Изобретение относится к машиностроению, в частности к механизмам преобразования возвратно-поступательного движения во вращательное (и наоборот) и может быть использовано, например, в устройствах, интегрирующих ускорение.
Известен «Трехзвенный кулачковый механизм с качающимся пазовым кулачком» (Механизмы в современной технике. И.И.Артоболевский, - М.: «НАУКА», 1981, T.V, №2842, 34 с.), содержащий кулачок с профилированным пазом, толкатель с роликом и направляющие. Недостатком данного устройства являются большие массогабаритные характеристики, а также то обстоятельство, что для любого относительного положения толкателя и кулачка невозможно получить максимальный и не зависящий от взаимного перемещения толкателя и кулачка крутящий момент на оси кулачка. Это связано с тем, что при движении толкателя по поверхности кулачка меняется угол между направлением действующей силы и нормалью к профилю в точке касания толкателя и соответственно момент. Указанное устройство выбрано в качестве прототипа.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании кулачкового механизма с максимально возможным и не зависящим от взаимного перемещения кулачка и толкателя крутящим моментом на оси кулачка.
Технический результат, достигаемый при использовании изобретения, состоит в обеспечении максимально возможного и не зависящего от угла поворота кулачка момента на его оси; увеличении КПД и уменьшении массогабаритных характеристик за счет организации взаимного перемещения кулачка и толкателя без трения.
Это достигается тем, что в кулачковом механизме, содержащем кулачок с профилированным пазом, толкатель и его направляющие, новым является то, что толкатель выполнен в виде сферического тела, установленного в профилированном пазу кулачка и между направляющими с возможностью качения вдоль них, а профилированная поверхность кулачка образована двумя эквидистантными поверхностями, каждая из которых сформирована образующей кривой, являющейся эвольвентой окружности с центром на оси вращения кулачка и радиусом, равным расстоянию между осью вращения кулачка и прямолинейной траекторией перемещения геометрического центра сферического тела, при этом расстояние между указанными поверхностями выбрано не менее диаметра сферического тела.
В заявляемом устройстве преобразование поступательного перемещения сферического тела в качестве толкателя во вращательное кулачка происходит при качении сферического тела по направляющей и по одной из профилированных поверхностей кулачка, при этом за счет исключения сил трения скольжения достигнуто увеличение КПД механизма. Профилированный паз кулачка, образованный двумя поверхностями с помощью эвольвенты с заданными параметрами и ее эквидистанты, при воздействии на кулачок сферического тела обеспечивает максимально возможный и не зависящий от угла поворота кулачка момент на его оси. Это достигается тем, что при любом угле поворота кулачка направление силы воздействия сферического тела и нормаль в точке касания сферического тела и профиля совпадают (сила нормального давления совпадает с силой инерции сферического тела). Кроме того, функции толкателя и ролика (как в прототипе) выполняет сферическое тело, благодаря чему достигается уменьшение массы и габаритов механизма.
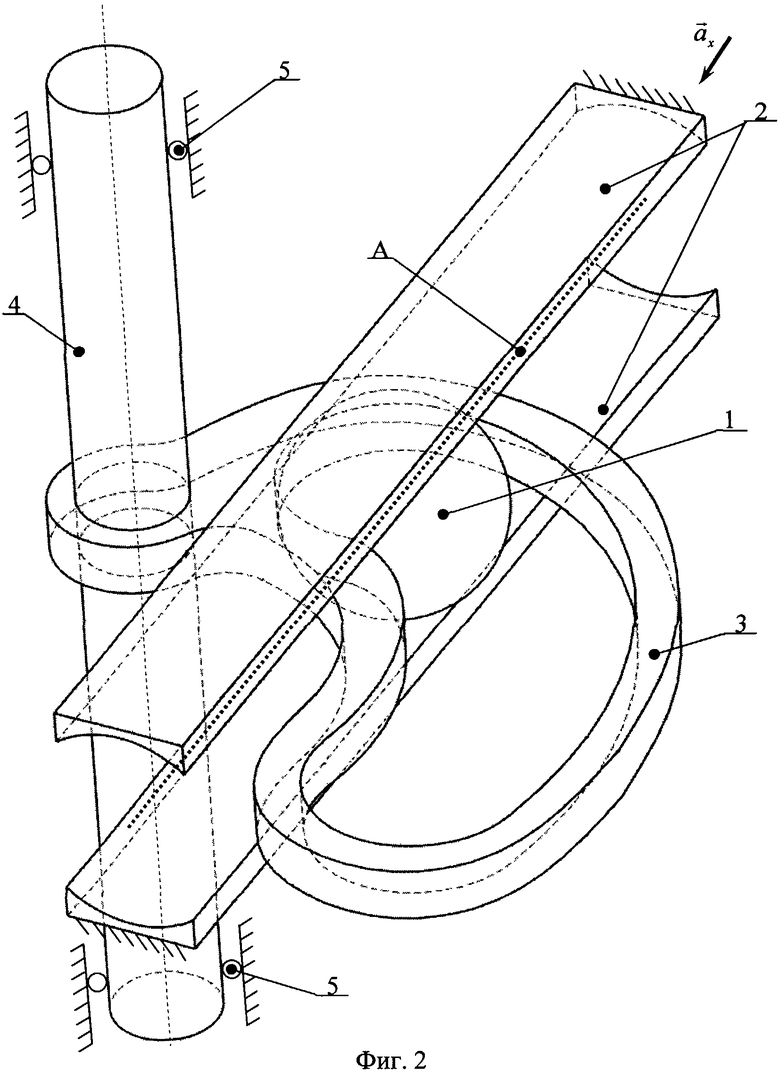
На фиг.1 представлено схематическое изображение заявляемой конструкции кулачкового механизма с углом поворота оси кулачка φ=90°, начальное положение; на фиг.2 - то же, конечное положение.
Кулачковый механизм (фиг.1) содержит сферическое тело 1, которое перемещается вдоль фиксированных направляющих 2, и кулачок 3 с профилированным пазом, при этом геометрический центр сферического тела 1 перемещается по прямой А. Профилированный кулачок 3 жестко закреплен на валу 4. Вал 4 установлен в опорах 5 с возможностью вращения вокруг своей оси. При этом расстояние между осью вала (осью вращения кулачка 3) и прямой А равно r0 (радиус эвольвентной окружности). Сферическое тело 1 находится одновременно в пазу кулачка 3 и между направляющими 2. Координаты кривой, по которой очерчена одна из поверхностей кулачка, определяются согласно следующим выражениям (Механизмы. С.Н.Кожевников, Я.И.Есипенко, Я.М.Раскин. - М.: «МАШИНОСТРОЕНИЕ», 1965, 176 с):
 ,
,
где ρ - текущий радиус-вектор эвольвенты;
α - параметр - угол давления, заключенный между радиусом и перпендикуляром, восстановленным из центра окружности (в заявляемом механизме, находящемся на оси вращения кулачка) к нормали;
 - эвольвентная функция;
- эвольвентная функция;
r0 - радиус эвольвентной окружности.
Другая поверхность кулачка 3 является эквидистантой по отношению к первой и расположена от нее на расстоянии, выбранном не менее диаметра сферического тела 1.
Угол поворота φ кулачка выбирается из условий решаемой задачи.
Работа заявляемого устройства показана на примере кинематики инерционного интегрирующего прибора, где требуется обеспечение максимально возможного крутящего момента на оси кулачка, не зависящего от его угла поворота. На фиг.1 показано начальное положение сферического тела 1 и кулачка 3. При действии ускорения  (на фиг.1, 2 показано стрелкой) на сферическое тело 1 последнее совершает поступательное перемещение вдоль направляющих 2 (геометрический центр сферического тела 1 перемещается вдоль прямолинейной траектории А), увлекая за собой кулачок 3 и перекатываясь вдоль направляющих 2 до достижения своего конечного положения, когда сферическое тело 1 и кулачок 3 останавливаются (фиг.2). При этом достигаются максимально возможный и не зависящий от угла поворота кулачка момент на его оси; увеличение КПД и уменьшение массогабаритных характеристик.
(на фиг.1, 2 показано стрелкой) на сферическое тело 1 последнее совершает поступательное перемещение вдоль направляющих 2 (геометрический центр сферического тела 1 перемещается вдоль прямолинейной траектории А), увлекая за собой кулачок 3 и перекатываясь вдоль направляющих 2 до достижения своего конечного положения, когда сферическое тело 1 и кулачок 3 останавливаются (фиг.2). При этом достигаются максимально возможный и не зависящий от угла поворота кулачка момент на его оси; увеличение КПД и уменьшение массогабаритных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Зубчатый редуктор | 1988 |
|
SU1551891A1 |
| Гидрораспределитель механизированной крепи | 1987 |
|
SU1441086A1 |
| ТОПЛИВНЫЙ НАСОС | 1990 |
|
RU2008507C1 |
| Кулачковый механизм | 1985 |
|
SU1298459A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД И СПОСОБ РЕГУЛИРОВКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2000 |
|
RU2174626C1 |
| Зубчатая передача | 1984 |
|
SU1240977A1 |
| Кривошипный пресс | 1990 |
|
SU1776236A3 |
| Приспособление к эвольвентомерам для проверки профиля зубьев конических колес, образованных по сферической эвольвенте или октоиде | 1944 |
|
SU64740A1 |
| Толкатель топливного насоса | 1990 |
|
SU1763700A1 |
| КУЛАЧКОВЫЙ МЕХАНИЗМ | 2002 |
|
RU2205999C1 |
Изобретение относится к машиностроению, в частности к механизмам преобразования возвратно-поступательного движения во вращательное. Кулачковый механизм содержит кулачок с профилированным пазом, толкатель в виде сферического тела и его направляющие. Сферическое тело установлено в профилированном пазу кулачка и между направляющими с возможностью качения вдоль них. Паз образован двумя профилированными эквидистантными поверхностями, находящимися друг от друга на расстоянии не менее диаметра сферического тела. Каждая поверхность сформирована образующей кривой, которая является эвольвентой окружности. Центр окружности лежит на оси вращения кулачка, а радиус окружности равен расстоянию между осью вращения кулачка и прямолинейной траекторией перемещения геометрического центра сферического тела. Технический результат состоит в обеспечении максимально возможного и не зависящего от угла поворота кулачка момента на его оси, увеличении КПД и уменьшении массогабаритных характеристик. 2 ил.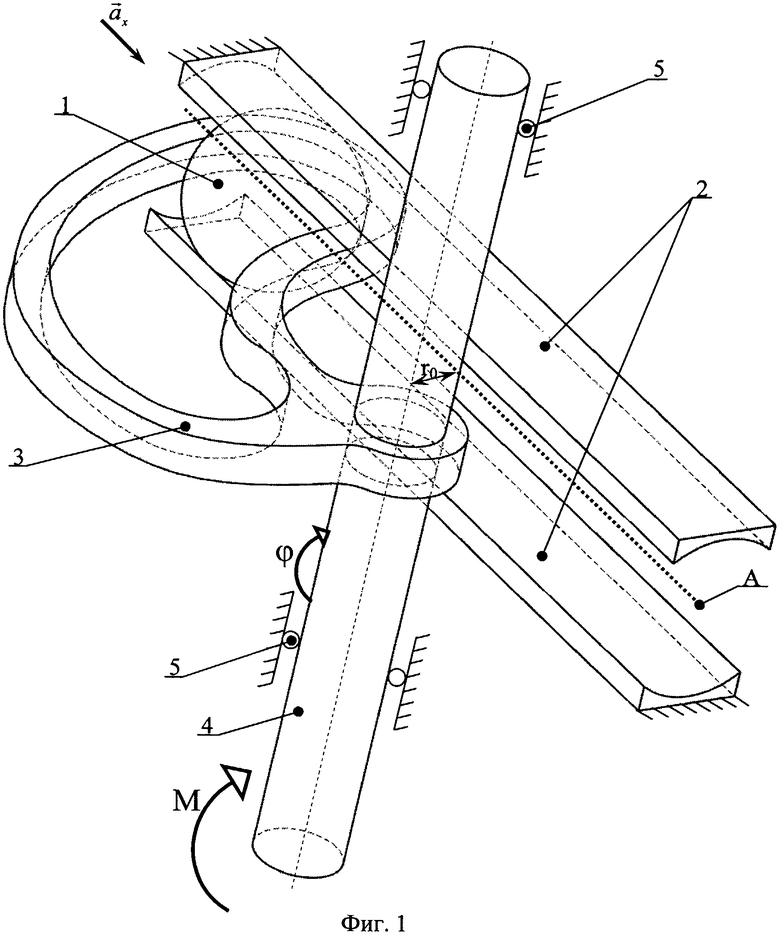
Кулачковый механизм, содержащий кулачок с профилированным пазом, толкатель и его направляющие, отличающийся тем, что толкатель выполнен в виде сферического тела, установленного в профилированном пазу кулачка и между направляющими с возможностью качения вдоль них, а профилированная поверхность кулачка образована двумя эквидистантными поверхностями, каждая из которых сформирована образующей кривой, являющейся эвольвентой окружности с центром на оси вращения кулачка и радиусом, равным расстоянию между осью вращения кулачка и прямолинейной траекторией перемещения геометрического центра сферического тела, при этом расстояние между указанными поверхностями выбрано не менее диаметра сферического тела.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КАНАЛА СВЯЗИ ПО ОТНОШЕНИЮ СИГНАЛ/ПОМЕХА ПРИ ПЕРЕДАЧЕ | 0 |
|
SU330559A1 |
| ЛИНИЯ ПО ОТБРАКОВКЕ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2722553C1 |
| US 4651579 A, 24.03.1987 | |||
| WO 2009090611 A1, 23.07.2009 | |||
| Кулачковый механизм | 1978 |
|
SU806952A1 |

