. k
4 00
3150
Изобретение относится к машиностроению, в частности к средствам гидроавтоматики, и может быть использовано в приводах дроссельного регулирования скорости большегрузных роботов, манипуляторов и кантователей.
Цель изобретения - уменьшение габаритов и потребляемой мощности при повьпиении надежности и точности уп- равления.
На фиг.1 представлена принципиальная схема сервопривода; на фиг.2 - вариант конструктивного выполнения штоковой полости каждого из гидроцилиндров.
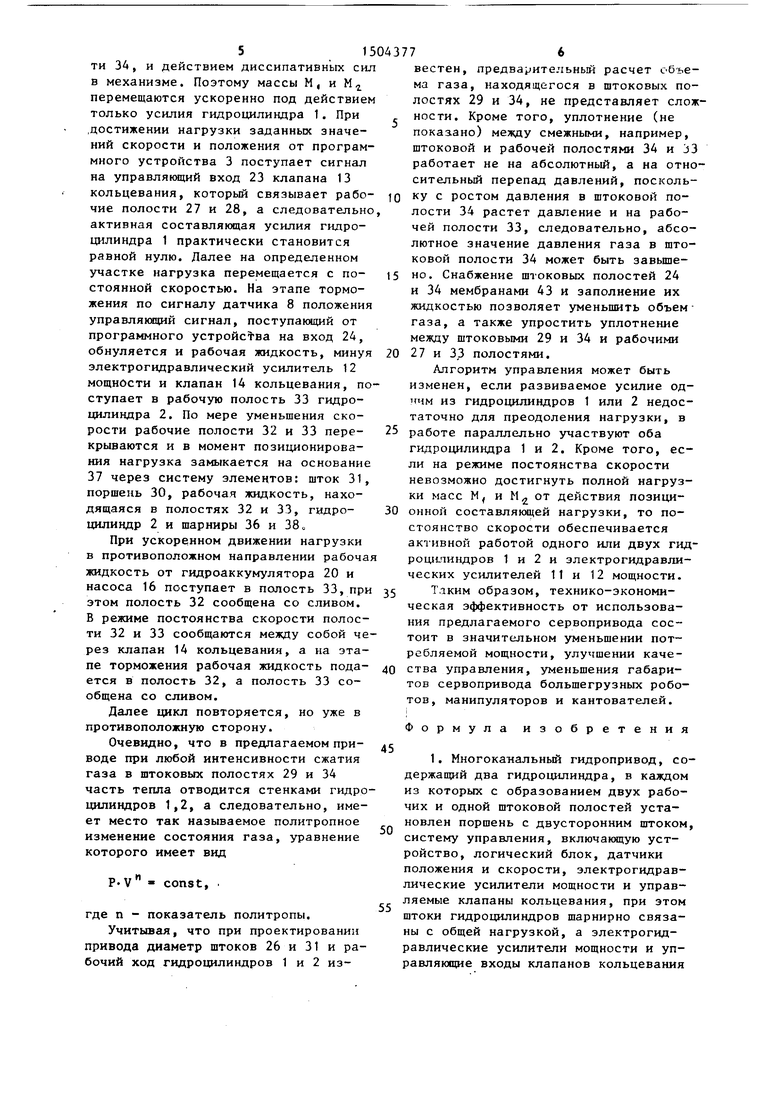
Многоканальный гидропривод (фиг.1) содержит два гидроцилиндра 1 и 2, систему управления, включаюцую про- граммное устройство 3, логический блок 4 с усилителями 5 и 6 сигналов, датчики 7,8 и 9,10 положения и скорости, электрогидравлические усилители 11 и 12 мощности, клапаны 13 и 14 кольцевания, насосную станцию, состоящую из насосов 15 и 16, предохранительных клапанов 17 и 18 и пнев могидравлических аккумуляторов 19 и 20. Управляюпще входы 21,22 и 23,24 электрогидравлнческих усилителей 11 и 12 мощности и клапанов 13 и 14 кольцевания подключены к программному устройству 3 соответственно через логический блок 4 и непосредственно. В гидроцилиндре 1 установлен поршень 25 с двусторонним штоком 26 с образованием рабочих полостей 27 и 28 и штоковой полости 29, а в гидроцилиндре 2 установлен поршень 30 с двусто- ронним штоком 31 с образованием рабочих полостей 32 и 33 и штоковой по слости 34„ Гидроцилиндры 1 и 2 с помощью шарниров 35 и 36 крепятся к основанию 37, а их штоки 26 и 31 ус- тановлены навстречу один к другом и взаимодействуют с общей нагрузкой через шарниры 38. Нагрузка условно представлена в виде двух сосредоточенных масс М, и ,), связанных с основанием 37 посредством двуплечего рычага 39 и шарниров 40. Рабочие полости 27,28 и 32,33 подключены к соответствующим злектрогидрав лическим усилителям 11 и 12 через клапаны 13 и 14 кольцевания, которые могут быть выполнены в виде четырехлинейных гидрораспределителей с возможностью перекрытия исполнительных
линий в позиции кольцевания (на чертеже не раскрыты).
Штоковые полости 29 и 34 предварительно заполняются инертным газом чапример азотом, под давлением через отверстия 41 (см. фиг.2). Кроме того штоковые полости 29 и 34 могут быть заполнены также и рабочей жидкостью чепез отверстия 42, при этом жидкость и газ разделены мембранами 43. После заполнения полостей 29 и 34 жидкостью и газом отверстия 41 и 42 герметично перекрываются. Рабочая жидкость, находящаяся в штоковых полостях 29 и 34, представляет собой гидравлическую пружину.
Многоканальный гидропривод работает следующим образом,
В исходном положении при отсутствии сигнала управления и питания со стороны насосов 15 и 16 рычаг 39 удерживается в вертикальном положении усилиями со стороны штоковых полостей 29 и 34. При включении насосов 15 и 16 рабочая жидкость поступает в гидроаккумуляторы 19 и 20 и далее к электрогидравлическим усилителям 11 и 12 мощности. Для перемещения нагрузки, например, по ча- coBOpI стрелке управляюш 1й сигнал от программного устройства 3 поступает на управляющий вход 24 клапана 14 кольцевания и управляющие входы 21 и 22 электрогидравлических усилителе 11 и 12 мощности. При зтом рабочая жидкость подается в полость 27, полость 28 сообщается со сливом, а по- лэсти 32 и 33 связаны между собой. Под действием перепада давлений в рабочих полостях 27 и 28, воздействующего на поршень 25, шток 26 выводит массы М, и М из положения равновесия. Вместе с рычагом 39 перемещается и шток 31 гидроцилиндра 2, что приводит к повышению давления в штоковой полости 34. Положение и скорость перемещения нагрузки контролируется соответствующими датчиками 7,8 и 9,10, сигналы от которых, минуя логический блок 4, вырабатывают корректирующие сигналы.
При выходе масс М , и М из положения равновесия возникает крутящий момент, направленный в сторону движения штоков 26 и 31. Однако этот момент может быть уравновешен суммарным моментом от усилий, действующих на шток 31 со стороны штоковой полости ЗА, и действием диссипативньгх сил в механизме. Поэтому массы М, и М перемещаются ускоренно под действием только усилия гидроцилиндра 1. При достижении нагрузки заданных значений скорости и положения от программного устройства 3 поступает сигнал на управляющий вход 23 клапана 13 кольцевания, который связывает рабо- чие полости 27 и 28, а следовательно активная составлякицая усилия гидроцилиндра 1 практически становится равной нулю. Далее на определенном участке нагрузка перемещается с по- стоянной скоростью. На этапе торможения по сигналу датчика 8 положения управляющий сигнал, поступающий от программного устройства на вход 24, обнуляется и рабочая жидкость, минуя электрогидравлический усилитель 12 мощности и клапан 14 кольцевания, поступает в рабочую полость 33 гидроцилиндра 2. По мере уменьшения скорости рабочие полости 32 и 33 пере- крываются и в момент позиционирования нагрузка замыкается на основание 37 через систему элементов: шток 31, поршень 30, рабочая жидкость, находящаяся в полостях 32 и 33, гидро- цилиндр 2 и шарниры 36 и 38„
При ускоренном движении нагрузки в противоположном направлении рабоча жидкость от гидроаккумулятора 20 и насоса 16 поступает в полость 33, при этом полость 32 сообщена со сливом. В режиме постоянства скорости полости 32 и 33 сообщаются между собой через клапан 14 кольцевания, а на этапе торможения рабочая жидкость пода- ется в полость 32, а полость 33 сообщена со сливом.
Далее цикл повторяется, но уже в противоположную сторону.
Очевидно, что в предлагаемом при- воде при любой интенсивности сжатия газа в штоковых полостях 29 и 34 часть тепла отводится стенками гидроцилиндров 1,2, а следовательно, имеет место так называемое политропное изменение состояния газа, уравнение которого имеет вид
P.V
const,
где п - показатель политропы.
Учитывая, что при проектировании привода диаметр штоков 26 и 31 и рабочий ход гидроцилиндров 1 и 2 изQs 0 5 0
5 о
д
0
5
вестен, предварительный расчет объема газа, находящегося в штоковых полостях 29 и 34, не представляет сложности. Кроме того, уплотнение (не показано) между смежными, например, штоковой и рабочей полостями 34 и J3 работает не на абсолютный, а на относительный перепад давлений, поскольку с ростом давления в штоковой полости 34 растет давление и на рабочей полости 33, следовательно, абсолютное значение давления газа в што- ковой полости 34 может быть завьщ1е- но. Снабжение штоковых полостей 24 и 34 мембранами 43 и заполнение их жидкостью позволяет уменьшить объем- газа, а также упростить уплотнение между штоковыми 29 и 34 и рабочими 27 и 33 полостями.
Алгоритм управления может быть изменен, если развиваемое усилие одним из гидроцилиндров 1 или 2 недостаточно для преодоления нагрузки, в работе параллельно участвуют оба гидроцилиндра 1 и 2. Кроме того, если на режиме постоянства скорости невозможно достигнуть полной нагрузки масс М и М от действия позиционной составляющей нагрузки, то постоянство скорости обеспечивается активной работой одного или двух гидроцилиндров 1 и 2 и электрогидравлических усилителей 11 и 12 мощности.
Таким образом, технико-экономическая эффективность от использования предлагаемого сервопривода состоит в значительном уменьшении потребляемой мощности, улучшении качества управления, уменьшения габаритов сервопривода большегрузных роботов, манипуляторов и кантователей.
Формула изобретения
1. Многоканальный гидропривод, содержащий два гидроцилиндра, в каждом из которых с образованием двух рабочих и одной штоковой полостей установлен поршень с двусторонним штоком, систему управления, включающую устройство, логический блок, датчики положения и скорости, электрогидравлические усилители мощности и управляемые клапаны кольцевания, при этом штоки гидроцилиндров шарнирно связаны с общей нагрузкой, а электрогидравлические усилители мощности и управляющие входы клапанов кольцевания
подключены к программному устройству, отличающийся тем, что, с целью уменьшения габаритов и потребляемой мощности при повьппении надежности и точности управления, што- ковая полость каждого гидроцилиндра вьтолнена замкнутой и заполнена инертным газом под давлением, а гидроцилиндры расположены симметрично относительно оси качения нагрузки.
2. Гидропривод по п.1, о т л и - чающийся тем, что штоковая полость каждого гидроцилиндра снабжена гидравлической пружиной и мембраной, установленными между штоком и инертным газом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный гидропривод | 1987 |
|
SU1439294A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2212576C2 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1999 |
|
RU2167345C2 |
| Стенд для динамических испытаний гидропривода подач станков с числовым программным управлением | 1984 |
|
SU1190097A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Многоканальный электрогидравлический привод | 1991 |
|
SU1772432A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| Устройство для вытяжки патрубков | 1985 |
|
SU1297961A1 |

Изобретение может быть использовано в приводах дроссельного регулирования скорости большегрузных роботов, манипуляторов и кантователей. Цель изобретения - уменьшение габаритов и потребляемой мощности при повышении надежности и точности управления. В гидроцилиндрах 1, 2 с образованием двух рабочих полостей 27,28 и 32,33 и одной штоковой полости 29,34 установлены поршни 25,30 с двусторонними штоками 26,31. Система управления включает программное устройство 3, логический блок 4 с усилителями 5, 6 сигналов, датчики 7,8 и 9,10 положения и скорости. Штоки 26,31 шарнирно связаны с общей нагрузкой. Электрогидравлические усилители 11, 12 мощности и управляющие входы клапанов 13, 14 кольцевания подключены к программному устройству 3. Штоковые полости 29, 34 выполнены замкнутыми и заполнены инертным газом под давлением. Гидроцилиндры 1,2 расположены симметрично относительно оси качения нагрузки. Полости 29,34 могут быть заполнены рабочей жидкостью через отверстия. Жидкость и газ разделены мембранами. Постоянство скорости обеспечивается активной работой одного или двух гидроцилиндров 1,2 и усилителей 11, 12. 1 з.п.ф-лы, 2 ил.
Фиг. г
Редактор НсКиштулинец
Составитель С.Рождественский
Техред М.ХоданичКорректор Т.Колб
Заказ 5230/35
Тираж 605
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Подписное
| Многоканальный гидропривод | 1987 |
|
SU1439294A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
