Введение
Предлагаемое изобретение относится к двухстепенному гироскопу с шарикоподшипниками по оси подвеса (оси процессии) или к любому другому узлу с подшипниковым навесом, относительно оси которого действует момент из-за неравножесткости конструкции подвешенного узла.
Предлагаемый способ предназначен для измерения моментов, обусловленных неравножесткостью, и может применяться как в области гироскопической техники, так и в других отраслях приборостроения, где применяются подшипниковые подвесы.
В НИИ ПМ и в фирме Sperry Rand Corporation (см. отчет ASD-TDR-62-80) применяется способ измерения составляющей скорости ухода, обусловленной неравножесткостью гироскопа (скорость ухода затем можно пересчитать на величину момента), который состоит в следующем:
1. Полагают, что момент сил, действующих относительно оси процессии (М), состоит из момента тяжения М1, момента разбалансировки из-за смещения центра тяжести (ц.т.) вдоль оси ротора и перпендиркулярной к ней оси (фиг.1) и из-за момента неравножесткости М4, т.е.

где θ - угол, отсчитываемый от плоскости горизонта до оси ротора.
Скорость ухода  ,
,
где Н - кинетический момент горизонта.
2. Устанавливают гироскоп в положения θ=0° и θ=180° [или θ=90°, θ=270°], измеряют скорость ухода
А(0) и А(180) [или А(90), А(270)]
и рассчитывают скорость ухода из-за момента тяжения М1

и скорость ухода из-за момента разбалансировки вдоль оси ротора М3
3. Устанавливают гироскоп в положения θ=90° и θ=270°, измеряют скорость ухода А(90) и А(270) и рассчитывают скорость ухода из-за момента М2
4. Устанавливают гироскоп в положение θ=45°, измеряют скорость ухода А(45) и рассчитывают скорость ухода из-за неравножесткости Рн/ж по формуле, следующей из (1) и (2)

Из статьи, опубликованной в журнале "Вопросы специальной радиоэлектроники", серия XIX, вып.1, 1965 (Румянцев Г.Г. Точечная оценка составляющих скорости дрейфа гироскопа), известно, что для гироскопов с шарикоподшипниками по оси подвеса представление скорости ухода или момента в виде выражения (1) не правомочно, т.к. при этом не учитывается влияние геометрии беговых дорожек подшипников подвеса.
В более строгой форме скорость ухода должна быть записана так:

Здесь 
d4 ов, d5 - составляющие скорости ухода, обусловленные геометрией деталей подшипников, главным образом овальностью беговых дорожек. В партии приборов это независимые случайные величины с математическим ожиданием, равным нулю. Составляющие d4 ов и d5 изменяются пропорционально первой степени перегрузки;
 - искомое значение скорости ухода из-за неравножесткости, изменяющееся пропорционально квадрату перегрузки;
- искомое значение скорости ухода из-за неравножесткости, изменяющееся пропорционально квадрату перегрузки;
d6, d7 - составляющие скорости ухода, обусловленные геометрией деталей подшипников, главным образом огранкой беговых дорожек. Для партии приборов это независимые случайные величины с нулевым математическим ожиданием.
В первом приближении ряд (4) можно ограничить 2-й гармоникой. Принимая во внимание формулу (4), нетрудно убедиться, что при существующем способе определяется не скорость ухода, обусловленная неравножесткостью d4 н/ж, а сумма величины d4 н/ж со случайными величинами d4 ов и d5, значения которых могут в несколько раз превышать искомую величину d4 н/ж.

Предлагаемый способ первой частью приемов позволяет определить значение момента, пропорционального скорости ухода
а вторая часть приемов направлена на выделение из составляющей этого момента искомой величины момента, обусловленной неравножесткостью гироскопа.
Таким образом, предлагаемый способ лишен недостатка существующего способа.
Описание способа определения моментов относительно оси подвеса двухстепенного гироскопа с шарикоподшипниковым подвесом
Измерение моментов производится либо после установки прибора на центрифугу, либо на вибрирующее основание. Рассмотрим два способа применительно к этим условиям.
На центрифуге при действии линейных перегрузок
1. Устанавливают гироскоп с невращающимся ротором так, чтобы ось подвеса была параллельна оси вращения центрифуги, а ось ротора перпендикулярна направлению действия перегрузок при работе центрифуги. Из этого исходного положения гироскоп будут разворачивать вокруг оси подвеса на угол θ.
2. Разворачивают гироскоп на углы θ=45°, θ=135°, θ=225°, θ=315° и в каждом положении измеряют моменты сил, действующих относительно оси подвеса
М1 (45), М1 (135), М1 (225) и М1 (315) при перегрузке К;
М2 (45), М2 (135), М2 (225) и М2 (315) при перегрузке К и т.д. до Kn. Число n должно быть больше двух. Очередность измерения безразлична.
3. Для каждой перегрузки Kn определяют значение составляющей момента m4 (Kn) по формуле

4. Определяют искомое значение момента из-за неравножесткости  из системы уравнений
из системы уравнений
которая получается по методу наименьших квадратов.
Вибрация основания в направлении вертикали места
1. Устанавливают гироскоп на основание, ось ротора горизонтальна, и разворачивают гироскоп вокруг горизонтальной оси подвеса на углы θ=45°, θ=135°, θ=225° и θ=315°.
2. В каждом положении измеряют моменты сил, действующих относительно оси подвеса:
М1 (45), М1 (135), М1 (225) и М1 (315) при перегрузке К1;
М2 (45), М2 (135), М2 (225) и М2 (315) при перегрузке К2 и т.д. до Kn. Число n должно быть больше двух. Очередность измерения безразлична. Перегрузка должна быть больше единицы.
3. Определение величину момента m4(Kn) по формуле (6).
4. Определяют искомую величину момента из системы (7).
Измерять моменты можно, например, по величине тока в датчике момента оси процессии, необходимого для того, чтобы обратить в нуль сигнал с датчика угла процессии.
Предлагаемый способ отличается новизной и позволяет простыми приемами получить точное значение составляющих скорости ухода или момента из-за неравножесткости гироскопа. По предварительным экспериментальным данным значение момента из-за неравножесткости оценивается с точностью до третьей значащей цифры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТОВ ОТНОСИТЕЛЬНО ОСИ ПОДВЕСА ДВУХСТЕПЕННОГО ГИРОСКОПА | 1980 |
|
SU1840342A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА С ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2570223C1 |
| СПОСОБ КОНТРОЛЯ ГАЗОДИНАМИЧЕСКОЙ ОПОРЫ ГИРОСКОПА | 1985 |
|
SU1840740A1 |
| СПОСОБ БАЛАНСИРОВКИ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2016 |
|
RU2648023C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 1972 |
|
SU344269A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2640967C1 |
| СИЛОВОЕ ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 1971 |
|
SU1839791A1 |
| Способ балансировки динамически настраиваемого гироскопа | 2018 |
|
RU2690039C1 |
Изобретение относится к области гироскопической техники и предназначено для измерения моментов, обусловленных неравножесткостью. Сущность: способ основан на определении суммарных моментов, действующих относительно горизонтальной оси подвеса. При этом устанавливают гироскоп на основание, вибрирующее в направлении вертикали места. Измеряют моменты, действующие относительно оси подвеса при четырех положениях оси ротора, отличных от направления вибрации на угол 45°, при не менее чем двух значениях виброперегрузки, превышающих единицу. Определяют для каждой перегрузки значение суммарного момента. Методом наименьших квадратов вычисляют искомую величину. Технический результат: повышение точности определения. 1 ил.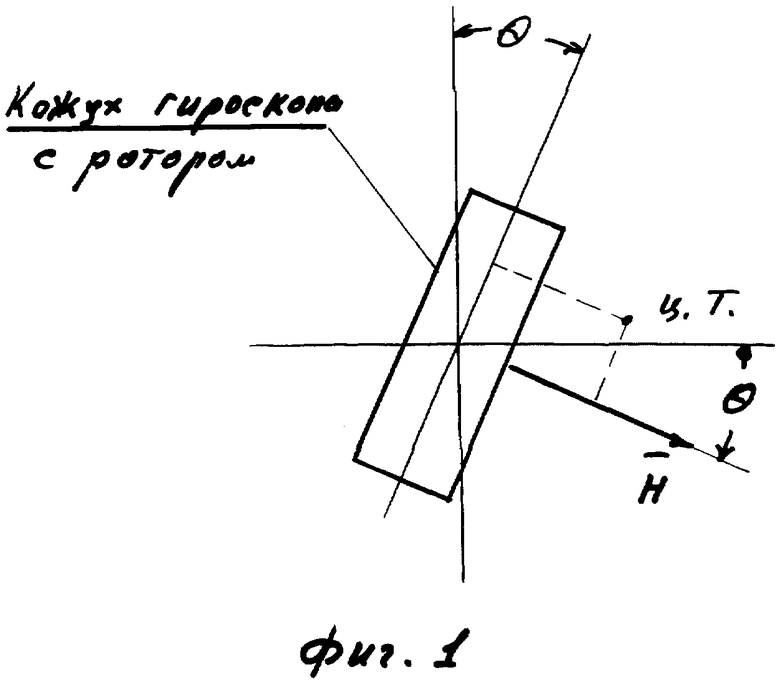
Способ определения моментов относительно оси подвеса двухстепенного гироскопа с шарикоподшипниковым подвесом, вызванных его неравножесткостью, основанный на определении суммарных моментов, действующих относительно горизонтальной оси подвеса, отличающийся тем, что с целью повышения точности определения, устанавливают гироскоп на основание, вибрирующее в направлении вертикали моста, измеряют мосты, действующие относительно оси подвеса при четырех положениях оси ротора, отличных от направления вибрации на угол 45°, при не менее чем двух значениях виброперегрузки, превышающих единицу, определяют для каждой перегрузки значения суммарного момента и методом наименьших квадратов вычисляют искомую величину.

