i4iib О5 tv9 Ф
Изобретемте относится к маииностр ению, в частности к средствам гидроавтоматики, и может быть нспальзова- но в приводах дроссельного регулирования скорости большегрузных роботов ма1шпуляторов и кантователей.
Ноль изобретения - минимизагщя подводимой мощности.
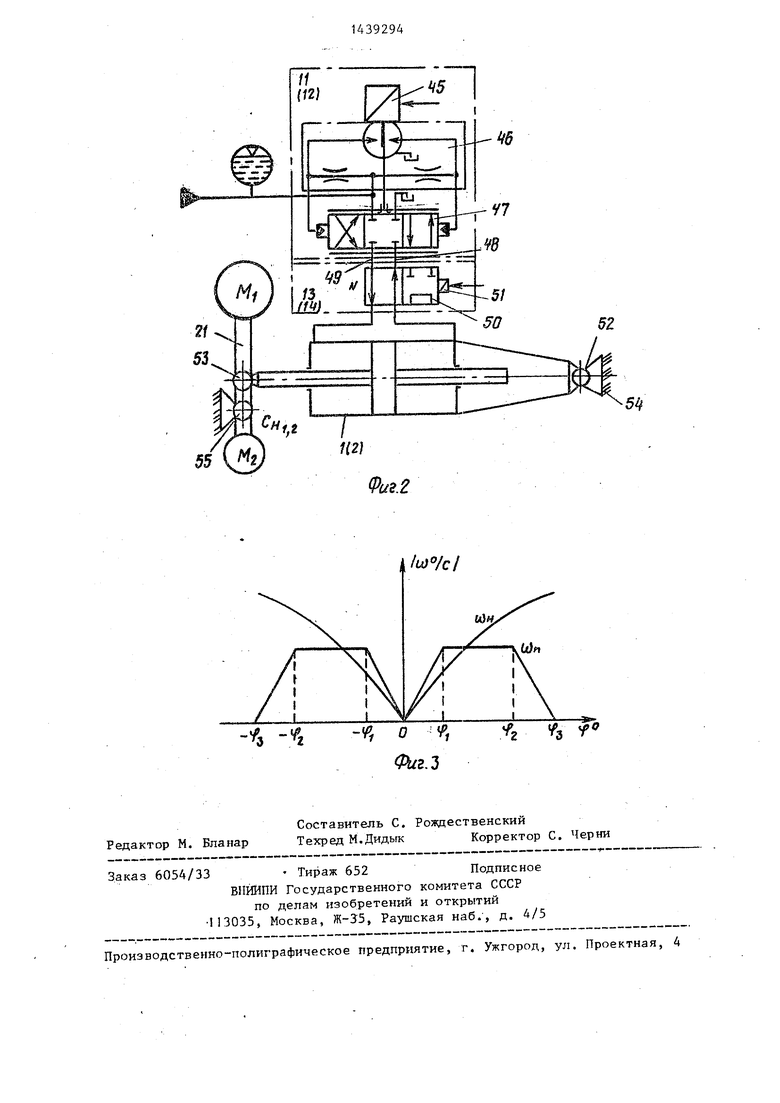
На фиг. 1 представлена принципиальная электрогидравлическая схема привода; на фиг. 2 - гидравлическая схема подключения электрогидравли- ческого усилителя мощности и клапана кольцевания к рабочим полостям гидро двигателя; на фиг. 3 - тахограмма движения нагрузки и привода применительно к кантователям.
Многоканальный гидропривод (фиг. 1) содержит два гидродвигателя 1 и 2 с установленными в них поршням
3 и 4 с двусторонними штоками 5 и 6 с образованием рабочих полостей 7, 8 и 9, 10. Гидродвигатели 1 и 2 снабжены электрогидравлическими усилителями 11 и 12 мощности и клапанами 13 и 14 кольцевания. Подвод энергии к. гидродвигателям 1 и 2 осуществляется от насосов 15 и 16 с предохранительными клапанами 17 и 18 и гидроаккумуляторами 19 и 20. Штоки 5 и 6 гидрдвигателей 1 и 2 связаны с нагрузкой 21. Кроме того, сервопривод содержит систему управления (не обозначена), включающую задающее устройство 22, усилители 23 и 24 сигналов, датчики 25, 26 и 27, 28 соответственно положения и скорости, сумматоры 29-40, дифференцирующие звенья 41 и 42 и квор мэлементы 43 и 44.
Каждый из электрогидравлических усилителей 11 или 12 мощности содержит электромеханический преобразователь 45, гидроусилитель 46 типа сопло-заслонка с механической обратной связью по положению четырехкромочног дросселирующего золотника 47, исполнительные линии 48 и 49 котор.ого подключены через клапан 13 или 14 кольцевания к рабочим полостям 7, 8 и 9, 10 гидродвигателя 1 или 2. Клапаны 13 и 14 кольцевания выполнены в виде четырехлинейного двухпозиционно
Далее сигнал о перемещении от задающего устройства 22, пройдя сумматоры 29, 31, 30 и 32 и усилители 23 и 24 сигналов, поступает на входы электромеханических преобразователей 45 электрогидравлических усилителей 11 и 12 мощности. Золотники 47 усилителей 11 и 12 перемещаются на величину, пропорциональную полярности и величине входного сигнала. При движего гидрораспределителя 50 с управляющим входом, например электромагни-дд нии нагрузки 21 по часовой стрелке ра том 51. Гидродвигатели 1 и 2 с по-бочая ж щкocть от насоса 16 постумощью шарниров 52 и 53 крепятся к ос- пает через усилитель 12 и клапан 14 нованию 54 и нагрузке 21. Последняя условно представлена s виде двух сос
кольцевания в рабочую полость 9 гидродвигателя 2, а его рабочая полость
o
0
5
з
редоточениых масс М и М, ст язанных с основанием 54 шарниром 55. Гидроаккумуляторы 19 и 7.0 устаиов,пены в непосредственной близости от входов , 56 и 57 усилителей 11 и 12.
При отработке цикла целесообразно выделить три существенно отличающихся периода (фиг. 3): разгон (от О до tf ) и установившееся движение или-движение с малоизменяющейся скоростью (бт (| до 1/2), интенсивное торможение (от ( до (/), колебания в зоне фиксации нагрузки.
Применительно к кантователям тахограмма движения нат рузки представляет синусоидальный закон. Если момент инерции от массы М, больше момента инерции от массы М , то при движении нагрузки 21 по часовой стрелке ее угловая скорость увеличивается и принимает максимальное значение в точке .
Жесткости опор и проводки (фиг. 1) условно представлены в виде Соп ,
(Д
л
Многоканальный гидропривод работает следующим образом.
R исходном положении нагрузка 21 занимает вертикальное положение, а рабочие полости 7, 8 и 9, 10 гидродвигателей 1 и 2, перекрыты. Вертикальное положение нагрузки 21 контролируется датчиками 25 и 26 положения. Сигнал от датчика, например 25, также поступает через задающее устройство 22 на электромагнит 51 клапана 13 кольцевания, гидрораспределитель 50 которого переключается, занимая позицию, при которой исполнительные линии 48 и 49 перекрыты, а рабочие полости 7 и 8 сообщены одна с другой.
Далее сигнал о перемещении от задающего устройства 22, пройдя сумматоры 29, 31, 30 и 32 и усилители 23 и 24 сигналов, поступает на входы электромеханических преобразователей 45 электрогидравлических усилителей 11 и 12 мощности. Золотники 47 усилителей 11 и 12 перемещаются на величину, пропорциональную полярности и величине входного сигнала. При движении нагрузки 21 по часовой стрелке ра бочая ж щкocть от насоса 16 посту пает через усилитель 12 и клапан 14
кольцевания в рабочую полость 9 гидродвигателя 2, а его рабочая полость
5
1C
20
10 при этом связана со слипом. Позиционная и инерционная составляющие нагрузки 21 вблизи точки О (фит . 2) малы, и привод преодолевает в основном диссипативные силы в рабочем механизме. Поскольку рабочие полости
7и 8 гидродвигателя 1 закольцованы, а исполнительные линии 48 и А9 перекрыты, при перемещении золотника 47 электрогидравлического усилителя 11 мощности расход рабочей жидкости в полости 7 и 8 не поступает. При этой происходит накопление энергии, поступающей от насоса 15, в гидроаккумуляторе 19,
Аналоговые сигналы датчиков 25-28 И задающего устройства 22 формируют по каждому гидродвигателю 1 и 2 управляющий сигнал, включающий общую для всех гидродвигателей 1 и 2 и индивидуальную составляющие. Кворум- элементы 43 и 44 формируют осреднен- ный сигнал соответственно датчиков 25, 26 положения и датчиков 27, 28 скорости. Лалее осредненный сигнал от датчиков 25 и 26 положения проходит сумматоры 33, 34, 29 и 30, где и формируются индивидуальные составляющие путем алгебраического суммирования осредненного сигнала с сигналом датчиков 25 или 26 положения того же гидродвигатепя 1 или 2 и общая составляющая путем суммирования осредненного сигнала с сигналом от задающего устройства 22. Осредненный сигнал от квормуэлемента 44, пройдя сумматоры 35 и 36, вырабатывает индивидуальные составляющие скорости каждого гидродвигателя 1 и 2, которые, 40 продця сумматоры 37 и 38, сравниваются с заданным сигналом скорости, поступающим от задающего устройства 22,Ошибка по скорости каждого гидродвигателя 1 И 2 направляется в соответствующий усилитель 23 и 24 и также на входы дифференцирующих звеньев 41 и 42, которые формируют ошибку по ускорению.
8сумматорах 39 и 40 происходит кораккумулятора 19 подается в полость 8. Таким образом, на этапе торьгожеиия, когда позиционная составляющая нагруа- ка 21 принимает максимальное значение, в работе участвуют оба гидродвигателя 1 и 2,
При движении нагрузки от i/ до О активно работают оба гидродвигателя 1 и 2,
Далее цикл повторяется, но при движении нагрузки 21 против часовой стрелки.
Сигнал от задающего устройства 22 15 при движении от О до - у поступает на электромагнит 51 клапана 14 кольцевания. При этом происходит накопление энергии в гидроаккумуляторе 20. На этапе движения от - if до -(/ активно работают оба гндродвигателя 1 и 2.
Технико-экономическая эффективность изобретения состоит в меныпе- 25- НИИ установочной мощности насосов за счет уменьщения взаимонагружения и возможности накопления энергии на отдельных этапах работы механизма.
30 Формула изобретения
Многоканальный гидропривод, содержащий по меньшей мере два соединенных с общей нагрузкой гидродвигателя, два
25 электрогидравлических усилителей мощности, исполнительные линии из которых сообщены с рабочими полостями соответствующего гидродвигателя и управляемыми клапанами кольцевания, и систему управления, включающую задающее устройство, усилители сигналов, датчики положения н скорости, отличающийся тем, что, с целью минимизации подводимой
45 мощности, каждый из клапанов кольцевания выполнен в виде четырехпинейно- го двухпозиционного гидрораспределителя, установленного с возможностью
перекрытия исполнительных линий в рекция входного сигнала по ускорению, 50 позиции кольцевания рабочих полостей. При подходе к точке сигнал, по-при этом его управлякнций вход связан
с датчиком положения через задакяцее устройство, а на входе каждого из электрогидравлических усилителей мощ- 55 ности установлен гидроакку улятор.
ступающий на электромагнит 51 клапана 13, обнуляется и его гидрораспределитель 50 занимает исходную (фиг, 2) позицию. Рабочая жидкость от гидро
аккумулятора 19 подается в полость 8. Таким образом, на этапе торьгожеиия, когда позиционная составляющая нагруа- ка 21 принимает максимальное значение, в работе участвуют оба гидродвигателя 1 и 2,
При движении нагрузки от i/ до О активно работают оба гидродвигателя 1 и 2,
Далее цикл повторяется, но при движении нагрузки 21 против часовой стрелки.
Сигнал от задающего устройства 22 при движении от О до - у поступает на электромагнит 51 клапана 14 кольцевания. При этом происходит накопление энергии в гидроаккумуляторе 20. На этапе движения от - if до -(/ активно работают оба гндродвигателя 1 и 2.
Технико-экономическая эффективность изобретения состоит в меныпе- НИИ установочной мощности насосов за счет уменьщения взаимонагружения и возможности накопления энергии на отдельных этапах работы механизма.
Формула изобретения
Многоканальный гидропривод, содержащий по меньшей мере два соединенных с общей нагрузкой гидродвигателя, два
электрогидравлических усилителей мощности, исполнительные линии из которых сообщены с рабочими полостями соответствующего гидродвигателя и управляемыми клапанами кольцевания, и систему управления, включающую задающее устройство, усилители сигналов, датчики положения н скорости, отличающийся тем, что, с целью минимизации подводимой
мощности, каждый из клапанов кольцевания выполнен в виде четырехпинейно- го двухпозиционного гидрораспределителя, установленного с возможностью
5
Ы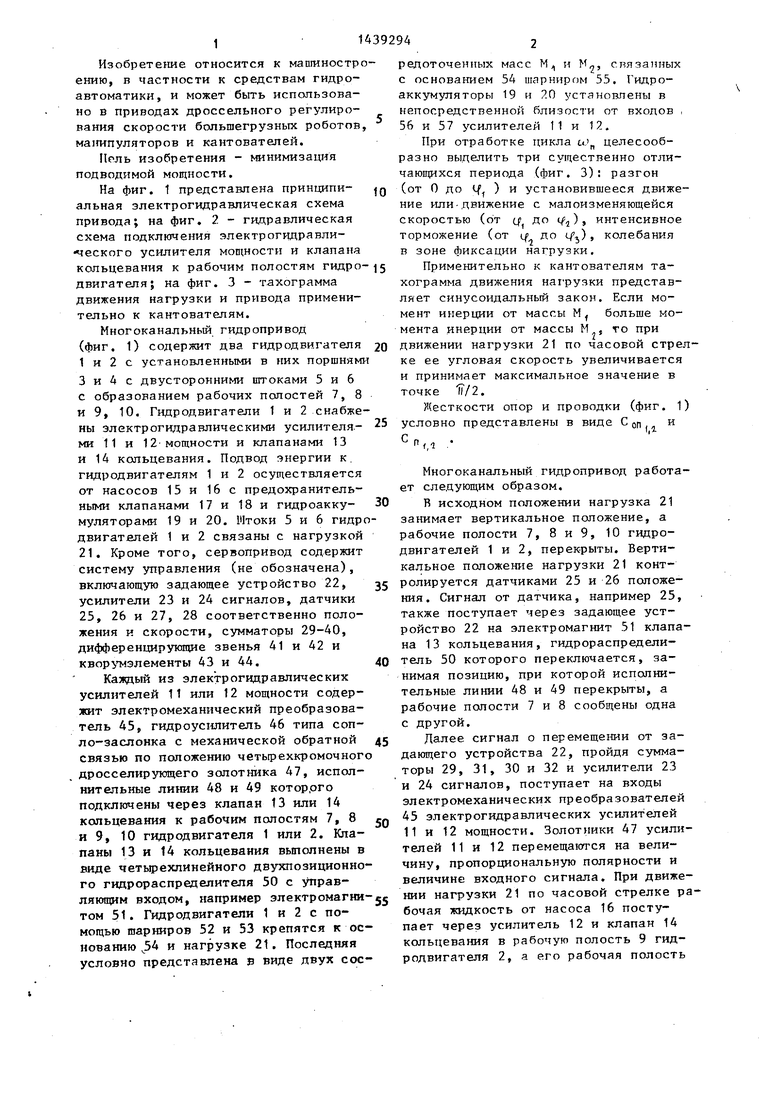

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный гидропривод | 1987 |
|
SU1504377A1 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2007 |
|
RU2337856C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2230944C2 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2007 |
|
RU2347717C1 |
| ДВУХРЕЖИМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ДОПОЛНИТЕЛЬНЫМИ РЕЖИМАМИ КОЛЬЦЕВАНИЯ И ДЕМПФИРОВАНИЯ ВЫХОДНОГО ЗВЕНА | 2011 |
|
RU2483977C2 |
| Многоканальный электрогидравлический следящий привод | 1989 |
|
SU1642099A1 |
| МНОГОКАНАЛЬНЫЙ РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2005 |
|
RU2305800C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С РЕГУЛЯТОРОМ МОЩНОСТИ | 2024 |
|
RU2820916C1 |
Изобретение м.б. использовано в приводах дроссельного регулирования скорости большегрузных роботов, манипуляторов и кантователей. Цель изобретения - ми1в1мизация подводимой мощности. Электрогидравлические уси-- лители мощности (УМ) 11, 12 сообщены исполнительными линиями с рабочими полостями гидродвигателей (ГД) 1, 2 и управляемыми клапанами кальцева1ш.ч 13, 14. Каждьй клапан выполнен в виде четырехлинейного двухпозиционного гидрораспределителя, установленного с возможностью перекрытия исполнительных линий в позиции кольцеватшя рабочих полостей ГД. Управляющие входы гидрораспределителей связаны с датчиками 25, 26 положения системы управления через задающее устр-во 22, а на входе казедого УМ установлен гидроаккумулятор 19, 20. Каждый УМ включает электромеханический преобразователь, гидроусилитель типа сопло-заслонка с механической обратной связью по положению четырехкромоч- ного дросселирующего золотника. На этапе торможения в работе участвуют оба ГД и гидроаккумуляторы. 3 ил. с сл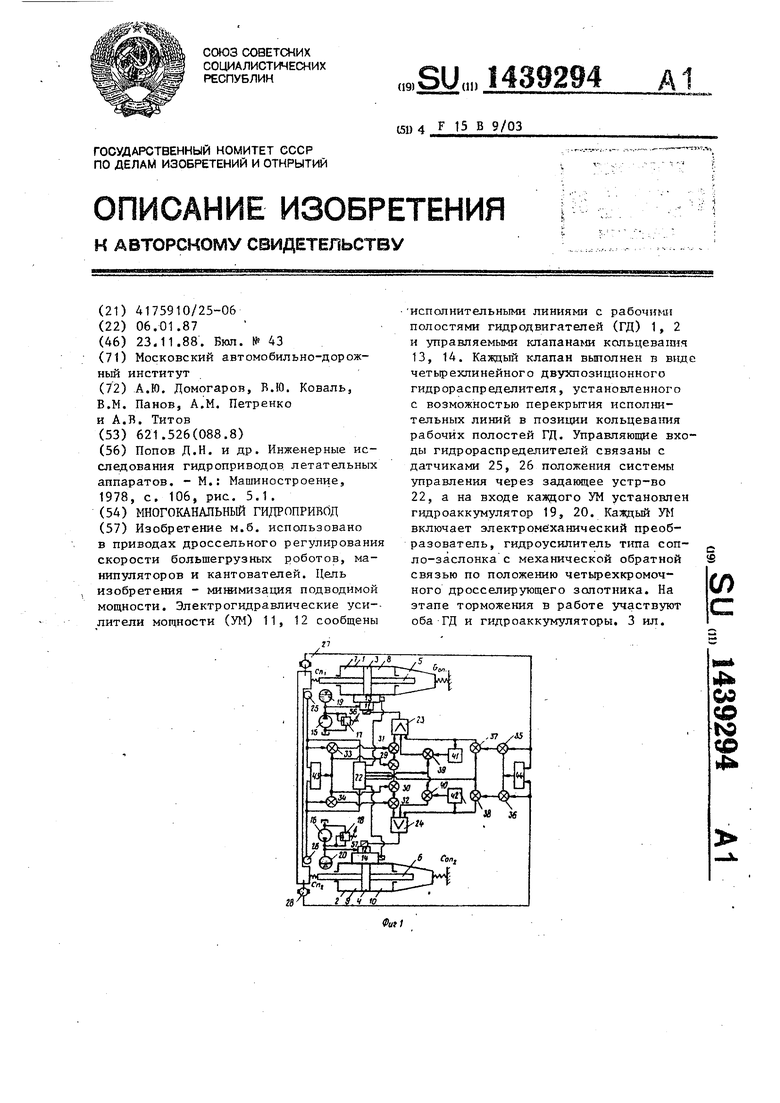
fe.f
lu)°lcl
| Попов Д.Н | |||
| и др | |||
| Инженерные исследования гидроприводов летательных аппаратов | |||
| -М.: Машиностроение, 1978, с | |||
| Светоэлектрический измеритель длин и площадей | 1919 |
|
SU106A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
