00
сь
00
ел
(6), пересчета {7), аппроксимации (8) и запоминания (9) координат, анализатор координат 10 и блок регистрации координат 11, сумматор 12, блоки сравнения (13, 24, 25, 26), блоки задания шага дискретизации (14), запоминания проектных координат (15), расчета отклонений (17), масштабный блок (16), блоки усреднения (18), прогноза углов (21), прогноза координат (20), запоминания проектных углов (21), вычисления интенсив- ностей (22), задания предельных интенсив- ностей (23) и блок регистрации углов (27). В блоке 21 прогнозируются азимутальный и зенитный углы, а в блоке (7) - координаты траектории в конце интервала прогноза AL,
который задается блоком (16). Прогнозные значения координат в блоке (17) сравниваются с проектными из блока (15). определяется прогнозируемое отклонение траектории от проектной и результат заносится в блок (11). Текущие интенсивности пространственного изменения сравниваются в блоках (24-26) с предельными, которые вычисляются в блоке (23). Если текущая интенсивность превышает предельную, то блок (27) вырабатывает и передает в наземную систему управления сигнал для выработки управляющего воздействия на инструмент. 1 з.п.ф-лы, 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2089854C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2092791C1 |
| Устройство для контроля положения забоя | 1987 |
|
SU1439223A1 |
| Устройство для определения координат траектории скважины | 1980 |
|
SU909145A1 |
| Устройство для определения координат траектории скважины | 1976 |
|
SU602672A1 |
| Устройство контроля положения забоя | 1976 |
|
SU746094A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ТРАЕКТОРИИ СТВОЛА СКВАЖИНЫ | 1997 |
|
RU2110684C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
Использование: определение и контроль положения забоя при направленном бурении нефтяных и газовых скважин. Сущность изобретения: устройство содержит измерительные преобразователи азимутального (2) и зенитного (2) углов, угла установки отклонителя (3) и длины скважины (4), последовательно соединенные блоки фильтрации (5), запоминания измеренных углов
Изобретение относится к направленному бурению нефтяных и газовых скважин, а именно к устройствам для определения и контроля положения забоя.
Целью изобретения является расширение функциональных возможностей, повышение помехозащищенности и точности работы устройства.
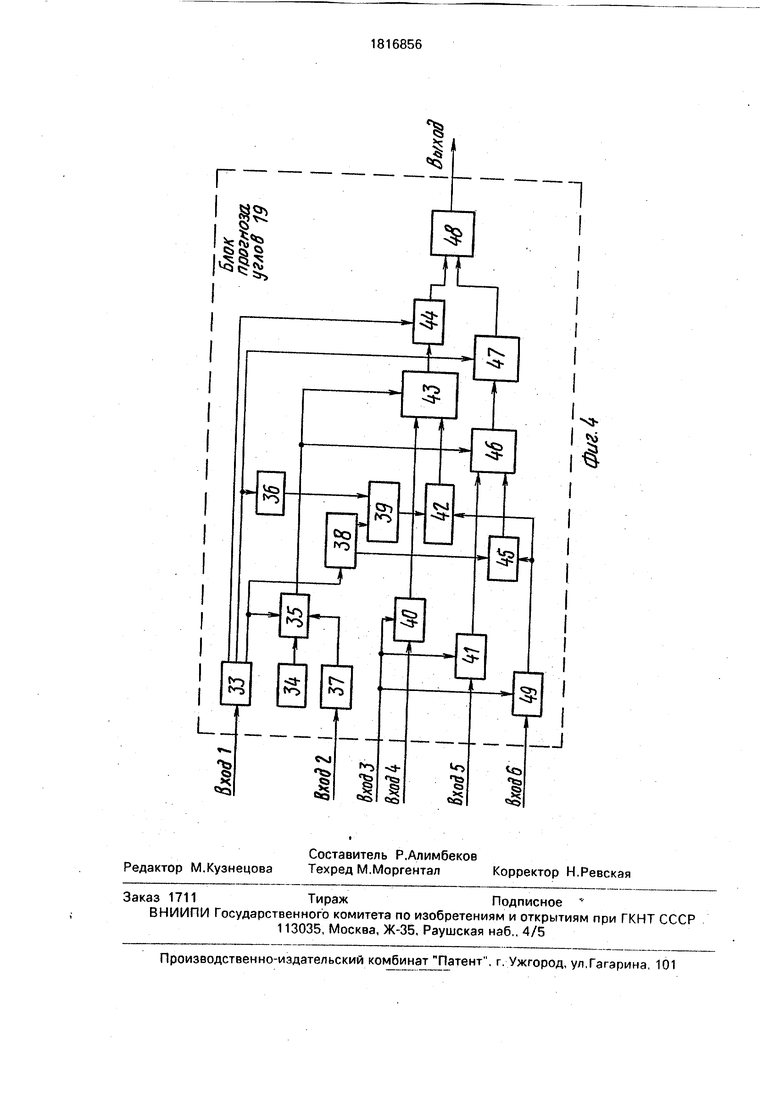
На фиг. 1 представлена функциональная схема заявляемого устройства; на фиг. 2 - функциональная схема измерительного преобразователя азимутального угла; на фиг. 3 - функциональная схема измерительного преобразователя длины скважины; на фиг. 4 - функциональная схема блока прогноза углов.
Устройство для контроля положения забоя (фиг. 1) включает измерительный преоб- разователь азимутального угла 1, измерительный преобразователь зенитного угла 2, измерительный преобразователь угла установки отклонителя 3, измерительный преобразователь длины скважины 4, блок фильтрации 5, блок запоминания измеренных углов 6, блок пересчета координат 7, блок аппроксимации координат 8, блок запоминания координат 9, анализатор координат 10, блок регистрации координат 11, сумматор 12, первый блок сравнения 13, блок задания шага дискретизации 14, блок запоминания проектных координат 15, масштабный блок 16, блок расчета отклонений 17, 5/зок усреднения 18, блок прогноза углов 19, блок прогноза координат 20, блок запоминания проектных углов 21, блок вычисления ивтенсивностей 22. блок задания предельных интенсивностей 23, второй блок сравнений 24, третий блок сравнения 25, четвертый блок сравнения 26, блок регистрации углов 27, причем выходы измерительных преобразователей азимутального угла 1. зенитного угла 2 и угла установки
отклонителя 3 соединены соответственно с первым, вторым и третьим входами блока фильтрации 5, первый, второй и третий выходы которого соединены соответственно с
первым, вторым и четвертым входами блока запоминания измеренных углов 6. первый выход которого соединен с первыми входами блока пересчета координат 7, блока усреднения 18, блока прогноза углов 19, блока
прогноза координат 20, блока вычисления интенсивностей 22 и третьим входом блока регистрации углов 27, второй выход блока запоминания измеренных углов 6 соединен с вторыми входами блока пересчета координат 7, блока усреднения 18, блока прогноза углов 19, блока вычисления интенсивностей 22, третий выход блока запоминания измеренных углов 6 соединен с третьим входом блока усреднения 18, выход блока пересчета координат 7 соединен с вторыми входами блока аппроксимации координат 8, анализатора координат 10 и блока прогноза координат 20, выход блока аппроксимации координат 8 соединен с первым входом блока запоминания координат 9, второй вход которого соединен с первым выходом анализатора 10, второй выход которого соединен с первым входом блока регистрации координат 11, второй вход которого соединен с выходом блока расчета отклонений 17, первый вход которого соединен с выходом- блока запоминания проектных координат 15, вход которого соединен с выходом сумматора 12, первый вход которого соединен
с первым входом блока аппроксимации координат 8. вторым входом блока сравнения 13, первым выходом блока задания шага дискретизации 14, входом блока запоминания проектных углов 21 и входом блока зэДания предельных интенсивностей 23, второй вход сумматора 12 соединен с выходом масштабного блока 16. третьим входом
блока прогноза углов 19 и третьим входом блока прогноза координат 20, выход измерительного преобразователя длины скважины 4 соединен с первым входом первого блока сравнения 13. выход которого соединен с третьими входами блока запоминания измеренных углов 6 и блока пересчета координат 7 и управляющим входом блока задания шага дискретизации 14. второй выход которого соединен с четвертым входом блока пересчета координат 7, входом масштабного блока 16 и четвертым входом блока вычисления интенсивностей 22, выход блока усреднения 18 соединен с третьим входом блока вычисления интенсивностей 22, первый выход которого соединен с четвертым входом блока прогноза углов 19 и первым входом второго блока сравнения 24, второй выход блока вычисления интенсивностей 22 соединен с пятым входом блока прогноза углов 19 и первым входом третьего блока сравнения 25, третий выход блока вычисления интенсивностей 22 соединен с шестым входом блока прогноза углов 19 и первым входом четвертого блока сравнения 26, выход блока прогноза углов 19 соединен с четвертым входом блока прогноза координат 20 и первым входом блока регистрации углов 27, выход блока прогноза координат 20 соединен с первым входом анализатора координат 10 и вторым входом блока расчета отклонений 17, выход блока запоминания проектных углов 21 соединен с вторым входом блока регистрации углов 27, четвертый, пятый и шестой входы которого соединены соответственно с йыходами второго 24, третьего 25 и четвертого 26 блоков сравнения, первый, второй и третий выходы блока задания предельных интенсивностей 23 соединены соответственно с вторыми входами второго 24, третьего 25 и четвертого 26 блоков сравнения.
Измерительный преобразователь азимутального угла 1 содержит последовательно соединенные первичный инклинометриче- ский преобразователь азимутального угла 29 и аналого-цифровой преобразователь 30. В качестве первичного инклинометрического преобразователя азимутального угла 29 может использоваться, например, инклиномет- рический преобразователь феррозондового типа, а аналого-цифровой преобразователь 30 может быть выполнен на основе интегральной микросхемы типа К 572ПВ1.
Измерительный преобразователь зенитного угла 2 и измерительный преобразователь угла установки отклонителя 3 могут быть выполнены по функциональной схеме аналогично приведенной на фиг. 2.
Измерительный преобразователь длины скважины 4 содержит последовательно соединенные первичный преобразователь длины скважины 31 и аналого-цифровой 5 преобразователь 32. В качестве первичного преобразователя длины скважины 31 и может использоваться, например, измеритель, входящий в состав комплекса средств наземного контроля и управления процессом
0 бурения нефтяных и газовых скважин СКУБ- М1.
Блок прогноза углов 19 содержит первый сдвиговый регистр 33, задатчик 34 порота . изменения угла установки
5 отклонителя, пороговый элемент 35. синусный функциональный преобразователь 36, второй сдвиговый регистр 37, синусно-коси- нусный функциональный преобразователь 38, блок деления 39, первый 40, второй 41 и
0 третий 42 блоки умножения, первый переключатель 43, первый сумматор блока прогноза углов 44, четвертый блок умножения 45, второй переключатель 46, второй сумматор блока прогноза углов 47, коммутатор 48,
5 пятый блок умножения 49. Первый вход блока прогноза углов 19 подключен к входу первого сдвигового регистра 33. первый выход которого соединен с первым входом первого сумматора блока прогноза углов 44, вы0 ход которого соединен с первым входом коммутатора 48, выход которого является выходом блока прогноза углов 19, второй вход которого является входом второго сдвигового регистра 37, выход которого со5 единен с третьим входом порогового элемента 35, второй вход которого соединен с выходом задатчика 34, второй выход первого сдвигового регистра 33 соединен с входом синусного функционального
0 преобразователя 36 и первым входом второго сумматора блока прогноза углов 47, третий выход первого сдвигового регистра 33 соединен с первым входом порогового элемента 35 и входом синусно-косинусного
5 функционального преобразователя 38, выход порогового элемента 35 соединен с третьими входами первого 43 и второго 46 переключателей, выход первого переключателя 43 соединен с вторым входом первого
0 сумматора блока прогноза 44. первый выход синусно-косинусного функционального преобразователя 38 соединен с первым входом четвертого блока умножения 45, выход которого соединен с вторым входом второго пе5 реключателя 46, выход которого соединен с вторым входом второго сумматора блока прогноза углов 47, выход которого соединен с вторым входом коммутатора 48, третий вход блока прогноза углов 19 соединен с первыми входами первого 40. второго 41 и
пятого 49 блоков умножения, четвертый вход блока прогноза углов 19 соединен с вторым входом первого блока умножения 40, выход которого соединен с первым входом первого переключателя 43, второй вход которого соединен с выходом третьего блока умножения 42, первый вход которого соединен с выходом блока деления 39, второй вход которого соединен с выходом синусного функционального преобразователя 36, а первый вход - с вторым выходом синусно- косинусного функционального преобразователя 38, пятый вход блока прогноза углов 19 соединен с вторым входом второго блока умножения 42, выход которого соединен с первым входом второго переключателя 46, шестой вход блока прогноза углов 1.9 соединен с вторыми входами третьего 42 и четвертого 45 блоков умножения.
Функции блока фильтрации 5. блока запоминания измеренных углов б, блока пересчета координат 7, блока аппроксимации координат 8, блока запоминания координат 9, анализатора координат 10, сумматора 12, блока сравнения 13, блока задания шага дискретизации 14, блока запоминания проектных координат 15, масштабного блока 16, блока расчета отклонений 17, блока усреднения 18, блока прогноза углов 19, блока гтрогноза координат 20, блока запоминания проектных углов 21, блока вычисления ин- тенсивностей 22, блока задания предельных интенсивностей 23, второго 24, третьего 25 и четвертого 26 блоков сравнения выполняет стандартного микро-ЭВМ 28, например, типа ЕС-1841.
В блоке фильтрации 5 осуществляется запись и сглаживание измеренных углов в точке с номером I, при этом используется п значений измерений углов в точке i. Сглаживание производится по формулам
0|
J 1
щ-Јflj
fl,
{/ - -г-
р
Ј w j i
где oi, 6, fl - азимутальный, зенитный углы и угол установки отклонителя соответственно.
В простейшем случае . Такое сглаживание позволяет уменьшить погрешности выполненных измерений.
45
В блоке запоминания измеренных углов 6 производится запись отфильтрованных значений углов в точках i, i-1, i-2. Запись производится по сигналу логическая 1, по5 ступающему на третий вход блока запоминания измеренных углов 6 с выхода первого блока сравнения 13. На первый выход блока 6 поступают значения углов в точке i, на второй - в точке 1-1, на третий - в точке I-2.
10 На выходы значения углов поступают в следующем порядке: первым - азимутальный угол а, вторым - зенитный угол В, третьим - угол установки отклонителя р.
В блоке пересчета координат 7 произво15 дится вычисление координат по результатам измерений углов, выполненных в начале и конце интервала AI, по формулам
xi xi-i + AXI,. ; (4)
-;- У УИ + Дук(5)
20 zi zi-i+ А.(6) где xi, yi, zi - декартовы координаты 1-й точки траектории скважины;
I - шаг дискретизации по длине скважины; ; . . .. . ;
25AXJ, Ayi, AZI - приращения координат, рассчитываемые по формулам
Axi - (sin #,--1 cos «i -1 + -f-.$in.6i - cos«i), .(7) Ayi -у- (sin$ - i sin a -1 + sine1, sin «i), (8) AZI - 4p COS ft - 1 + COS 6|), (9)
35 Где Oj, at -1,;6|, 6 - 1 - азимутальные и зенитные углы в i и i-1 точках.
Вычисление производится по сигналу логическая Т1, поступающему на третий вход блока пересчета координат 7 с выхода первого блока сравнения 13.
В блоке аппроксимации координат 8 осуществляется кусочно-линейная аппроксимация траектории скважины. С его выхода в блок запоминания координат 9 выдаются только координаты концов аппроксимирующих отрезков, а проверка координат точек осуществляется по условию
I XyZaKC-XyZi I A(10)
где - ;..,. - . . xyz-экс xyzj + (li - Ij) xyzj -xyzj -i
40
50
j - I - 1
(11)
Д- заданная погрешность аппроксимации;
xyzj-i, xyzj - координаты исходного отрезка, с продолжением которого производится сравнение текущей координаты xyzi .
It,). j-1 длина скважины,
В блоке запоминания координат 9 осуществляется запись и хранение координат скважин.
Анализатор 10 определяет расстояние от очередной прогнозируемой точки бурящейся скважины, рассчитанной в блоке прогноза координат 20, до ближайшей из ранее пробуренных скважин с целью прогнозирования возможных пересечений.
В сумматоре 12 рассчитывается длина L, равная,
L. lb+ AL,(12) где Гь - заданная длина скважины от устья до текущей точки замера:
Д1 - интервал прогноза.
В первом блоке сравнения 13 производится сравнение текущей длины скважины I, измеренной измерительным преобразователем длины скважины 4, и заданной дли- ны скважины ь. формируемой блоком задания шага дискретизации 14. На выходе блока сравнения 13 формируется сигналом логическая 1 в случае I ь и сигнал логический О, если I /1ь.
Блок задания шага дискретизации 14 задает на своем втором выходе шаг дискретизации по длине скважины А, а на первом выходе-заданную длину скважины отустья до текущей точки замера ь, причем
lb Jbi-i+ At(13) где ltji-1 - длина скважины от устья до предыдущей точки замера.
В блоке запоминания проектных координат 15 осуществляется хранение коорди- Nat проектногд профиля бурящейся скважины в виде таблицы. В-ыбор требуемых координат осуществляется на основе линейной интерполяции по длине скважины, согласно (11),.
В масштабном блоке 16 осуществляется вычисление интервала прогноза AL
AL- Al. k,; v (14) где k - масштабный коэффициент/
Изменяя масштабный коэффициент k, можно задавать различные величины интервала прогноза.
Блок расчета отклонений 17 служит для расчета отлонения R траектории бурящейся скважины от проектной в конце интервала прогноза AL, при этом
;;... R v(x-хпр)2 + бГ-упР)2 + (-znp)2
и,О)
где х, у, z - координаты проектного профиля в конце интервала прогноза,
Хпр, Упр, 2Пр - прогнозные значения координат в конце интервала прогноза.
если I р| - р( - 1 ( F- (17)
В блоке усреднения 18 производится расчет среднего значения зенитного угла вг. по результатам измерения в i-2, i-1, i точках по формуле
Л.4±1Ц1±« 2.(16)
В блоке прогноза углов 19 (фиг. 4) производится расчет прогнозных значений азимутального Qhp и зенитного 6пр углов в конце интервала прогноза по формулам
,SintfO
Onp Oi+AL-lj, -jiffy. (
0npi &,+&- -ijl Onpi 0) 4- AL iti, 1. ..
J. если I p - f - 1 F-
6npi 9, + 4L - i(9i J(18) где f., ig,.- текущие интенсивности искривления по азимуту и зениту соответственно;
Ijl - текущая интенсивность пространственного искривления;
i.i-1 - угол установки отклонителя;
Ј- порог изменения угла установки отклонителя.
Поступающие последовательно на первый вход блока прогноза углов 19 значения углов сс, ft, р первым сдвиговым регистром 33 сдвигаются таким образом, что на его первый выход поступает значение CQ, на второй выход - ф, на третий выход - р. Аналогично, поступающие последовательно на второй вход блока прогноза углов 19 значения углов ом, $-1, вторым сдвиговым регистром 37 сдвигаются таким образом, что на его выход поступает только значение
Разность по модулю I (р сравнивается в пороговом элементе 35 со значением порога изменения угла установки отклонителя, поступающим из задатчика 34.
В случае выполнения условия р - Ј на выходе порогового элемента 35 формируется сигнал логическая 1, под действием которого первый 43 и второй 46 переключатели коммутируют на свои выходы соответственно выход третьего 42 и пятого 45 блоков умножения. В противном случае на выходе порогового элемента 35 формируется сигнал логический О, под действием которого переключатели 43 и 46 коммутируют на свои выходы, соответственно, выход первого 40 и второго 41 блоков умножения.
Коммутатор 48 осуществляет последовательное подключение к выходу блока прогноза углов 19 сумматора 44, на выходе которого формируется прогнозное значениеопр, и сумматора 47, на выходе которого формируется прогнозное значение впр.
Таким образом, при бурении прямыми компоновками прогноз углов аи#осущест- вляется по формулам (18). В этом случае с выхода измерительного преобразователя угла установки отклонителя 3 поступает постоянный сигнал pv будет выполняться условие (pt - рм I Е .При бурении с отклонителем возможны два случая. Если в процессе бурения происходят малые изменения угла установки отклонителя, то, как и в случае прямой компоновки, прогноз углов осуществляется по формулам (18). При сильных изменениях углы установки отклонителя, (например, переход от набора зенитного угла в к его снижению) прогноз осуществляется по модели, задаваемой формулами (17), которая учитывает влияние изменения угла установки отклонителя р на изменение углов а и в, что повышает точность прогноза. Величина порога е выбирается в пределах 10...15 градусов.
В блоке прогноза координат 20 производится вычисление прогнозных значений координат по результатам измерения углов в начале интервала прогноза Д и прогнозу углов аПр, впр в конце интервала, по формулам
xnp xi + ДхПр1,(19) Упр yi + Дупр, (20) znp zi + Aznpi, (21)
Дхпр -Tj- (Sin $ cos a +
+ sin 0r,pi cos Onpi),(22)
ДупР1 -. От (sin в sin a +
+ sin &,pi sin «npO,(23)
Aznpi r (cos fl + cos ftipi). (24)
В блоке запоминания проектных углов 21 осуществляется хранение значений азимутального «и зенитного в углов проектного профиля бурящейся скважины в виде таблицы. Выбор требуемых углов осуществляется на основе линейной интерполяции по длине скважины, аналогично (11).
В блоке вычисления интенсивностей 22 производится расчет текущих интенсивностей искривления по азимуту , искривления по зениту 9{ и пространственного искривления ;{по результатам изменений углов, выполненных в начале и конце интервала Д1, и результату расчета среднего зенитного угла 6с), по формулам
I - . (25)
AI а-й-1
--5Г
(26)
11; 2 arcsin Vsln2b:f S|n2. S|n20d
В блоке задания предельных интенсивностей 23 производится задание предель(27)
ных интенсивностей
U
1
«9 Ч - зависимости от текущей длины скважины 1ь
в соответствии с выражениями
. .,. ж
Ч
. . Чи
It 6 ti
0 й 1ь есм ч&ч,
л
1,0
Ь I/ -У
i i Г«-;
еслм
V
&°П
°ft--(
К28)
15
20
25
30
35
-предельные интенсивности искривления по азимуту, зениту и пространственного искривления, соответственно, на i-м участке (,.,.п) проектного профиля скважины;
1ы - заданная длина 1-го участка проектного профиля скважины.
Во втором 24, третьем 25 и четвертом 26 блоках сравнения производится сравнение текущих и предельных интенсивностей со- ответственно азимутального, зенитного и пространственного искривления. Если текущая интенсивность искривления превышает предельно допустимую, то на выходе соответствующего блока сравнения появляется сигнал логическая 1, в противном случае на выходах блоков сравнения 24, 25, 26 поддерживается сигнал логический О.
В качестве блока регистрации координат 11 может использоваться алфавитно- цифровое печатающее устройство, например типа СМ6337, а в качестве блока регистрации углов 27 - алфавитно-цифровой дисплей, например типа Электроника
: 6305,.. :..... -:,;- .-.-. :..::
40 Устройство работает следующим обра- ; ЗОМ. : : :. - : .;:.... . . / :...:- ./.
Вначале, когда измерительные преобразователи 1-3 находятся в устье скважины, производится сброс в нуль регистров и маторбв блоков устройства, на выходе измё- ритёльного преобразователя длины скважины 4 устанавливается сйгнал,соОТбет- ствующий , а на первом выходе блока задания шага дискретизации - сигнал .
50 На выходе первого блока сравнения 13 по является сигнал логическая 1, разрешающий запись отфильтрованных углов в блок запоминания измеренных углов 6, расчет координат в блоке пересчета координат 7 и
55 приращение длины ь, согласно выражению (13), в блоке задания дискретизации 14.
Второй и последующие моменты записи сигналов с выходов блока фильтрации 5, соответствуют равенству заданной глубины ь, поступающей с первого выхода блока задания шага дискретизации 14 текущей глубине , поступающей с выхода измерительного преобразователя длины скважины 4.
Только при этом условии блок 13 выдает разрешение на запись информации блоком б, пересчет координат блоком 7 и наращивание длины Ib; в блоке 14, Вычисление координат в блоке 7 производится в соответствии с выражениями (4)-(9). При перемещении измерительных преобразователей 1, 2 и 3 на интервал Д, определяемый блоком задания шага дискретизации 14, производится запись измеренных и отфиль- трованных в блоке 5 значений углов в блок 6. При этом все три записанные значения зенитного угла точек с номерами Ь2, 1-1, i подаются в блок усреднения 18, где производится расчет среднего значения зе- .нитного угла 9С по формуле (1.6).
Координаты траектории в блоке 7 и интенсивности .искривления в блоке 22 определяются только по отсчетам азимутального и зенитного углов в И и i точках по форму- лам (4)-(9) и (25)-(27) соответственно.
По отсчетам азимутального, зенитного углов иугла установки отклонителя в i точке, а также по результатам вычисления в блоке 22 интенсивностей искривления, в блоке 19 осуществляется прогноз азимутального и зенитного углрв на конец интервала прогноза AL в соответствии с выражениями (17), (18). А по отсчетам азимутального и зенитного углов в i точке и их прогнозным значе- ниям в блоке 20 в соответствии с выражениями (19)-(24) осуществляется прогноз координат траектории в конце интервала прогноза At, Интервал прогноза задается масштабным блоком 16 и отсчиты- вается отзначения длины скважины в Iточке измерения,
Прогнозные значения координат поступают в блок 17, где они сравниваются с координатами проектной траектории, и в соответствии с выражением (15) рассчитывается прогнозируемое отклонение R траектории бурящейся скважины от проектной в конце интервала прогноза AL. Прогнозируемое отклонение R регистрируется в блоке 11.
Выбор координат проектной траектории осуществляется в блоке 15 на основе линейной интерполяции по длине скважины согласно (11), а длина скважины, соответст- вующая концу интервала прогноза вычисляется в сумматоре 12. Рассчитанные в блоке 7 значения координат подаются в блок 8 аппроксимации, который осуществляет кусочно-линейную аппроксимацию траектории скважины в соответствии с выражениями (10), (11). Из блока 8 аппроксимации в блок 9 запоминания координат выдаются только координаты концов аппроксимирующих отрезков. Прогнозные значения координат с выхода блока 20 и их текущие значения из блока 7 поступают на первый и второй входы анализатора координат 10, который вырабатывает адреса, поступающие на второй вход блока запоминания координат 9. Блок 9 выбирает числовые значения координат траекторий ранее пробуренных скважин, поступающие на третий вход анализатора 10. С выхода анализатора 10 на блок регистрации 11 подаются прогнозные и текущие координаты бурящейся скважины и наиболее близкой из ранее пробуренных.
С целью контроля интенсивности искривления траектории скважины в блоках 24, 25, 26 производится сравнение вычисленных в блоке 22 текущих интенсивностей азимутального, зенитного и пространственного искривления с их предельными для данной длины скважины значениями, которые вычисляются в блоке 23, согласно (28). Если текущая интенсивность превышает предельную, то на выходе соответствующего блока сравнения формируется сигнал логическая 1, который поступает в блок 27, где вырабатывается сигнал о превышении предельно допустимой интенсивности искривления, поступающий в наземную систему управления. Если текущая интенсивность не превышает предельную, то на выходах, блоков сравнения 24-26 формируется сигнал логический О.
В блоке 27 производится также регистрация прогнозных значений азимутального и зенитного углов, формируемых в блоке 19, . и проектных углов скважины, формируемых для данной длины скважины в блоке 21,
Таким образом, по сравнению с прототипом, в заявляемом устройстве расширены функциональные возможности за счет обеспечения измерения угла установки отклонителя на забое, контроля текущей интенсивности искривления скважины и сравнения ее с предельно допустимой, прогноза отклонения фактического профиля бурящейся скважины от проектного.
Применение фильтрации сигналов, поступающих с забоя в азимутальный,зенитный угол, угол установки отклонителя позволяет снизить зашумленность этих сигналов, и, тем самым, повысить помехозащищенность устройства. А использование отфильтрован-, ных значений углов для расчета координат траектории позволяет повысить точность устройства.
Кроме того, использование прогноза изменения азимутального а и зенитного в углов по модели, которая учитывает влияние изменения угла установки отклонителя р на характер поведения углов а. и в при турбинном бурении с отклонителем позволяет повысить точность прогноза, а значит и точность работы устройства.
Применение предлагаемого устройства позволяет снизить эксплуатационные затраты на бурение скважин за счет высоких эксплуатационных возможностей устройства и его высокой точности,
Формула изобретения
Запоминания проектных координат, масштабный блок, блок расчета отклонений,блок вычисления интенсивностей, блок задания предельных интенсивностей, второй, третий и четвертый блоки сравнения, причем выходы измерительных преобразователей азимутального угла, зенитного угла и угла установки отклонителя соединены соответственно с первым, вторым и третьим входа0 ми блока фильтрации, первый, второй и третий выходы которого соединены соответственно с первым, вторым и четвертым входами блока запоминания измеренных углов, первый выход блока запоминания измерен5 ных углов соединен с первым входом блока прогноза углов, первым входом блока прогноза координат, первым входом блока вычисления интенсивностей и третьим входом блока регистрации углов, второй выход бло0 ка запоминания измеренных углов соединен с вторым входом блока прогноза углов и вторым входом блока вычисления интенсивностей. выход сумматора соединен с входом блока запоминания проектных коор5 динэт, выход которого соединен ,с первым входом блока расчета отклонений, выход которого соединен с вторым входом блока регистрации координат, выход первого блока сравнения соединен с управляющим вхо0 дом блока задания шага дискретизации, второй выход которого соединен с четвертым входом блока пересчета координат, входом масштабного блока и четвертым входом блока вычисления интенсивностей, первый
5 выход блока задания шага дискретизации соединен с первым входом сумматора, второй вход которого соединен с выходом масштабного блока, соединенным с третьим входом блока прогноза углов и третьим вхо0 дом блока прогноза координат, выход блока усреднения соединен с третьим входом блока вычисления интенсивностей, первый, второй и третий выходы которого соединены соответственно с четвертым, пятым и
5 шестым входами блока прогноза углов, выход которого соединен с четвертым входом блока прогноза координат, выход которого соединен с вторым входом блока расчета отклонений, выход блока задания шага дис0 кретизации соединен с входом блока задания предельных интенсивностей, первый, второй и третий выходы которого соединены соответственно с вторыми входами второго, третьего и четвертого блоков
5 сравнения, первый, второй и третий выходы блока вычисления интенсивностей соединены соответственно с первыми входами второго, третьего и четвертого блоков сравнения, выходы второго, третьего и четвертого блоков сравнения соединены соответственно с четвертым, пятым и шестым входами блока регистрации углов.
первого и второго переключателем, выход первого переключателя соединен, г. вторым входом первого сумматора, первый выход синусно-косинусного функционального преобразователя соединен с первым входом четвертого блока умножения, выход которого соединен с вторым входом второго переключателя, выход которого соединен с вторым входом второго сумматора, выход которого соединен с вторым входом коммутатора, третий вход блока прогноза углов соединен с первыми входами первого, второго и пятого блоков умножения, четвертый вход блока прогноза углов соединен с вторым входом первого блока умножения, выход которого соединен с первым входом первого переключателя, второй вход которого соединен с выходом третьего блока умножения, первый вход которого соединен с выходом блока деления, второй вход которого соединен с выходом синусного функционального преобразователя, а первый вход с вторым выходом синусно-косинусного функционального преобразователя, пятый вход блока прогноза углов соединен с вторым входом второго блока умножения, выход которого соединен с первым входом второго переключателя, шестой вход блока прогноза углов соединен с вторым входом 0 пятого блока умножения, выход которого соединен с вторыми входами третьего и четвертого блоков умножения.
0
5
0
5
У
фиг. I
J
Фиг.З
Xh
4
| Устройство контроля положения забоя | 1976 |
|
SU746094A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Авторское свидетельство СССР | |||
| Устройство для контроля положения забоя | 1987 |
|
SU1439223A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Г П | |||
