вают общую механическую энергию путем суммирования энергии, затрачиваемой рачком на спокойные И скачкообразные ЛА, устанавливая энергию по формуле t.n, число п - число ЛА. Устройство для осуществления способа содержит кинокамеру 1, датчик 2 тяго- вьк усилий, связанньй с источником 3 питания и через усипитель 4 с входами светолучевого осциллографа 5, самопи- щущего прибора 6 и двух частотомеров 7 и 8, выходы которых подключены к транскриптору- 5 с печатающим устройством, а также электростимулятор 10
с электродами 11. Датчик 2 тяговых усилий при исследовании рачков длиной более 1 мм содержит балку в виде пластины и четыре тензорезистора, со- . единенных по мостовой схеме. К концу балки крепят стержень для фиксации рачка. При исследовании рачков длиной менее 1 мм используют два последовательно связанных тензорезистора, корпуса которых соединяют с образованием жесткого элемента, а к концу последнего крепят стержень для фиксации рачка. 2 с.п. ф-лы, 2 з.п. ф-лы, 7 ил 1 табл.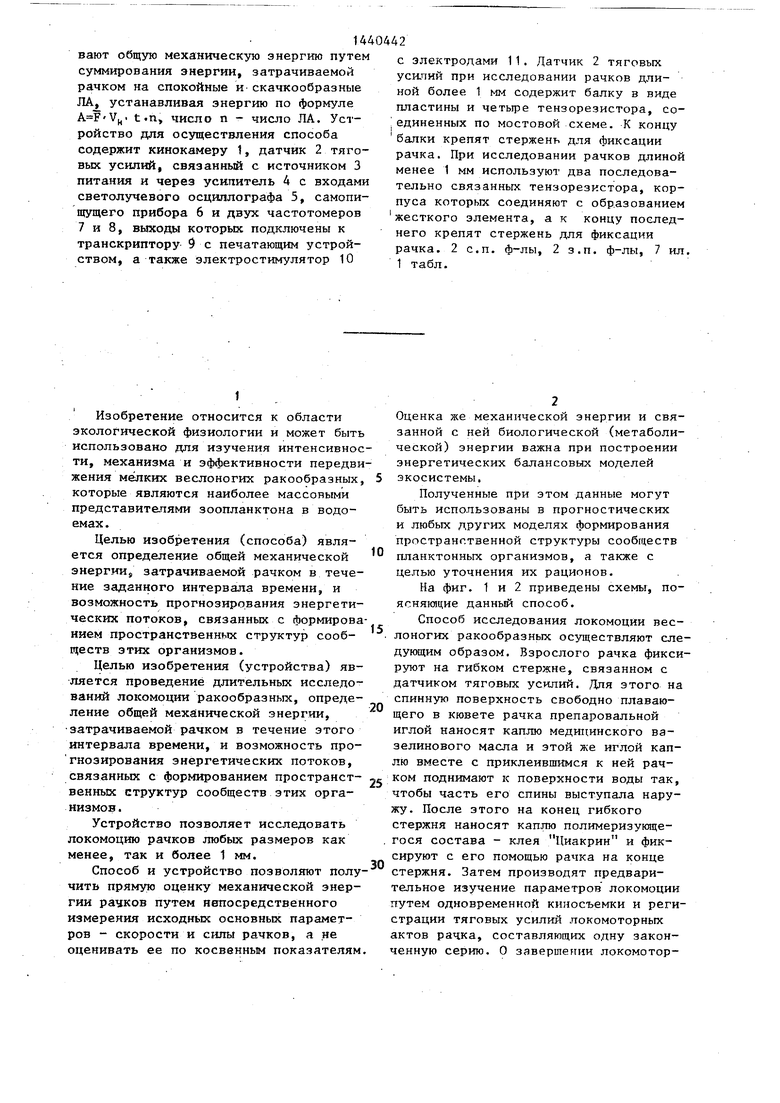
Изобретение относится к экологической физиологии и направлено на определение общей механической энергии, затрачиваемой веслоногим рачком в течение заданного интервала времени, и возможности прогнозирования энергетических потоков, связанных с форми Eh рованием пространственных структур сообществ этих организмов. Для этого при осуществлении способа исследования ЛОКОМОЦИИ веслоногих рачков проводят после крепления рачка на стержне киносъемку и регистрацию развиваемого им тягового усилия при спокойной и скачкообразной локомоцки (после - стимуляции током) и по анализу данных съемки и регистрации определяют длительность (t) одного локомоторного акта (ДА), амплитудное (Рд) и инте- , гральное (F) значения тягового усилия и круговую скорость движения ног рачка (Vj,) для каждого типа локомоции. Находят средние значения указанных параметров и устанавливают связь их : -для каждого типа локомоции, определяю- щуюся следующими зависимостями; F (Рд)-, (Fft); (Fд). Фиксируют нового рачка, осуществляют почасовой подсчет числа его спокойных и скачкообразных ЛА и измеряют среднюю амплитуду тягового усилия. Затем подсчиты(Л О 4 ( to ft.J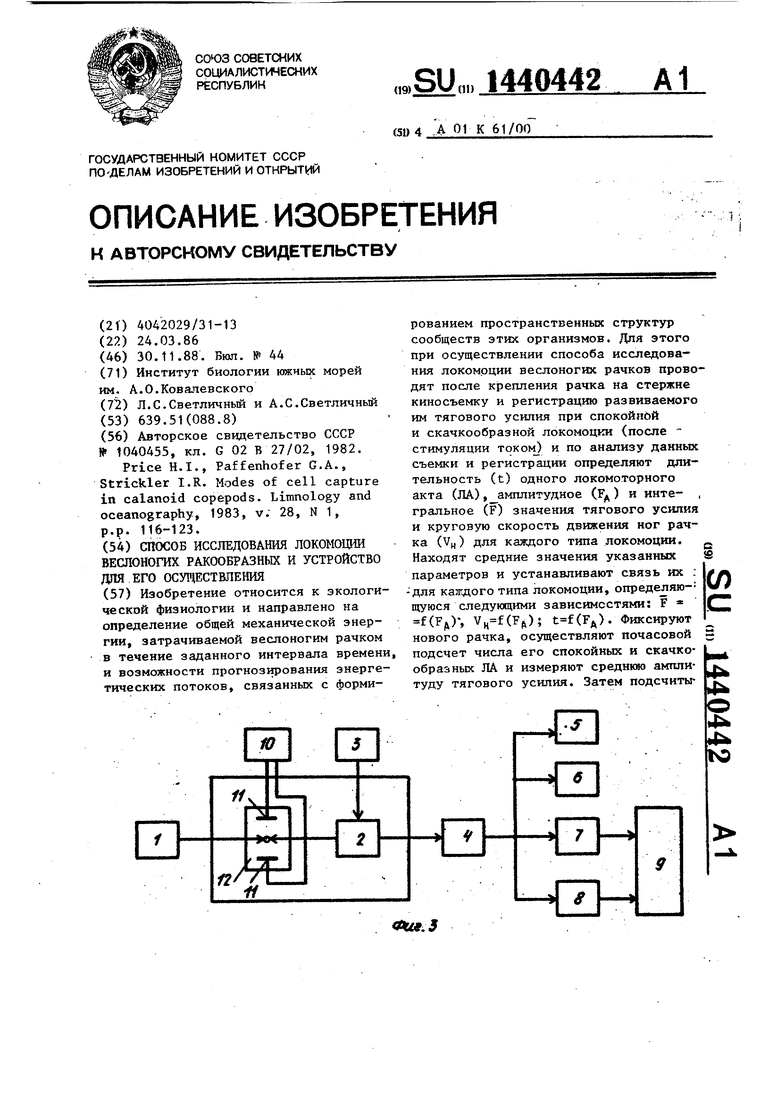
1
Изобретение относится к области экологической физиологии и может быть использовано для изучения интенсивности, механизма и эффективности передвижения мелких веслоногих ракообразных, которые являются наиболее массовыми представите-пями зоопланктона в водоемах.
Целью изобретения (способа) является определение общей механической энергии, затрачиваемой рачком в течение заданного интервала времени, и возможность прогнозирования энергетических потоков, связанньк с формированием пространственньк структур сообществ этих организмов.
Целью изобретения (устройства) является проведение длительных исследований локомоции ракообразных, определение общей механической энергии, затрачиваемой рачком в течение этого интервала времени, и возможность про- гнозирования энергетических потоков, связанных с формированием пространственных структур сообществ этих организмов.
Устройство позволяет исследовать локомоцию рачков любых размеров как менее, так и более 1 мм.
Способ и устройство позволяют получить прямую оценку механической энергии рачков путем непосредственного измерения исходных основных параметров - скорости и силы рачков, а не оценивать ее по косвенным показателям
5
Оценка же механической энергии и связанной с ней биологической (метаболической) энергии важна при построении энергетических балансовых моделей
экосистемы.
Полученные при этом данные могут быть использованы в прогностических и любых других моделях формирования пространственной структуры сообществ
планктонных организмов, а также с целью уточнения их рационов.
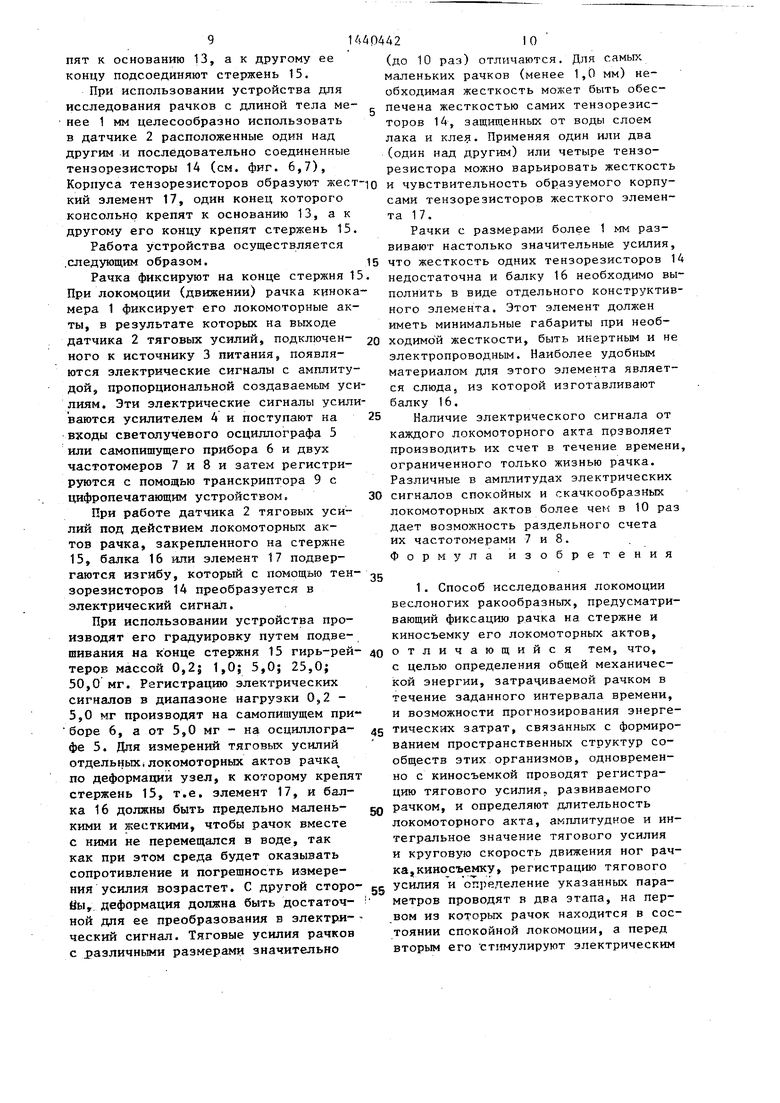
На фиг. 1 и 2 приведены схемы, по- ясняю цие данный способ.
Способ исследования локомоции вес- . лоногих ракообразных осуществляют следующим образом. Взрослого рачка фиксируют на гибком стержне, связанном с датчиком тяговых усилий. Для этого на спинную поверхность свободно плавающего в кювете рачка препаровальной иглой наносят каплю медицинского вазелинового масла и этой же иглой каплю вместе с приклеившимся к ней рачс ком поднимают к поверхности воды так, чтобы часть его спины выступала наружу. После этого на конец гибкого стержня наносят каплю полимеризующе- , гося состава - клея Циакрин и фиксируют с его помощью рачка на конце стержня. Затем производят предварительное изучение параметров локомоции путем одновременной киносъемки и регистрации тяговых усилий локомоторных актов рачка, составляющих одну законченную серию. О завершении локомотор0
0
314404424
ной серии судят по появлению переры- Коэффициенты k,a,b,c и d определя- ва в двигательной активности рачка. „т методом наименьших квадратов по ре- Регистрацию тяговых усилий и кино- зультатам измерений, вьшолненных на съемку проводят в два этапа., на пер- первом и втором этапах исследования вом из которых исследуют самопроиз- для каждого типа локомоции исследуе- вольную активность рачка - спокойные „ой размерной группы рачков и при за- локомоторные акты, а на втором - скач- данной температуре. кообразные локомоторные акты, для че- После этого на стержне фиксируют го на рачка воздействуют импульсом ю другого рачка, осуществляют подсчет тока,подаваемым электростимулятором. gpo спокойных и скачкообразных локоАнализируя на каждом этапе резуль- моторных актов и измерение средней таты измерений тяговых усилий и дви- амплитуды тягового усилия в течение жения конечностей рачка, записанные заданного интервала времени, а общую на кинопленке, устанавливают ампли- is механическую энергию за этот период тудное и интегральное значения тяго- получают путем суммирования энергии, вого усилия, значение круговой ско- затрачиваемой рачком на спокойные и рости движения ног рачка и длитель- скачкообразные локомоторные акты, ко- ность одного локомоторного акта и на- торую устанавливают для каждого типа ходят среднее значение этих парамет- 20 локомоции по формуле .n, где ров для одного спокойного и одного п - число локомоторных актов, скачкообразного локомоторного акта. Замена рачка свежим обусловлена
По результату измерений для каждо- тем, что после электростимуляции по- го типа локомоции устанавливают свя- ведение рачка в длительном экспери- зи между амплитудой (Рд) и результи- 25 менте может быть искажено, рующим интегральным значением (F) тягового усилия, круговой скоростью ног Прием поимки и подъема рачка к по- (Vjj) и длительностью одного локомо- верхности воды перед его фиксацией торного, акта .(t) , определяемые следую- с помощью капли масла позволяет экс- щимй зависимостями: зо периментировать с рачком, практически
- у -fCv Ч 1 травмированным при креплении к
А- стержню датчика, что дает возможность В этих зависимостях f обозначает получать более точные данные, необхо- функцию, представляемую в любом виде определения общей энергии, (показательную или полиноминальную), затрачиваемой рачком на локомоцию. найденную исследователем, по экспери- 35 длительных экспериментов, ментальному матери алу.периодически производя контрольные
В процессе исследования локомодии измерения тяговьк усилий, можно убеж- веслоногих рачков установлено, что I даться в том, что параметры тяговых между их кинематическими параметрами у сохраняют те же значения, что и тяговыми характеристиками существу- , эксперимента или изменяют- ют определенные зависимости. например, значения амплитуДля этого необходимо выполнить , усилий локомоторных актов через серию прямых измерений этих парамет- некоторые интервалы времени в течение ров и найти экспериментально связь эксперимента можно уточнить значения между ними в любом удобном виде. Удоб- энергии одного локомоторного акта, тем нее всего по амплитуде тягового уси- ; повысить точность определения ЛИЯ (Рд) находить все остальные пара- работы рачка за время эксперимента, метры, что и имеет место в данном спо- iНаибольшие изменения происходят при . собе.СП смене условий окружающей среды: освеЭти зависимости могут быть выражены щенности, температуры и др. Устан ов- следукяцнм образом через коэффициенты: лено, что при продолжительности иссле- -dдований до 1 ч достаточно трижды ( рез равномерные промежутки выполнить
Коэффициенты k,a,b,c и d эмпиричес- контрольные измерения. При исследова- кие. Они не являются постоянными вели- ниях длительностью до 24 .ч достаточ- чинами и меняют свои значения при раз- но контролировать амплитуду тяговых личных способах локомоции и у различ- усилий через 1 ч. При многосуточных ных размерных групп.исследованиях достаточно выполнить
контрольные измерения на рассвете, на закате и в середине дня и ночи.
Необходимость и важность определения общей механической энергии при локомоции веслоногих рачков объясняется тем, что эти организмы составляют до 90% организмов планктона, совершают ежесуточные вертикальные миграции в море, поэтому оценка связанной с этим механической или биологической (метаболической) энергии важна как при построении балансовых моделей экосистем., включающих потоки энергии через пик, так и для уточнения величины рациона мигрирующих рачков.
П р им е р. Определяют-общие затраты механической энергии на движение взрослых особей веслоного раЧка Calanus helgolandicus с длиной тела 3,2 мм при 18 С. На спинную поверхность свободно плавающего в кювете планктонного рачка наносят препаровальной иглой каплю медицинского вазелинового масла. Этой же иглой каплю вместе с приклеившимся к ней рачком поднимают к поверхности воды. Соприкоснувшись с поверхностной пленкой
воды, рачок уже не может самостоятель зо торньгх актов, составляющих законченно погрузиться, смоченная вазелином часть его спины выступает из воды, На окончание стеклянного стержня наносят микрок аплю клея Циакрин, ,Взяв в руку основание датчика тяговых усилий, к которому прикреплен стержень, располагают его над экспериментальной кюветой с плавающим по поверхности воды рачком. Выбрав момент, когда ось симметрии рачка совпадает с плоскостью рабочего изгиба балки датчика, касаются стержнем с микрокаплей клея к спинной поверхности рачка и сразу притспляют на глубину 5 мм. В таком положении датчик жестко фиксируют на кювете, располагают в поле зрения кинокамеры, подключают к источнику питания и усилителю.
На первом этапе производят одновременно киносъемку и запись тяговых усилий спокойных локомоторных актов рачка, составляющих законченную серш .(см. фиг.1).
Анализ результатов киносъемки и ре гистрации тяговых усилий показап, что рачок совершает серии спокойных локомоторных актов, в каждом из которых
5
между амплитудой тяговых усилий и ее результирующим интегральным значением, а также круговой скоростью ног и длительностью локомоторного акта существуют зависимости, определяемые формулами: ,4 /Гд; ,5Рд; ,0097F , откуда работа, совершаемая рачком при одном спокойном локомоторном акте , с учетом указанных зависимостей будет определяться формулой ,86Рд,
На втором этапе изучают скачкообразную локомоцию рачка. Для этого подключают к электростимулятору два электрода площадью 10x10 мм и погружают их в кювету так, чтобы промежуток между электродами составил 10- 15 мм, а рачок находился в середине
этого промежутка в центральной области электродов, при этом электроды не препятствовали киносъемке рачка.
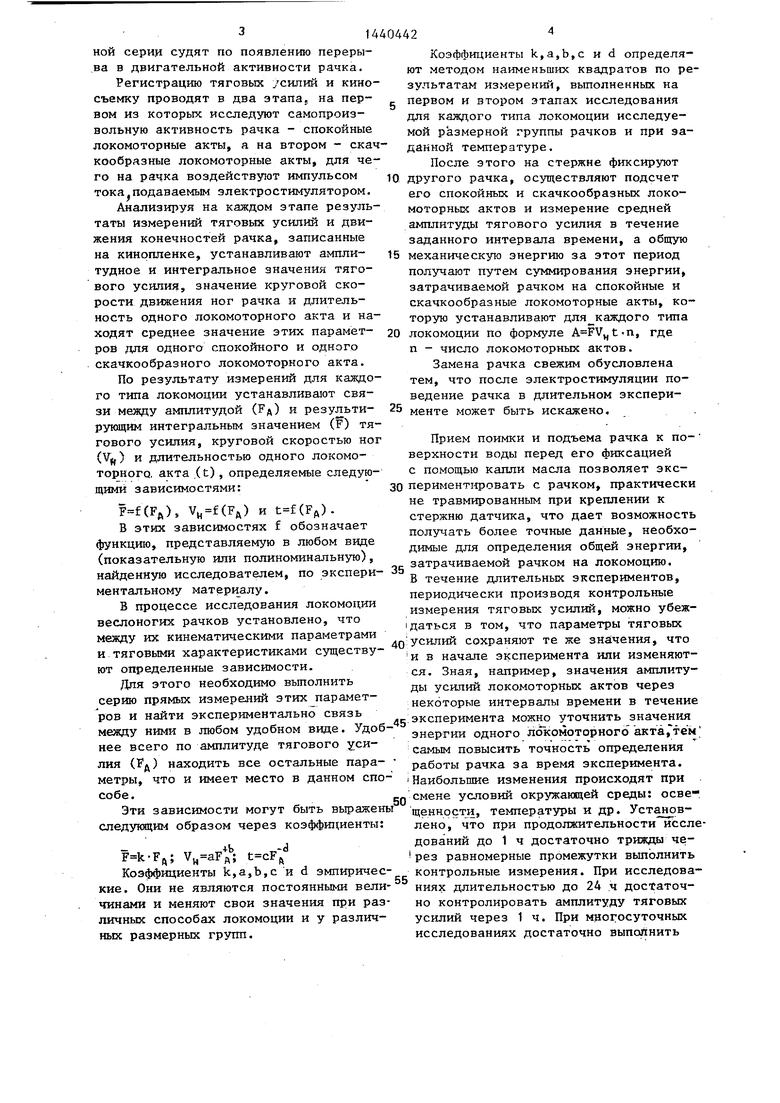
Одновременно с подачей стимулирующего импульса включают кинокамеру и запись тяговых усилий и производят киносъемку со скоростью 3000 кадров в секунду локомодии рачка и регистрацию развиваемых им тяговых усилий в течение нескольких десятков локомоную серию
(см.
фиг, 2).
Анализ результатов киносъемки и регистрации тяговых усилий показал,
5 что рачок совершает серии скачкообразных локомоторных актов, в каждом из которых между амплитудой тяговых усилий и ее интегральным значением, а также круговой скоростью ног и дли0 тельностью локомоторного акта проявляются зависимости, определяемые формулами: ,5Рд; , ; t 0,16Рд , откуда работа, совершаемая рачком при одном скачкообразном
5 локомоторном акте t, с учетом приведенных для этого типа движения формул связи ,Vn,t будет определяться формулой , ,
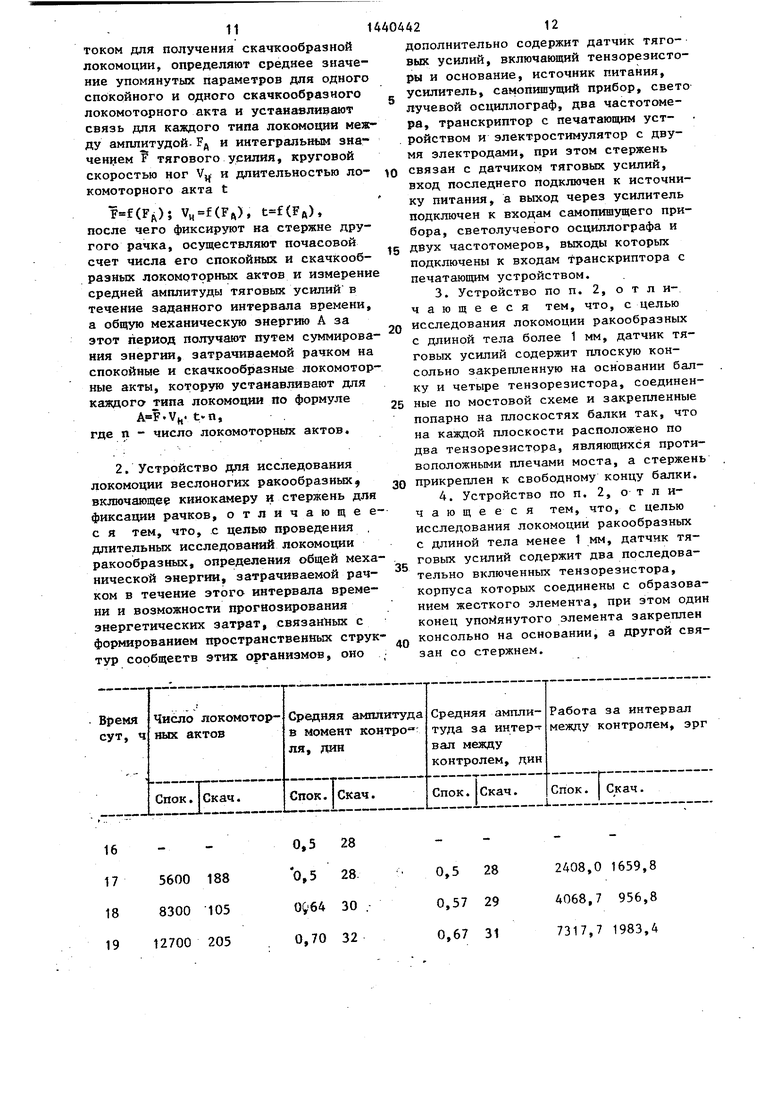
В дальнейшем к датчику прикрепляют такого же, не подвергавшегося действию электрического тока, рачка и в течение 5 ч производят исследование его локомоторной активности. При этом производят счет спокойных и скачкооб разных локомоторных актов и контрольные измерения средней амплитуды тяговых усилий через каждый час. Результаты эксперимента приведены в таблице.
0
5
Анализ таблицы показывает, что за первый час (с 16 до 17 ч) рачок совершает 5600 спокойных и 188 скачкобразных локомоторных актов, средние амплитуды из тяговых усилий соответственно равны 0,5 и 28 дин. Следовательно, за первый час рачок затратил
на спокойную ЛОКОМОЦИЮ Л споу- О
«0, эрг, а на скачкообрая ную Алекам 0,44 (28)° - 188 1659,8 зрг.
Контрольные измерения амплитуды в конце второго часа исследований (в 18 ч) показали, что амплитуда спокойных актов возросла до 0,64, а скачкообразных до 30 дин. Следовательно, средняя амплитуда за этот час равна для спокойных актов
0.,64
-.
0,57 дин, а для скачкообразных
28+30
29 дин.
Таким образом, на втором часу исследований рачок совершает спокойных локомоторных актов (8300) 0,860,57-.,7 эрг, а скачкообразных (105) (29) ,8 эрг.
В течение остальных 3 ч еще трижды контрольными измерениями определяют средние значения амплитуды за время между контрольными операциями и находят совершенную рачками работу Общая работа, совершенная рачком в заданный исследованием интервал времени (5 ч) составила 49954,7 эрг.
Из примера видно, что измеряя только амплитуду тягового усилия и зная ее связь с величиной общей энергии, затрачиваемой рачком на один спокойный и один скачкообразный локомоторный акт, МОЖНО рассчитать затраты общей энергии на локомоторные акты, произведенные за определенный интервал времени, например 1 ч, 2 ч и т.д.
Для осуществления способа используют устройство для исследования локомоции веслоногих ракообразных.
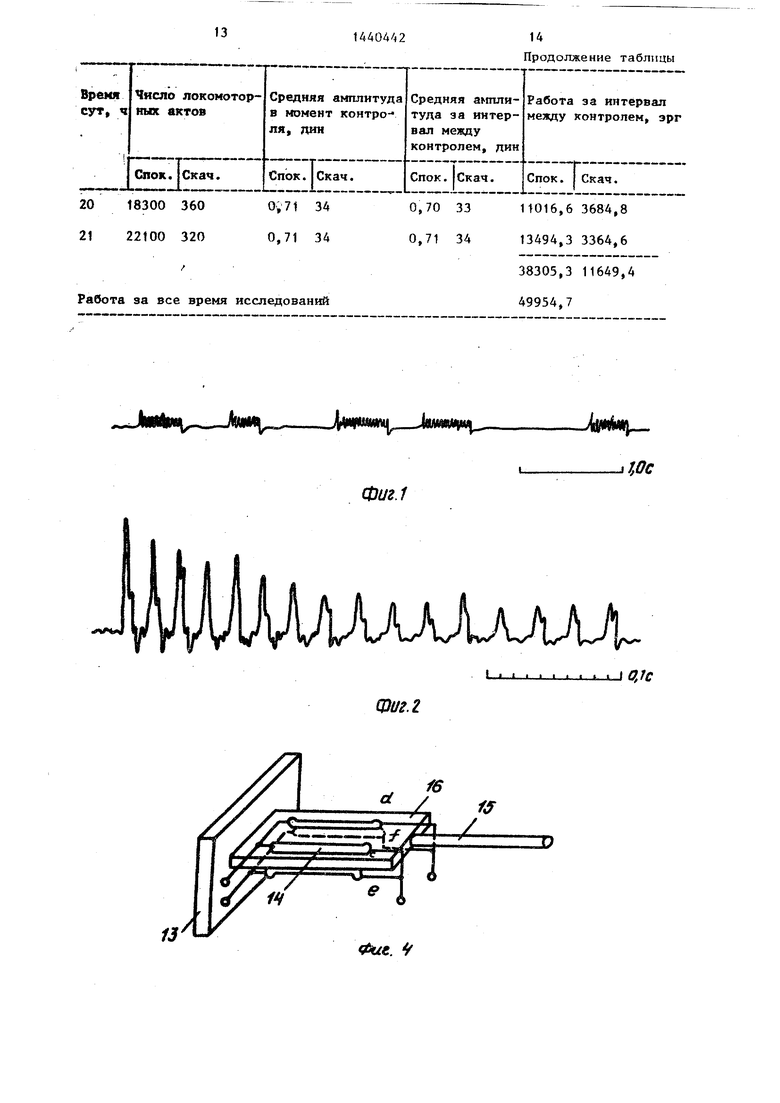
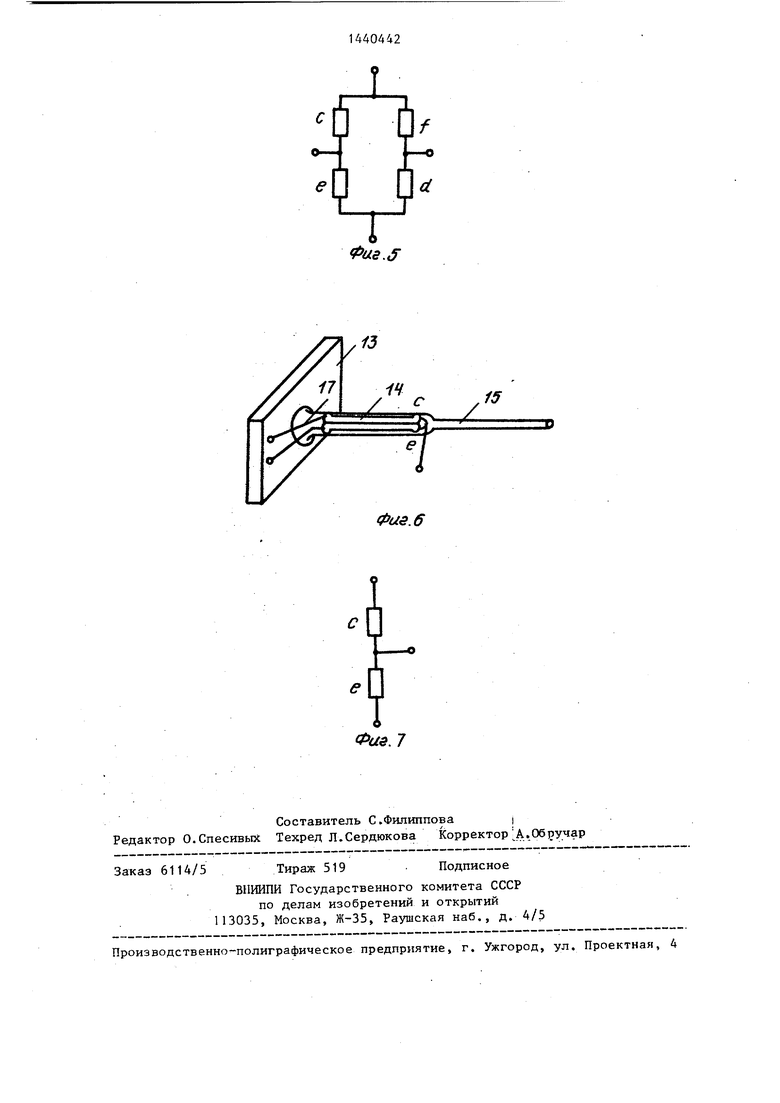
На фиг. 3 изображена блок-схема устройства; на фиг. 4 - общий вид устройства, используемого для исследования ракообразных с длиной тела более 1 мм; на фиг. 5 - схема подключения тензорезисторов датчика этого устройства; на фиг. 6 - общий вид устройства, используемого для исследвания ракообразных с длиной тела менее 1 мм; на фиг. 7 - схема подклю
4404428
чения тензорезисторов датчика этого устройства.
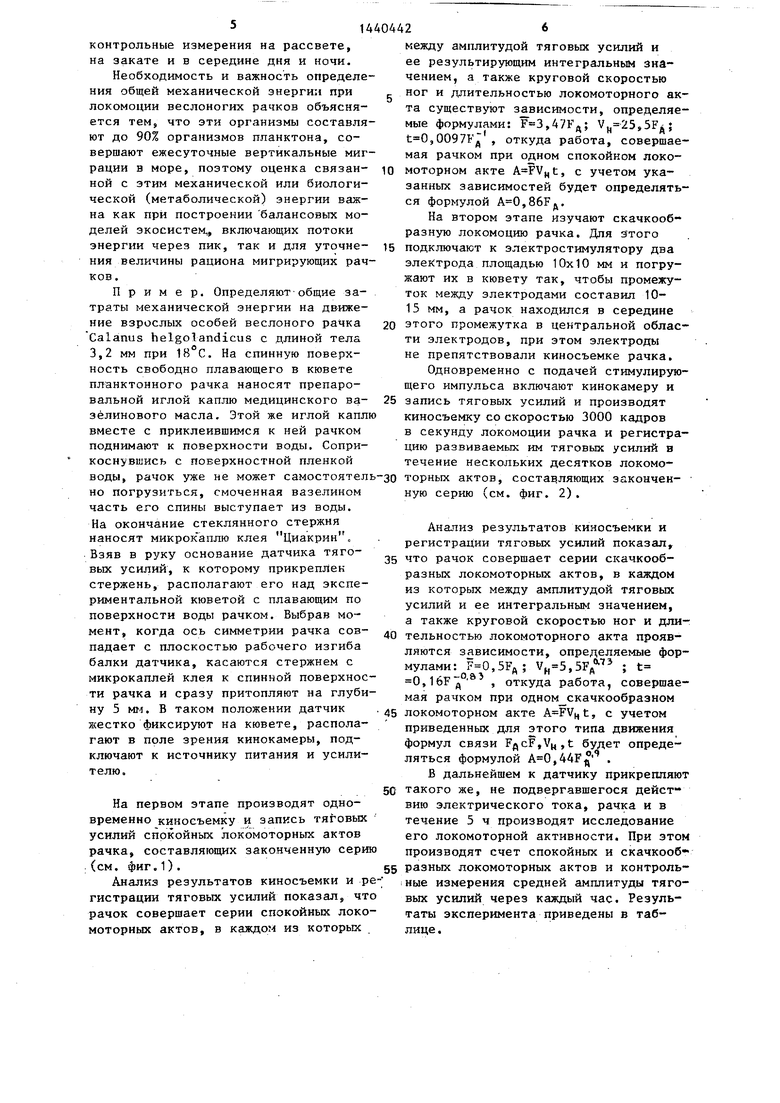
Устройство для исследования локоg моции веслоногих ракообразных состоит (см. фиг.З) из кинокамеры 1, датчика 2 тяговых усилий, источника 3 питания, усилителя 4, светолучевого ос-, циллографа 5, самопишущего прибора 6,
10 двух частотомеров 7 и 8, транскриптора 9 с цифрoneчатающим устройством, а также электростимулятора 10 с электродами 11 и кюветы 12 для исследуемых рачков.
15 Вход датчика 2 тяговых усилий подключен к источнику 3 питания, а выход - через усилитель 4 к входам светолучевого осциллографа 5, самопишущего прибора 6 и частотомеров 7
20 и 8, а выходы последних связаны с входом транскриптора 9 с цифропеча- тающим устройством.
Самопишущий прибор 6 предназначен для регистрации спокойных локомотор25 ных актов, имеющих частоту 30 Гц, а светолучевой осциллограф 5 - для регистрации скачкообразных, имеющих частоту более 200 Гц.
Из двух частотомеров 7 и 8 один
30 осуществляет счет вс.ех локомоторных актов, а другой - только скачкообразных.
Электростимулятор 10 необходим для стимулирования скачкообразных
Зд движений у рачка в начальной стадии исследований, когда исследуют работу (энергию), затрачиваемую рачком за один локомоторный акт. В естественных условиях такие движения рачок со40 вершает редко, поэтому целесообразно принуждать его к этому.
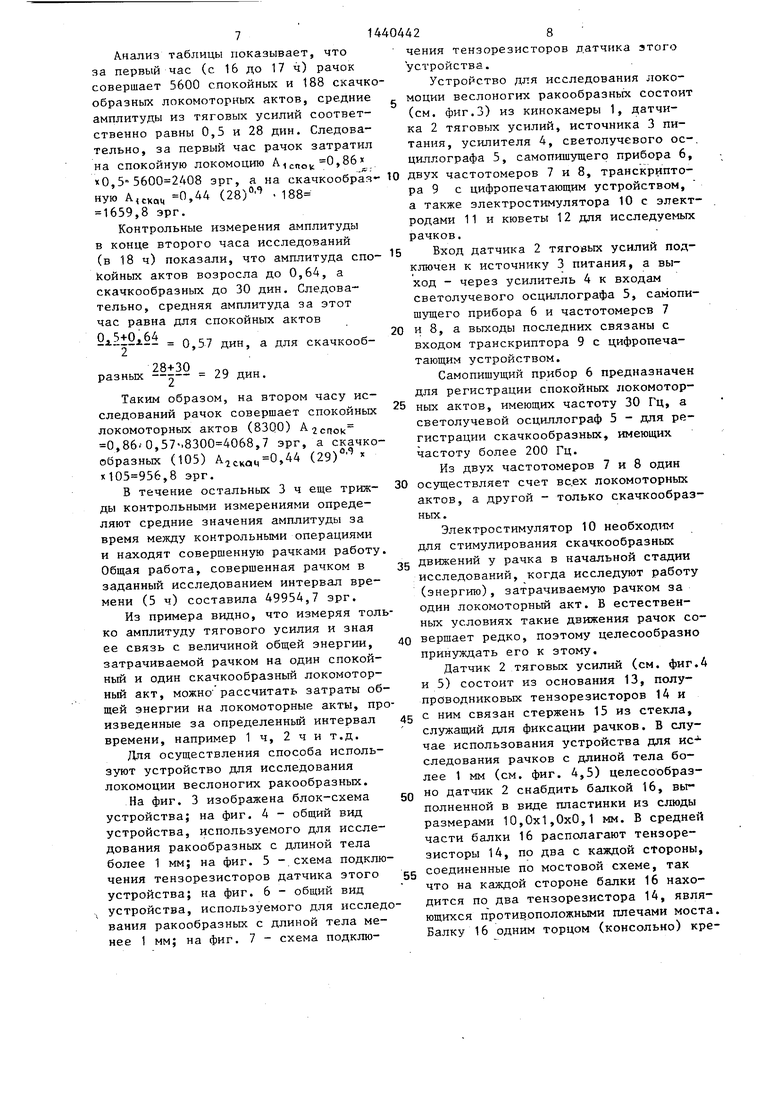
Датчик 2 тяговых усилий (см. фиг.А и 5) состоит из основания 13, полупроводниковых тензорезисторов 14 и
45 с ним связан стержень 15 из стекла, служащий для фиксации рачков. В случае использования устройства для следования рачков с длиной тела более 1 мм (см. фиг. 4,5) целесообраз5Q но датчик 2 снабдить балкой 16, выполненной в виде пластинки из слюды размерами 10,0x1,0x0,1 мм. В средней части балки 16 располагают тензоре- зисторы 14, по два с каждой стороны,
gg соединенные по мостовой схеме, так что на каждой стороне балки 16 находится по два тензорезистора 14, являющихся противоположными плечами моста. Балку 16 одним торцом (консольно) кре9144044210
пят к основанию 13, а к другому ее (до ю раз) отличаются. Для самых концу подсоединяют стержень 15. маленьких рачков (менее 1,0 мм) неПри использовании устройства для обходимая жесткость может быть обес- исследования рачков с длиной тела ме- печена жесткостью самих тензорезис- нее 1 мм целесообразно использовать торов 14, защищенных от воды слоем в датчике 2 расположенные один над лака и клея. Применяя один или два другим и последовательно соединенные (один над другим) или четыре тензо- тензорезисторы 14 (см. фиг. 6,7), резистора можно варьировать жесткость Корпуса тензорезисторов образуют жест- д и чувствительность образуемого корпу- кии элемент 17, один конец которого сами тензорезисторов жесткого элемен- консольнр крепят к основанию 13, а к та 17.
другому его концу крепят стержень 15. Рачки с размерами более 1 мм раз- Работа устройства осуществляется вивают настолько значительные усилия, .следующим образом. что жесткость одних тензорезисторов 14
Рачка фиксируют на конце стержня 15. недостаточна и балку 16 необходимо вы- При локомоции (движении) рачка кинока- полнить в виде отдельного конструктив- мера 1 фиксирует его локомоторные ак- кого элемента. Этот элемент должен ты, в результате которых на выходе иметь минимальные габариты при необ- датчика 2 тяговых усилий, подключен- 20 ходимои жесткости, быть инертным и не кого к источнику 3 питания, появля- электропроводным. Наиболее удобным ются электрические сигналы с амплиту- материалом для этого элемента являет- дой, пропорциональной создаваемым уси- я слюда, из которой изготавливают ЛИЯМ. Эти электрические сигналы усили- балку 16.
ваются усилителем 4 и поступают на 25 Наличие электрического сигнала от входы светолучевого осциллографа 5 каждого локомоторного акта позволяет или самопишущего прибора 6 и двух производить их счет в течение времени, частотомеров 7 и 8 и затем регистри- ограниченного только жизнью рачка. руются с помощью транскриптора 9 с Различные в амплитудах электрических цифропечатающим устройством, 30 сигналов спокойных и скачкообразных
При работе датчика 2 тяговых уси- локомоторных актов более чем в 10 раз ЛИЙ под действием локомоторных ак- дает возможность раздельного счета тов рачка, закрепленного на стержне их частотомерами 7 и 8. 15, балка 16 или элемент 17 подвер- Формула изобретения гаются изгибу, который с помощью тен- g
зорезисторов 14 преобразуется в1. Способ исследования локомоции
электрический сигнал.веслоногих ракообразных, предусматриПри использовании устройства про- вающий фиксацию рачка на стержне и изводят его градуировку путем подве- киносъемку его локомоторных актов, шнвания на конце стержня 15 гирь-рей- адо ичающийся тем, что, теров массой 0,2; 1,0; 5,0; 25,0; с целью определения общей механичес- 50,0 мг. Регистрацию электрических кой энергии, затрачиваемой рачком в сигналов в диапазоне нагрузки 0,2 - течение заданного интервала времени, 5,0 мг производят на самопишущем при- и возможности прогнозирования энерге- боре 6, а от 5,0 мг - на осциллогра- 45 тических затрат, связанных с формиро- фе 5. Для измерений тяговых усилий ванием пространственных структур со- отдельных;локомоторных актов рачка обществ этих организмов, одновремен- по деформации узел, к которому крепят но с киносъемкой проводят регистра- стержень 15, т.е. элемент 17, и бал- цию тягового усилия, развиваемого ка 16 должны быть предельно малень- gQ рачком, и определяют длительность кими и жесткиоми, чтобы рачок вместе локомоторного акта, амплитудное и ин- с ними не перемещался в воде, так тегральное значение тягового усилия как при этом среда будет оказывать и круговую скорость движения ног рач- сопротивление и погрещность измере- ка,киносъемку, регистрацию тягового ния усилия возрастет. С другой сторо се усилия и определение указанных пара- Йы, деформация должна быть достаточ- метров проводят в два этапа, на пер- ной для ее преобразования в электри- вом из которьпс рачок находится в сос- ческий сигнал. Тяговые усилия рачков тоянии спокойной локомоции, а перед с 1)азличными размерами значительно вторым его стимулируют электрическим
11
током для получения скачкообразной локомоции, определяют среднее значение упомянутых параметров для одного спокойного и одного скачкообразного локомоторного акта и устанавливают связь для каждого типа локомоции между амплитудой-Рд и интегральным зна- чен11ем F тягового усилия, круговой скоростью ног Vjj и длительностью локомоторного акта t
(Fft); УЦ(ЕЛ), (Fft). после чего фиксируют на стержне другого рачка, осуществляют почасовой счет числа его спокойных и скачкообразных локомоторных актов и измерение средней амплитуды тяговых усилий в течение заданного интервала времени, а общую механическую энергию А за этот период получают путем суммирования энергии, затрачиваемой рачком на спокойные и скачкообразные локомоторные акты, которую устанавливают для каждого типа локомоции по формуле
AeF V. t. п, где п - число локомоторных актов.
2, Устройство для исследования локомоции веслоногих ракообразных включающее кинокамеру и стержень для фиксации рачков, отличающе е- с я тем, что, с целью проведения , длительных исследований локомоции ракообразных, определения общей механической энергии, затрачиваемой рачком в течение этого интервала времени и возможности прогнозирования энергетических затрат, связанных с формированием пространственных структур сообществ этих организмов, оно
5600 188
8300 105
12700 205
0,528
о 528
0 6430
0,7032
12
дополнительно содержит датчик тяговых усилий, включакнций тензорезисто- ры и основание, источник питания, усилитель, самопишущий прибор, свето лучевой осциллограф, два частотомера, транскриптор с печатающим устройством и электростимулятор с двумя электродами, при этом стержень связан с датчиком тяговых усилий, вход последнего подключен к источнику питания, а выход через усилитель подключен к входам самопишущего прибора, светолучевого осциллографа и двух частотомеров, выходы которых подключены к входам транскриптора с печатающим устройством.
прикреплен к свободному концу балки.
28 29 31
2408,0 1659,8 4068,7 956,8 7317,7 1983,4
Время сут ч
Число локомотор- тлс актов
Спок.(скач.
2018300 360
2122100 320
0,71 34 0,71 34
Работа за все время исследований
AtMilMmtll JttlWtttfllM
V4
fj
/
33 34
И016,6 3684,8 13494,3 3364,6 38305,3 11649,4 49954,7
MlAl&lM
|УЦ|РУР1||,
Фиг.1
Фиг.2
Фие.
Т
.J
Физ.б
Фаз. 7
| Устройство для исследования подвижности животных | 1982 |
|
SU1040455A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Price H.I., Paffenhofer G.A., Strickler I.R | |||
| Modes of cell capture in calanoid copepods | |||
| Limnology and oceanography, 1983, v | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Способ получения бензидиновых оснований | 1921 |
|
SU116A1 |
