liU
Изобретение относится к угольному машиностроению, в частности к средствам управления механизированными крепями,
Цель изобретения - повышение надежности.
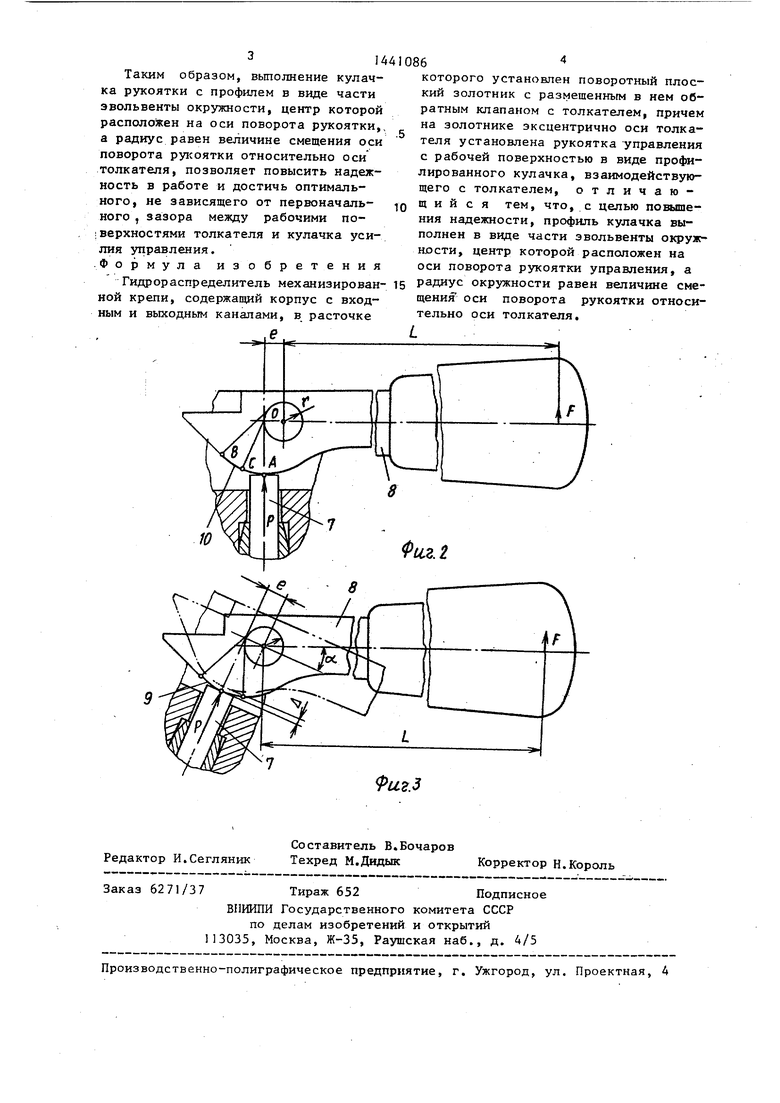
На фиг, 1 изображен гидррр.аспреде- литель, общий вид; на фиг.2 - схема действующих на рукоятку сип в момент открытия клапана; на фиг.З - то же, при открытом клапане.
Гидрораспределитель содержит корпус 1 с входйьш каналом 2 и выходным каналом 3, в расточке, 4 которого устсшовлен поворотный плоский золотник 5 с размещенными в нем обратным клапаном 6, на золотнике 5 эксцентрично оси толкателя 7 установлена рукоятка управления 8 с рабочей поверхкостью в виде кулачка 9 с профипем в виде части эвольвенты окружности, центр которой расположен на оси поворота рукоятки 8, а радиус окружности равен величине смещения оси пово рота рукоятки относительно оси толкателя 7,
Гидрораспределитель работает следующим образом.
Б исходном положении, когда клапан 6 закрыт, рукоятка 8 находится в горизонтальном положении. При этом, мезсду рабочими поверхностями кулачка
5и толкателя 7 имеется первоначальный зазор, который в зависимости от точности изготовления деталей гидрораспределителя может изменяться от минимального (нулевого) до максимального А (фиг.-3). Для открытия клапана
6к рукоятке управления 8 необходимо приложить усилие F. При нулевом первоначальном зазоре (фиг.2) кулачок 9 вступает в контакт с толкателем 7, когда рукоятка 8 находится в исходно (горизонтальном) положе1ши. При максимальном первоначальном.зазоре (фиг.З) кулачок 9 вступает в контакт
с толкателем 7, когда рукоятка 8 повернута на угол / , В том и другом случае дальнейший поворот рукоятки управления 8 приводит к перемещению толкателя 7, который открывает клапан 6, в результате чего жидкость поступает из входного канала 2 в выходной канал 3. После снятия усилия управления клапан 6 закрывается, рукоятка 8 автомаг чески возвращается в исходное положение.
,
5
0
5
Профиль рабочей поверхности кулачка 10 выполнен в виде части АВ эвольвенты окружности, центр которой расположен на оси поворота рукоятки управления 8 а радиус г равен величине смещения оси поворота рукоятки 8 относительно оси толкателя 7 (фиг.2, 3).
В момент касания эвольвентного профиля кулачка 9 плоской поверхности толкателя 7 нормаль к эвольвенте, а следовательно, и к плоской поверхности толкателя 7 в точке касания, как это вытекает из свойства эвольвенты, является касательной к ее эволюте, т.е. к окружности радиуса. Поскольку плоская поверхность толкателя 7 перпендикулярна к его оси, а радиус эволюты г равен величине смещения оси поворота рукоятки 8 относительно оси толкателя 7,то нормаль к точке касания эвольвентного профиля плоской поверхности толкателя 7 при любом первоначальном зазоре между рабочими поверхностями кулачка 9 и толкателя 7 совпадает с осью толкателя 7. Поэтому сила Р, действующая со стороны толкателя 7 на рукоятку 8 и проходящая через ось толкателя 7, всегда приложена к одной и той же точке на поверхности толкателя 7 - точке пересечения оси толкателя.7с его плоской рабочей поверхностью,
В то же время в зависимости от первоначального зазора между кулачками 9 и толкателем 7 в момент касания их рабочих поверхностей в контакт вступают различные точки эвольвентного профиля кулачка 9. Так,при нулевом зазоре в контакт вступает точка А эвольвентного профиля (фиг.2) при максимальном зазоре j точка с (фиг.З), а при любом другом зазоре - промежуточные точки. Во всех этих случаях, а также при движении толкателя 7 в направляющей на него не действует (если пренебречь силами.трения между контактирующими поверхностями кулачка 9 и толкателя 7 перекашивающее усилие, что уменьшает износ толкателя 7, его направляющей, резинового уплотнения и повышает надежность работы гидрораспределителя.
Усилие управления F не зависит от величины первоначального зазора, так как сила Р смещена относительно оси поворота всегда на одну и ту же величину е 2.
Гидрораспределитель механизирован- 15 окружности равен величине сменой крепи, содержащий корпус с вход-щения оси поворота рукоятки относи- ным и вькодным каналами, в расточкетельно оси толкателя.
еL
и.3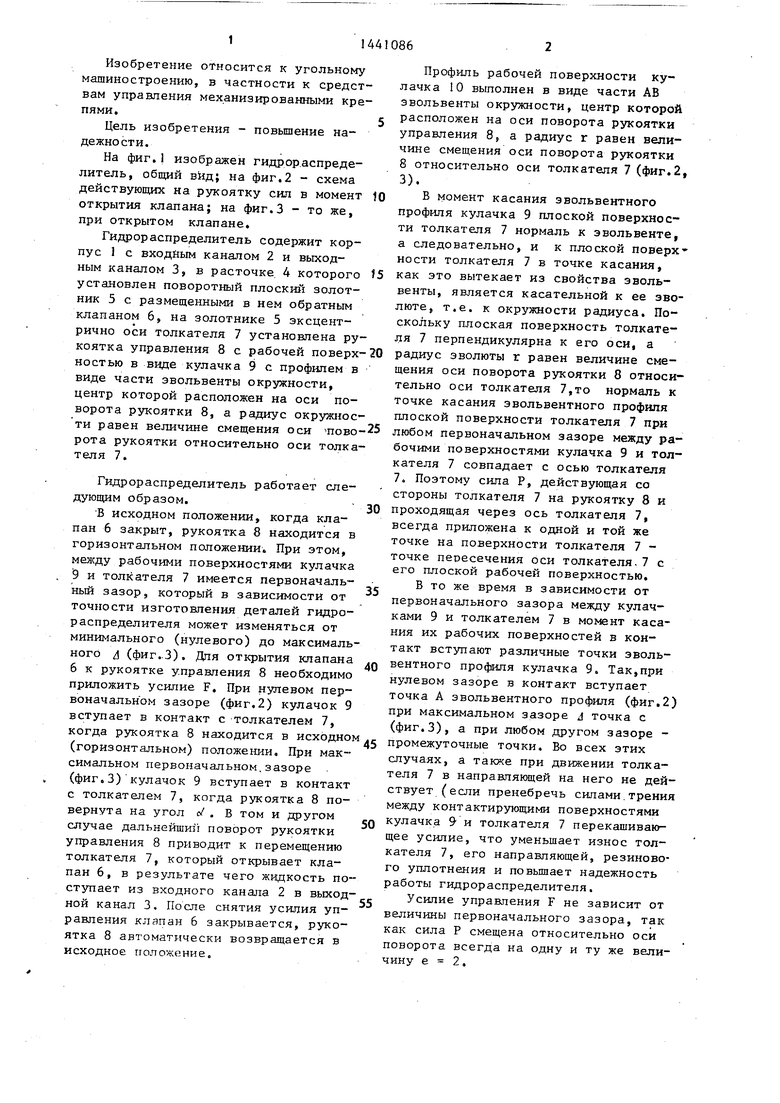
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД И СПОСОБ РЕГУЛИРОВКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2000 |
|
RU2174626C1 |
| РОТОР, ВКЛЮЧАЮЩИЙ ПОВЕРХНОСТЬ С ЭВОЛЬВЕНТНЫМ ПРОФИЛЕМ | 2012 |
|
RU2619153C2 |
| КУЛАЧКОВЫЙ МЕХАНИЗМ | 2010 |
|
RU2427745C1 |
| СПОСОБ РЕГУЛИРОВКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2002 |
|
RU2216653C2 |
| Спирально-шлифовальный станок | 1985 |
|
SU1288028A1 |
| Устройство реверсивного поворота и фиксации | 1991 |
|
SU1816618A1 |
| Радиоэлектронный блок | 1988 |
|
SU1517150A1 |
| Зубчатый редуктор | 1988 |
|
SU1551891A1 |
| ЗУБЧАТАЯ ПАРА | 1944 |
|
SU67425A1 |
| ПРИВОДНАЯ СИСТЕМА С ПОЛНЫМ КОНТАКТОМ ПОВЕРХНОСТЕЙ | 2017 |
|
RU2742434C2 |
Изобретение относится к угольному машиностроению. Цель изобретения f- повышение надежности распределителя. В расточке 4 корпуса 1 установлен по3 воротный плоский золотник 5 с размещенным в нем обратным клапаном 6 с толкателем (Т) 7..На золотнике эксцентрично оси Т 7 установлена рукоятка управления (РУ) 8 с рабочей поверхностью в виде профилированного кулачка 9, взаимодействующего с Т. Профиль кулачка выполнен в виде части эвольвенты окружности, центр к-рой расположен на оси поворота РУ 8, а радиус окружности равен величине смещения оси поворота РУ относит, оси Т. За счет этого сила, действующая со стороны Т на РУ и проходящ.ая через ось Т, всегда припожена к .точке пересечения оси Т с его плоской рабо- чей поверхностью, что исключает действие перекашивающего усилия. Это уменьшает износ Т, его направляющей и резинового уплотнения. 3 ил. (Л
| Устройство для учета рыб | 1980 |
|
SU959716A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Водоотводчик | 1925 |
|
SU1962A1 |
