Г
оо о
Од
ч
кулачке 8, соединенном с приводным двигателем 9, к второму звену 6.прикреплен при помощи держателя 26 сферический съемньй наконечник 27. Звенья 5 и 6 находятся в Контакте с индуктивными линейными датчиками 11 и 12, выходы которых подключены через аналого-цифровой преобразователь 18 к микросчетчику IS, который производит обработку сигналов индуктивных датчиков П и 12, Результаты выводятся на видеоконтрольный блок 23, блок 24 печати или аналоговый линейный графический самописец 25. Траектория движения съемного сферического нако- He tHHKa 27 снимается в двух ортогональных плоскостях в течение пробега наконечника через изменяемую дорожку качения двумя индуктивными линейными датчиками 11 и 12, сигналы которых после преобразования переда отся в микросчетчик 19. ил.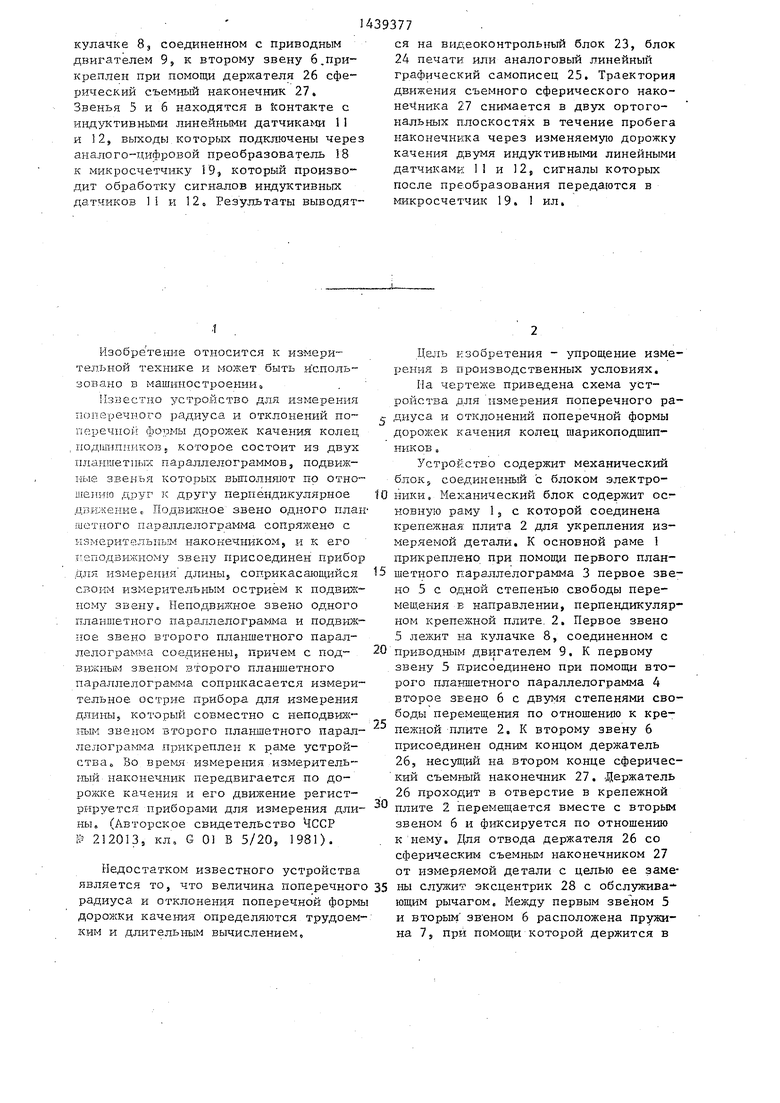
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИУСА И ОТКЛОНЕНИЯ ФОРМЫ НЕЗАМКНУТОЙ ДУГИ ОКРУЖНОСТИ | 1992 |
|
RU2073828C1 |
| Крестовый стол прибора для измерения отклонений формы детали | 1985 |
|
SU1657940A1 |
| ПЕРЕНОСНОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2340926C1 |
| Устройство для дуговой сварки с поперечными колебаниями сварочной горелки | 1983 |
|
SU1133059A1 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО КОНТРОЛЯ ДИАМЕТРОВ ДЕТАЛЕЙ | 1991 |
|
RU2023580C1 |
| Устройство для калибровки датчика перемещения | 1989 |
|
SU1709175A1 |
| Устройство для поэлементного контроля зубчатых колес | 1980 |
|
SU1242705A1 |
| УЧЕБНЫЙ СТЕНД ПО ЭЛЕКТРОНИКЕ | 2016 |
|
RU2636020C1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ОТВЕРСТИЙ БУКС КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2003 |
|
RU2247315C1 |
| СПОСОБ АКТИВНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ В ПРОЦЕССЕ ОБРАБОТКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2557381C2 |
Изобретение ofKOCHTcfl к измерительной технике и может быть использовано в машиностроении. Целью изобретения является упрощение измерений в производственных условиях, которая достигается путем применения конструкции механического блока, обеспечивающей съемку траектории движения измерительного сферического наконечника через измеряемую поверхность в двух Ортогональных плоскостях. Устройство содержит механический блок и блок электроники. Механический блок включает раму 1 с крепежной плитой 2, к которой прикреплены при помощи планшетных параллелограммов 3 и 4 два g звена 5 и 6. Первое звено 5 лежит на
Изобретение относится к измерительной технике и может быть и сноль- зовано в машиностроении ,
Известно устройство для измерения поперечного радиуса и отклонений по- перечной формы дорожек качения колец ггодиа1П1тикоВ{ которое состоит из двух планшетных параллелограммов, подвиж- звенья которых выполняют по отношению друг к. другу перпендикулярное двил-сенкВс Подвилшое звено одного план шетного пггралл ело грамма сопряжено с измерительным наконечником, и к его г еподвижному звену присоединен прибор Для измерения длинЫ; соприкасающийся своим измерительным острием к подвижному звену. Ыеподвиж1-1ое звено одного планшетного параллелограмма и пое звено второго планшетного параллелограмма соединены; причем с под- вижным звеном зторого планшетного параллелограмма сопрпкасается измерительное острие Прибора для измерения длины, который совместно с неподвижным звеном второго планшетного параллелограмма прикреплен к раме устройства. Во время измерения измерительный наконечник передвигается по дорожке качения и его движение регистрируется Приборами для измерения дли- ны, (Авторское свидетельство 4ССР К5 212013., кл, G 01 В 5/20, 1981).
Недостатком известного устройства является то, что величина поперечног радиуса и отклонения поперечной формы дорожки качения определяются трудоемким и длительным вычислением.
л- Ю 5 0
5
5
Цель изобретения - упрощение измерения в производственных условиях.
На чертеже приведена схема устройства для измерения поперечного радиуса и отклонений поперечной формы дорожек качения колец шарикоподшипников
Устройство содержит механический блок, соединенный с блоком электроники. Механический блок содержит основную раму 1э с которой соединена крепежная: плита 2 для укрепления измеряемой детали. К основной раме 1 прикреплено при помощи первого планшетного параллелограмма 3 первое звено 5 с одной степенью свободы перемещения в направлении, перпендикулярном крепежной плите. 2. Первое звено 5 лажит на кулачке 8, соединенном с приводным двигателем 9. К первому звену 5 присоединено при помощи второго планшетного параллелограмма 4 второе звено 6 с двумя степенями свободы перемещения по отношению к крепежной плите 2. К второму звену 6 присоединен одним концом держатель 26, несущий на втором ко.нце сферический съемный наконечник 27. Держатель 26 проходит в отверстие в крепежной плите 2 перемещается вместе с вторым звеном 6 и фиксируется по отношению к нему. Для отвода держателя 26 со сферически - съемным наконечником 27 от измеряемой детали с целью ее заме- lai служит эксцентрик 28 с обслужива ющим рычагом. Между первым звеном 5 и вторым эв еном 6 расположена пружина 7j при помощи которой держится в
соприкосновении с измеряемой поверхностью сферический съёмный наконеч. ник 27. Плоскости движения первого планшетного параллелограмма 3 и второго планшетного параллелограмма 4
.перпендикулярны,
С вторым звеном 6 соприкасается съемное острие второго индуктивного линейного датчика 12, корпус которого соединен с первым звеном 5. С последним соприкасается первый ин- - дуктивный линейный, датчик 11, корпус которого соединен с основной рамой 1,
К основной раме 1 прикреплена направ- 5 ровой-форме передаются для обработки ляющая вьщвижного арретирующего штиф- в микросчетчик 19. Основанием обра-, та 10, причем данная направляющая проходит в отверстие в первом звене 5 и входит в отверстие второго звена
20
ботки является прокладка круговой аркой. Результатом обработки является указание величины поперечного радиуса измеряемой дорожки качения и величины отклонений формы по отношснио к идеальной круговой арке, включая графическую запись формы данных отклонений. Результаты выводятся на видео6, Арретирующий штифт 10 служит для фиксации положения звеньев 5 и 6 по отношению друг к другу и к основной раме 1. Механический блок подключен посредством индуктивных линейных
датчиков 11 и 12 к блоку электроники контрольный блок 23, числовые значе- таким образом, что первый индуктивный ния могут.быть записаны печатающим линейньй датчик 11 подключен к входу блоком 24, а отклонения форм. дорояски первого аналогового электронного бло- качения возможно записать также на ка 13, а второй индуктивный линейный аналоговом линейном графическом самодатчик 12f - к входу второго аналого- 30 писце. вого электронного блока 14, Выходы обоих аналоговых электронных блоков 13 и 14 подключены к входам первого электронного переключателя 15, кото- рьш может быть снабжен восьмью входами для подключения аналоговых электронных блоков, принадлежащих восьми механическим блокам. Первый электронный переключатель 15 подключен к второму электронному переключателю 16, которьй подключен к аналого-цифровому Преобразователю 18 и последний - к микросчетчику 19. К последнему под35
Формула изобретения
Устройство для измерения поперечного радиуса и отклонений поперечной формы дорожек качения колец шарико- . подшипников, содержащее механический блок, соединенный с электронным блоком, образованным двумя аналоговыми Q блоками, подключенным через электронные переключатели к аналого-цифровому преобразователю, выход которого подключен к мнкросчетчику, к которому подключены управляющие линии.
Устройство для измерения попереч ного радиуса и отклонений поперечной формы дорожек качения колец шарико- . подшипников, содержащее механически блок, соединенный с электронным бло ком, образованным двумя аналоговыми Q блоками, подключенным через электро ные переключатели к аналого-цифровому преобразователю, выход которого подключен к мнкросчетчику, к которому подключены управляющие линии.
аналоговый линейный графический само писец, отличающееся тем что, с целью упрощения измерений в производственных условиях, механиключены видеоконтрольныи блок 23,„ -
видеоконтрольныи блок, блок печати,
зшравляющие линии 20, которые соеди- чь : ..
йены с электронными переключателями 15 и 16, аналого-цифровым преобразователем 18 и с третьим электронным
переключателем 17, который соединен „
СП ческии блок содержит раму, соединен
с управляющим блоком приводного дви- 50 .. „
гателя 9, Микросчетчик 19 может быть снабжен цифровым выходом 21 с подключенным печатающим блоком 24 и аналоговым выходом 22 с подключенным аналоговым линейным графическим самопис- 55 ЦВМ 25,
кую с крепежной плитой, к раме прикреплено .при помощи первого планшетного параллелограмма первое звено с одной степенью свободы в направлении, перпендикулярном крепежной плите, первое звено лежит на кулачка, соединенном с приводным двигателем, к первому звену при помощи второго планшетного параллелограмма прикрепПри помощи предлагаемого устройства осуществляется способ измерения
поперечного радиуса и отклонений поперечной формы дорожек качения в соответствии с изобретением ЧССР, охра- авторским свидетельством ЧССР № 21291I. Основанием способа является съемка траектории движения сферического съемного наконечника 27 в течение пробега в поперечном направлении через измеряемую дорожку качения.. Траектория снимается в двух ортогональных координатах индуктивнь -ш линейными датчиками 11 и 12 и соответствующие электрические сигналы в цифровой-форме передаются для обработки в микросчетчик 19. Основанием обра-,
ботки является прокладка круговой аркой. Результатом обработки является указание величины поперечного радиуса измеряемой дорожки качения и величины отклонений формы по отношснио к идеальной круговой арке, включая графическую запись формы данных отклонений. Результаты выводятся на видеоконтрольный блок 23, числовые значе- ния могут.быть записаны печатающим блоком 24, а отклонения форм. дорояски качения возможно записать также на аналоговом линейном графическом самописце.
контрольный блок 23, числовые значе- ния могут.быть записаны печатающим блоком 24, а отклонения форм. дорояски качения возможно записать также на аналоговом линейном графическом самописце.
Формула изобретения
Устройство для измерения поперечного радиуса и отклонений поперечной формы дорожек качения колец шарико- подшипников, содержащее механический блок, соединенный с электронным блоком, образованным двумя аналоговыми блоками, подключенным через электронные переключатели к аналого-цифровому преобразователю, выход которого подключен к мнкросчетчику, к которому подключены управляющие линии.
„ -
аналоговый линейный графический самописец, отличающееся тем, что, с целью упрощения измерений в производственных условиях, механи : ..
„
.. „
кую с крепежной плитой, к раме прикреплено .при помощи первого планшетного параллелограмма первое звено с одной степенью свободы в направлении, перпендикулярном крепежной плите, первое звено лежит на кулачка, соединенном с приводным двигателем, к первому звену при помощи второго планшетного параллелограмма прикреп5 14393776
лено. второе звено с двумя степенямирого соприкасается с первым звеном,
свободы относительно крепежной плиты,на котором укреплен второй индуктивк второму звену прикреплен при помо-ный линейный датчик, съемньш нако- .
щи эксцентрика с рычагом управляв-нечник которого соприкасается с ,втомый держатель со съемным Ьферическимрым звеном, к раме прикреплена на
наконечником, плоскости движенияправляющая вьщвижного арретирующего
планшетных параллелограммов перпен-штифта,
дикулярны, между первым и вторымПризнано изобретением по результа- звеньями расположена пружина, к рамею там экспертизы, осуществленной Ведом- прикреплен первый индуктивный линей-ством по изобретательству Чехословац- ный датчик, съемный наконечник кото-кой Социалистической Республики,