Изобретение относится к гидроавтоматике и может быть использовано в системах управления промышленных роботов и манипуляторов.
Цель изобретения - расширение диапазона применения и повышение КПД.
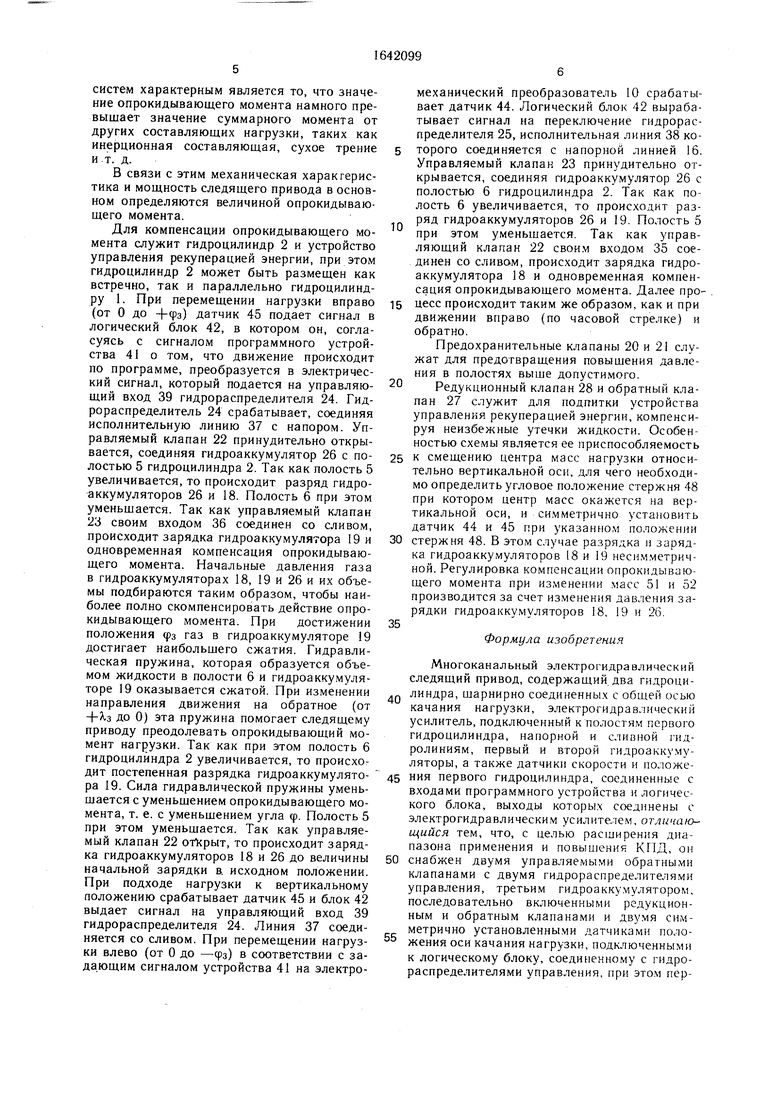
На фиг. 1 изображена схема многоканального электрогидравлического следящего привода; на фиг. 2 - циклограмма перемещения нагрузки.
Привод содержит первый 1 и второй 2 гидроцилиндры, в каждом из которых с образованием рабочих полостей соответственно 3 и 4, 5 и 6 установлены поршни 7 и 8. Полости 3 и 4 гидроцилиндра 1 подключены к электрогидравлическому усилителю 9 мощности, включающему электромеханический преобразователь. )0, гидроусилитель 11 первого каскада усиления мощности (например, типа «сопло-заслонка), гидроусилитель 12 второго каскада усиления мощности (например, дросселирующий золотниковый гидрораспределитель с механической обратной связью). Исполнительные линии 14 и 15 гидроусилителя 9 подключены к рабочим полостям 3 и 4 гидроцилиндра 1. Питание и слив осуществляются по напорной 16 и сливной 17 гидролиниям. Рабочие полости 5 и 6 гидроцилиндра 2 непосредственно соединены с первым 18 и вторым 19 гидроаккумуляторами. Кроме того, гидроцилиндр 2 снабжен устройством управления рекунераци|4 энергии, которое содержит два предохранительных клапана 20 и 21, два управляемых обратных клапана 22 и 23 с гидеерасгаределителями 24 и 25 управлений) третий гидроаккумулятор 26 свободного ход, последовательно соединенные обратный клапан 27 и редукционный клапан 28, вход 29 которого соединен с напорной гидролищгей 16. Выходы 30 и 31 управляемых кдап& Щв 22 и 23 соединены с рабочими полостями 5 и 6 гидроцилиндра 2, входы 32 и 33 - с выходом 34 обратного клапана 27 гидроаккумулятором 26. Управляющие входы 35 и 36 клапанов 22 и 23 связаны с исполнительными гидролиниями 37 и 38 гидрораспределителей 24 и 25, имеющих электрические управляющие входы 39 и 40.
Привод включает программное устройство 41, логический блок 42, датчики 43-
0 45 положения и датчик 46 скорости. Причем программное устройство 41 соединено с электромеханическими преобразователями 10, датчиком 43 положения, датчиком 40 скорости гидроцилиндра 1 и логическим блоком 42,
5 который соединен с датчиками 44 и 45 и управляющими входами 39 и 40 гидрораспределителей 24 и 25. Гидроцилиндры 1 и 2 связаны шарниром 47 с общей осью в виде стержня 48, который шарниром 49 соединен с основанием 50. Датчики 44 и 45 размещены
0 симметрично относительно оси качания нагрузки, т. е стержня 48.
На фиг. 1 график движения нагрузки разбит на три характерных участка по углу ф наклона: движение от 0 до pi (разгон до требуемой скорости); движение от ф|
5 До ф2 (движение с постоянной скоростью); движение от ф2 до фз (торможение до нулевой скорости).
Таким же образом осуществляется движение от ф3 до 0, от 0 до - ф3 и от - фз до 0. Нагрузка изображена в виде двух
0 масс 51 и 52.
Многоканальный привод работает следующим образом.
Гидроцилиндр 1, электрогидравлический усилитель 9, датчик 43 положения, датчик 46
5 скорости и программное устройство 41 составляют единую электрогидравлическую следящую систему. В исходном положении на- гузка удерживается в вертикальном положении. Входной сигнал поступает от программного устройства 41 на вход электро0 механического преобразователя 10, проходит через гидроусилитель сопло-заслонка 11, гидроусилитель 12 и в виде потока жидкости с требуемым расходом и перепадом давлений проходит по исполнительным гидролиниям 14 и 15 к полостям 3 и 4 гидроци5 линдра 1. Опрокидывающий момент, создающийся при наклонах нагрузки, пропорционален углу отклонения нагрузки ф и возрастает с увеличением ф. Для указанных
систем характерным является то, что значение опрокидывающего момента намного превышает значение суммарного момента от других составляющих нагрузки, таких как инерционная составляющая, сухое трение и т. д.
В связи с этим механическая характеристика и мощность следящего привода в основном определяются величиной опрокидывающего момента.
Для компенсации опрокидывающего момента служит гидроцилиндр 2 и устройство управления рекуперацией энергии, при этом гидроцилиндр 2 может быть размещен как встречно, так и параллельно гидроцилиндру 1. При перемещении нагрузки вправо (от 0 до +фз) датчик 45 подает сигнал в логический блок 42, в котором он, согласуясь с сигналом программного устройства 41 о том, что движение происходит по программе, преобразуется в электрический сигнал, который подается на управляющий вход 39 гидрораспределителя 24. Гидрораспределитель 24 срабатывает, соединяя исполнительную линию 37 с напором. Управляемый клапан 22 принудительно открывается, соединяя гидроаккумулятор 26 с полостью 5 гидроцилиндра 2. Так как полость 5 увеличивается, то происходит разряд гидроаккумуляторов 26 и 18. Полость 6 при этом уменьшается. Так как управляемый клапан 23 своим входом 36 соединен со сливом, происходит зарядка гидроаккумулятора 19 и одновременная компенсация опрокидывающего момента. Начальные давления газа в гидроаккумуляторах 18, 19 и 26 и их объемы подбираются таким образом, чтобы наиболее полно скомпенсировать действие опрокидывающего момента. При достижении положения фз газ в гидроаккумуляторе 19 достигает наибольшего сжатия. Гидравлическая пружина, которая образуется объемом жидкости в полости 6 и гидроаккумуляторе 19 оказывается сжатой. При изменении направления движения на обратное (от -f-ta до 0) эта пружина помогает следящему приводу преодолевать опрокидывающий момент нагрузки. Так как при этом полость 6 гидроцилйндра 2 увеличивается, то происходит постепенная разрядка гидроаккумулятора 19. Сила гидравлической пружины уменьшается с уменьшением опрокидывающего момента, т. е. с уменьшением угла ф. Полость 5 при этом уменьшается. Так как управляемый клапан 22 открыт, то происходит зарядка гидроаккумуляторов 18 и 26 до величины начальной зарядки в. исходном положении. При подходе нагрузки к вертикальному положению срабатывает датчик 45 и блок 42 выдает сигнал на управляющий вход 39 гидрораспределителя 24. Линия 37 соединяется со сливом. При перемещении нагрузки влево (от 0 до -фз) в соответствии с задающим сигналом устройства 41 на электро
механический преобразователь 10 срабатывает датчик 44. Логический блок 42 вырабатывает сигнал на переключение гидрораспределителя 25, исполнительная линия 38 которого соединяется с напорной линией 16. Управляемый клапан 23 принудительно открывается, соединяя гидроаккумулятор 26 с полостью 6 гидроцилиндра 2. Так как полость 6 увеличивается, то происходит разряд гидроаккумуляторов 26 и 19. Полость 5 при этом уменьшается. Так как управляющий клапан 22 своим входом 35 соединен со сливом, происходит зарядка гидроаккумулятора 18 и одновременная компенсация опрокидывающего момента. Далее проuecc происходит таким же образом, как и при движении вправо (по часовой стрелке) и обратно.
Предохранительные клапаны 20 и 21 служат для предотвращения повышения давления в полостях выше допустимого.
0 Редукционный клапан 28 и обратный клапан 27 служит для подпитки устройства управления рекуперацией энергии, компенсируя неизбежные утечки жидкости. Особенностью схемы является ее приспособляемость
5 к смещению центра масс нагрузки относительно вертикальной оси, для чего необходимо определить угловое положение стержня 48 при котором центр масс окажется на вертикальной оси, и симметрично установить датчик 44 и 45 при указанном положении
0 стержня 48. В этом случае разрядка и зарядка гидроаккумуляторов 18 и 19 несимметричной. Регулировка компенсации опрокидывающего момента при изменении масс 51 и 52 производится за счет изменения давления зарядки гидроаккумуляторов 18, 19 и 26.
5
Формула изобретения
Многоканальный электрогидравлический следящий привод, содержащий два гидроци0 линдра, шарнирно соединенных с общей осью качания нагрузки, электрогидравлический усилитель, подключенный к полостям первого гидроцилиндра, напорной и сливной гидролиниям, первый и второй гидроаккумуляторы, а также датчики скорости и положе5 ния первого гидроцилиндра, соединенные с входами программного устройства и логического блока, выходы которых соединены с электрогидравлическим усилителем, отличающийся тем, что, с целью расширения диапазона применения и повышения КПД, он
0 снабжен двумя управляемыми обратными клапанами с двумя гидрораспределителями управления, третьим гидроаккумулятором, последовательно включенными редукционным и обратным клапанами и двумя симметрично установленными датчиками поло5 жения оси качания нагрузки, подключенными к логическому блоку, соединенному с гидрораспределителями управления, при этом первыи и второй гидроаккумуляторы непосредственно подключены каждый к одной из полостей второго гидроцилиндра, а третий гидроаккумулятор через управляемые обратные
.клапаны - к обоим полостям второго гидроцилиндра, а через последовательно включенные редукционный и обратный клапаны - к напорной гидролинии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1982 |
|
SU1044783A1 |
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2019 |
|
RU2719295C1 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| Гидравлическая система управления подводным противовыбросовым оборудованием | 1983 |
|
SU1089240A1 |
| Предохранительное устройство для предотвращения опрокидывания стреловой грузоподъемной машины на гусеничном ходу | 1985 |
|
SU1291533A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2212576C2 |
| Наголовник | 1985 |
|
SU1352002A2 |
| Гидропривод мобильной машины | 1988 |
|
SU1643810A1 |
| Автоматизированный гидроимпульсный вертикальный вибропресс | 1991 |
|
SU1784395A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДОРОЖНОЙ МАШИНЫ | 2019 |
|
RU2729534C1 |

Изобретение относится к гидроавтоматике и может быть использовано в системах управления промышленных роботов и манипуляторов. Целью изобретения является расширение диапазона применения и повышение КПД. Входной сигнал поступает от программного устройства 41 на электро
-#
-У/
О Фиг. 2
&г род 1с
Ъ
У,X, ( рад
| Многоканальный гидропривод | 1987 |
|
SU1504377A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
