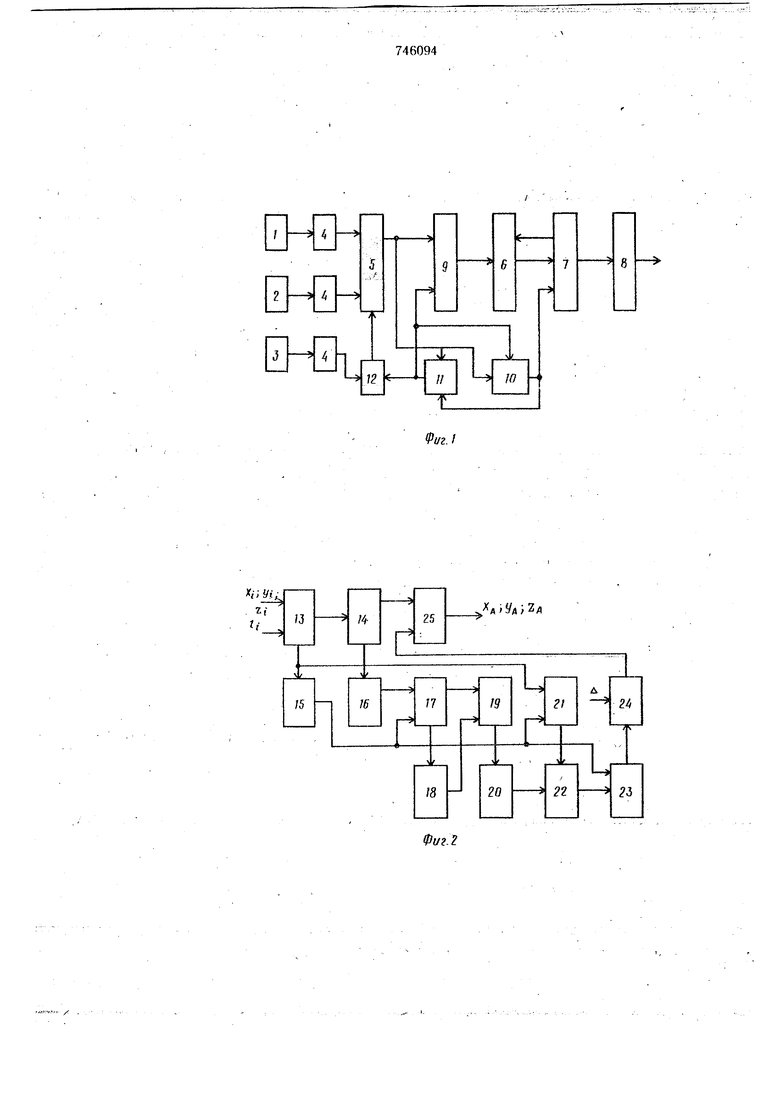
Для достижения указанной цели устройство контроля положения забоя снабжено блоком вычисления щага дискретизации, блоком сравнения, блоком аппроксимации и блоком экстраполяции, причем первые входы запоминающего блока подключены к выходы блока аппроксимации, первые входы которого подключены к выходам блока вычисления щага дискретизации, а вторые входы блока аппроксимации подключены к выходам блока пересчета координат, выход которого подключен к первым входам блока вычисления щага дискретизации и первым входам блока экстраполяции, вторые входы которого подключены к выходам блока вычисления щага дискретизации, при этом выходы блока экстраполяции подключены к первым входам анализатора координат и вторым входам блока вычисления шага дкскретнзацин, выходы которого соединены с первыми входами блока сравнения, вторые входы которого подключены к выходам аналого-цифрового преобразователя наклонной глубины, а выходы - к блоку пере счета координат. На фиг. 1 приведена фунйциШ&лШая схема устройства; на фиг. 2 - функциональная схема блока аппроксимации; на фиг. 3 -. функциональная схема блока экстраполяции; на фиг. 4 - функциональная схема блока вычисления тага дискретизаций. Устройство контроля положения забоя содержит датчик 1 азимутального угла, датчик 2 угла наклона, датчик 3 наклонной глубины, аналого-цифровые преобразова.тели 4, блок 5 пересчета координат, запоминаюцдий блок 6, анализатор 7 координат, блок 8 регистрации информации, блок 9, аппроксимации, блок 10 экстраполяции, блок 1 вычисления шага дискретизации, блок 1 сравнепия. Блок 9 аппроксимации (фиг. 2) содержит блоки 13-16 регистров, блок 17 вычитания, блок-регистр 8, блок деления 19, блок регистров 20, блок вь1читания 21, блок умножения 22, сумматор 23, блок сравнения. 24, блок, выдачи 25. Блок экстраполяции 10 (фиг. 3) состоит из блока регистров 26 блока вычитания 27, блока умножения 28, сумматора 29, блока регистров 30, блока деления 31. Блок 11 (фиг. 4) имеет в своем составе блок вычитания 32, блок деления 33, блок 34 возведения в квадрат, блок умножения 35, сумматор 36, блок 37 извлечения квадратного корня 37, блок умножения 38, накапдаёНЮщий сумматор 39. . Устройство работает следующим образбм. Перед запуском устройства, когда датчики находятся в устье скважины, производится сброс в нуль регистров и сумматоров блоков. В блоке вычисления шага дискретизации 1 при этом устанавливается наклонная глубина и расстояние до первого измерения. - Сигналы с датчиков 1-3 преобразуются с помощью аналого-цифровых преобразователей 4 из аналоговой в цифровую форму и принимаются в блок 5 лишь тогда, когда датчики опускаются до,.наклонной глубины, равной значений, вычисленному в блоке II, так как блок 12 лищь в этом случае выдает разрешение на пересчет координат и величину шагадискретизации на вход блока 5. iB блоке 5 вь числяются значения коор динат rib соотношениям: 4 х1-1.+ . ; Af;sin/icoso i zi. 2f.i-f AE:cos i,
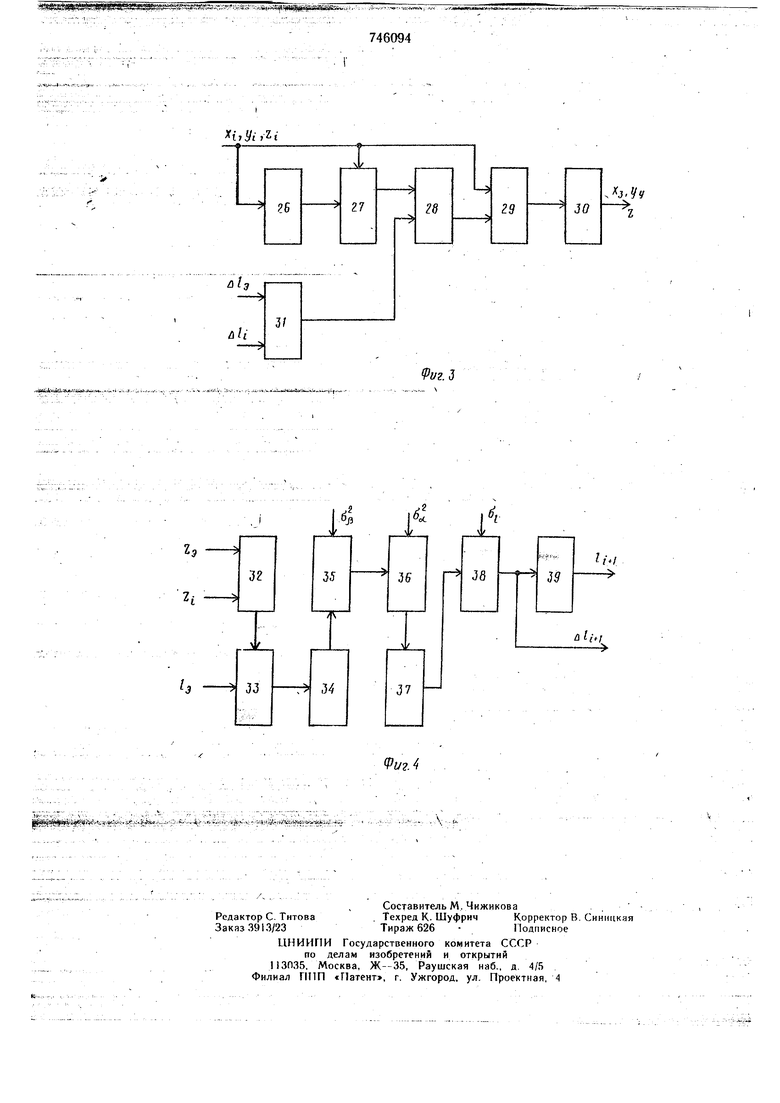
746094 где X;., if i, ж i - декартоиы координаты i точки;Дс - шаг дискретизации при i измерении;Д, -угол наклона и азимут в i точке траектории. Полученные значения координаты поступают в блок 10, где по данному измерению и по предыдущем вычисляются экстраполированные значения л,, Uj, 2.3, причем на первые входы блока 10 поступают значения координат, а на вторые - шага дискретизации из блока II. Работа блока 10 может быть основана на принцйп е линейной экстраполяции по двум последним точкам измерений. При этом экстраполированное значение координаты может быть вычислено для каждой координаты как: U3 UL+(.Uu )|;-, где УЗ --экстраполированная координата; Ц -- значение координаты в последней точке измерений; Ui.-t -значение координаты в предыдущей точке измерения; дЕ|-заданный интервал экстраполяции по траектории скважины; Ail- расстояние от последней до предыдущей точек измерений по траектории скважины. В исходном состоянии блок регистров 26 сброшен, т.е; значения хранимых в нем координат равны нулю, затем в этом блоке регистров хранятся координа.ты предыдущих точек. При поступлении координат первой точки в блок вычитания 27 последовательно вычисляется разность координат, которые подаются на вход блока умножения 28, на другой вход которого поступает частное от деления заданного интервала экстраполяции на последний шаг дискретизации, выработанное в блоке деления 31. Каждое произведение с выхода блока умножения 28 подается на сумматор 29, на другой вход которого поступает соответствующая координата. Полученные значения экстраполированных координат фиксируются в блоке регистров 30. Экстраполированное значениекоординат траектории и координаты- точки измерений передаются на второй и первый входы блбка II вычисления щага дискретизации соответственно, где по этим величинам вычисляется наклонная глубина и расстояние до следующей точки измерения. В блоке 11 (фиг. 4) определяются величины оптимального расстояния на траектории до следующего измерения, инаклонная глубина следующего измерения. Вь1числение шага дискретизации производится по соотношени1о (вывод этого соотношения приведен в приложении): T iTTi;
где , бл, б среднеквадратические погрешности измерения наклонной глубины, угла наклона, азимута соответственно. Величина sin определяется как:
..
где Jij, zj. - экстраполированное итекущее,
значение oopдинaты Z; лЕз- интервал экстраполяции.
в блоке вычитания 32 определяется разность Zj и i, которая в блоке деления 33 делится.на величину ДС. Полученное частное возводится в квадрат в блоке 34 возведения в квадрат. Полученная величина умножается в блоке умножения 35 на(о нараи ивается набд в сум.маторе 36. Затем из этой величины, поступающей на вход блока извлечения корня 37 извлекается квадратный корень, который умножается в блоке умножения 38б.. Полученная величина является оптимальным тагом дискретизации до следующего измерения и подается на выход устройства, а также на накапливающий сумматор 39, где как сумма шагов дискретизации накапливается наклонная глубина следующего измерения, т.е.
1 t + OnniUl I
которая поступает на выход устройства.
Так как траектория наклонно-направленной скважины является сравнительно гладкой кривой, то для сжатия данных может быть применена аппроксимация; при этом координаты каждой вычисленной точки поступают в блок аппроксимации 9, на его второй вход. Па его первый вход из блока вычисления тага дискретизации выдается величина тага дискретизации At.. Блок аппроксимаций 9 осуществляет кусочно-линейную аппроксимацию траектории и работает следующим образом. .
При поступлении на вход блока первой координат первой точки траектории их значения вместе- с наклонной глубиной точки заносятся в блок регистров 16 через блоки регистров 13 и 14, и, кроме того, координаты точки передаются через блок выдачи 25 на выход устройства. При поступлении координат второй точки значения координат вместе с величиной наклонной глубины с выхода блока II записываются в блоки 15 и 16. Эти-значений подаются на вход блока вычитания 17, откуда разность глубин заносится в регистр 18. Затем в блок вычитания 17 поступают попарно значения координат с блоков регистров 15 и 16, разность котоpbix делится в блоке деления 19 на разность глубин из регистра 18. Полученные частные заносятся в б,лок регистров 20. При поступлении координат и наклонной глубины третьей точки содержимое блока регистров 13 переписывается в блок регистров 14, а в блок регистров 13 заносятся значения координат и наклонной глубины третьей точки.
Значение координат с выходом блока регистров 13 и блока регистров 15 подаются попарно на входы блока вычитания 21, с выхода которого полученные разности принимаются на вход блока умножения 22, где каждая разность координат умножается на соответствующее частное из блока регистров 20, где он наращивается на величину соответствующей координаты из блока регистров 15. На выходе сумматора 23 получаются экстраполированные значения координат, которые в блоке сравнения 24 сравниваются с соответствующими координатами из блока регистров 13. Если все координаты различаются на величину, меньшую установленной погрешности аппроксимации, то выдачи координат через блок выдачи не производится, содержимое блока регистров 13 переписывается в блок регистров 14, а в блок регистров 13 заносятся координаты следующей точки траектории и ее наклонная глубина. Для этой точки вновь вычисляется экстраполированное значение координат с помощью блока вычитания 21, блока умножения 22, сумматора 23 и вновь производится сравнение посредством блока сравнения 24.
Если же хотя бы одна пара координат, поступившая в блок сравнения 24, различается на величину, большую погрешности аппроксимации Д, то сигнал с выхода блока сравнения 24 подается на блок выдачи 25, разрешая прохождение координат предыдущей из поданных на вход устройства точек из блока регистров 14 на выход блока аппроксимации. После этого содержимое блоков регистров 13 и 14 переписывается соответственно в блоки регистров 15 и 16 и вновь посредством блока вычитания 17, регистра 18, блока деления 19 производится вычисление частных и занесение их в блок регистров 20.
При поступлении координат следующих точек вновь осуществляется проверка ранее описанным- методом.
Таким,образом, из блока аппроксимации выдаются в запоминаюгций блок 6 только координаты концбв аппроксимирующих отрезков, а проверка координат точек осуществ.ляегся, по условию (например, для координаты X);
UjKC-XtkA гделлсс Х + (
-заданная погрепиюсть аппроксимации, причем Xj.i, .XJ - координаты исходного отрезка, хранимЕ.1е н регистрах 15 и 16, с продолжением
которого производится сравнение текущей координаты Xi;
1. л наклонная глубина
i,j,j-l-точки траектории.
Полученные координаты поступают для запоминания на первый вход запоминающе-, го блока 6.;
Текущее и экстраполированное значение координат подается с выхода блока экстраполяции 10 на первый вход анализатора координат 7. При поступлении этих координат анализатор координат 7 вырабатывает адреса, которые подаются на второй вход запоминающего блока 6. При этом адресом из запоминающего блока 6 выбираются числовые значения координат точек ранее пробуренных скважин, которые принимаются на второй вход анализатора коорди.нат 7. В процессе перебора координат точек траекторий ранее пробуренных скважин вычисляются расстояния до текущей и экстраполированной точки траектории/ При этом в каждой траектории скважины находится точка наиболее близкая к текущей, и точка ближайщая к экстраполирр.ванной. Значения координат обеих точек каждой траектори ранее пробуренной скважины, а также величины расстояний до текущей и экстраполированной точки соответственно передаются со вторых выходов анализатора координат на входы блока регистрации информации 8, выполненного на электроннолучевой трубке.
На экране блока 8 регистрации информации в масщтабе экрана отображаются текущая точка траектории буримой скважины и наибрлее близкие к ней точки стволов ранее пробуренных скважин, а также числовые значения координат текущей точки и расстояний между текущей точкой и наиболее близкими точками траекторий, либо отображается экстраполированная траектория буримой скважины и наиболее близкие к ней точки стволов ранее пробуренных скважин, а также числовые значения координат экстраполированной точки и расстояний между
текущей точкой и наиболее близких к йей точек стволов ранее пробуренных скважин. По изображению, сформированному на экране блока 8 регистрации информации, оператор имеет возможность оперативно определить положение текущей точки траектории буримой скважины и ранее пробуренных скважин, а также положение прогнозируемой точки траектории относительно ранее пробуренных скважин, что позволяет в случае необходимости принять меры для предотвращения аварийной ситуации.
Применение предложенного устройства позволяет повысить точность определения коордннат забоя, повысить надежность оперативного предупреждения пересечения стволов скважин.
Формула изобретения
Устройство для контроля положения за- боя по авт. св. № 604975, отличающееся тем, что,, с целью повышения точности определения координат забоя и повыщения надежности оперативного предупреждения пересечения стволов скважин за счет прогнозирования положения забоя, оно снабжено блоком S вычисления щага дискретизации, блоком сравнения, блоком аппроксимации и блоком экстраполяции, причем первые входы запоминающего блока подключены к выходу блока аппроксимации, первые входы которого подключены к выходам блока вычисления щага дискретизации, а вторые входы блока аппроксимации подключены к выходам блока пересчета координат, выход которого подключен к первым входам блока вычисления шага дискретизации и первым входам блока экстраполяции, вторые входы которого подключены к выходам блока вычисления шага дискретизации, при этом вьтходы блока экстраполяции подключены к первым входам анализатора координат и вторым входам блока вычисления шага дискретизации, выходы .которого соединены с первыми входами блока сравнения, вторые входы которого подключены к выходам аналого-цифрового преобразователя наклонной глубины, а выходы - к блоку пересчета координат.
J -- 4 -| J U 1
)4,yi,7.i
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения забоя | 1987 |
|
SU1439223A1 |
| Устройство для контроля положения забоя | 1991 |
|
SU1816856A1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
| Устройство для определения координат траектории скважины | 1976 |
|
SU602672A1 |
| Устройство для интерполяции и кусочно- линейной аппроксимации | 1977 |
|
SU734709A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2089854C1 |
| Устройство для адаптивной дискретизации | 1979 |
|
SU851416A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
tl yr, I f-J Ч I f/. V &
