1
.(21) 4495428/15 (22) 18„07„88 (46) 30„04о910 Бюл, № 16 (7) Кировоградский институт сельскохозяйственного машиностроения и Всесоюзный научно-исследовательский институт по испытанию машин и оборудования для животноводства и кормопроизводства
(72) Г0Р, Носов, В0 Во Брей, В А„ Шалимов, В„МоКалич, Л0М„Токарь, В,Ф„Пащенко, Э°Ио Гайсинекий и В0Н„Скугарев (53) 681.268008(088о8) (56) Авторское свидетельство СССР № 793515, кл. А 01 К 5/02, 1981.
54) АВТОМАТИЧЕСКИЙ ДОЗАТОР КОРМОВ (57) Изобретение относится к технике дозирования и может быть использовано для индивидуального автоматического порционного кормления животныхо Цель изобретения - повышение эффективности работы дозатора путем сокращения потерь корма при кормлении и повышении точности дозированияо Автоматический дозатор кормов содержит вибрационный питатель 1 весы с коромыслом 2, установленные на призме 3 опорной стойки 40 Левое плечо коромысла снабжено накопителем 5 с днищем b и электромеханической защелкой 70 Праi
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический дозатор кормов | 1990 |
|
SU1803008A1 |
| Автоматический дозатор кормов | 1979 |
|
SU793515A1 |
| Автоматический дозатор кормов | 1981 |
|
SU961615A1 |
| Устройство для дозированного кормления животных | 1986 |
|
SU1442150A1 |
| Устройство для автоматической раздачи корма | 1980 |
|
SU897187A1 |
| УСТРОЙСТВО ДЛЯ ПРИГОТОВЛЕНИЯ МНОГОКОМПОНЕНТНЫХ СМЕСЕЙ | 2012 |
|
RU2494658C1 |
| Автоматический кормораздатчик для индивидуальной раздачи корма скоту при привязном содержании | 1989 |
|
SU1722333A1 |
| Система индивидуальной раздачи концентрированных кормов | 1990 |
|
SU1750520A1 |
| КОРМОРАЗДАТЧИК | 1998 |
|
RU2134958C1 |
| КОНВЕЙЕРНАЯ СИСТЕМА УНИВЕРСАЛЬНАЯ БЛОЧНО-ИНТЕГРАЛЬНО-СЕКЦИОННАЯ ЗООПЕРЕРАБАТЫВАЮЩАЯ | 2002 |
|
RU2239982C2 |

о
4ь
4
оо
4ь ЈД
вое плечо коромысла 2 оборудовано I противовесом 8, в виде гайки, имеющей возможность перемещения по плечу коромысла в требуемых пределах, и план- кой 9 с фольгированной меткой,, Дозатор снабжен также наклонным желобом Юо Система управления дозатором содержит блок распознавания, программное устройство, блок отработки про- граммы и датчик наличия животного0 Управление электромеханической защелкой 7 осуществляется электроприводом 15 защелки 7, управляемым датчиком 16 загрузки накопителя,, Дозатор кормов содержит также вибрационную катушку 28 питателя, противовес г 8 накопителя о Доза корма выгружается в кормушку 300 Но сигналу блока распозна
| Изобретение относится к технике дозирования и может быть использова- но для индивидуального автоматического порционного кормления животных.
Цель изобретения - повышение эффективности работы дозатора путем сокращения потерь корма при кормлении и повышение точности дозирования0
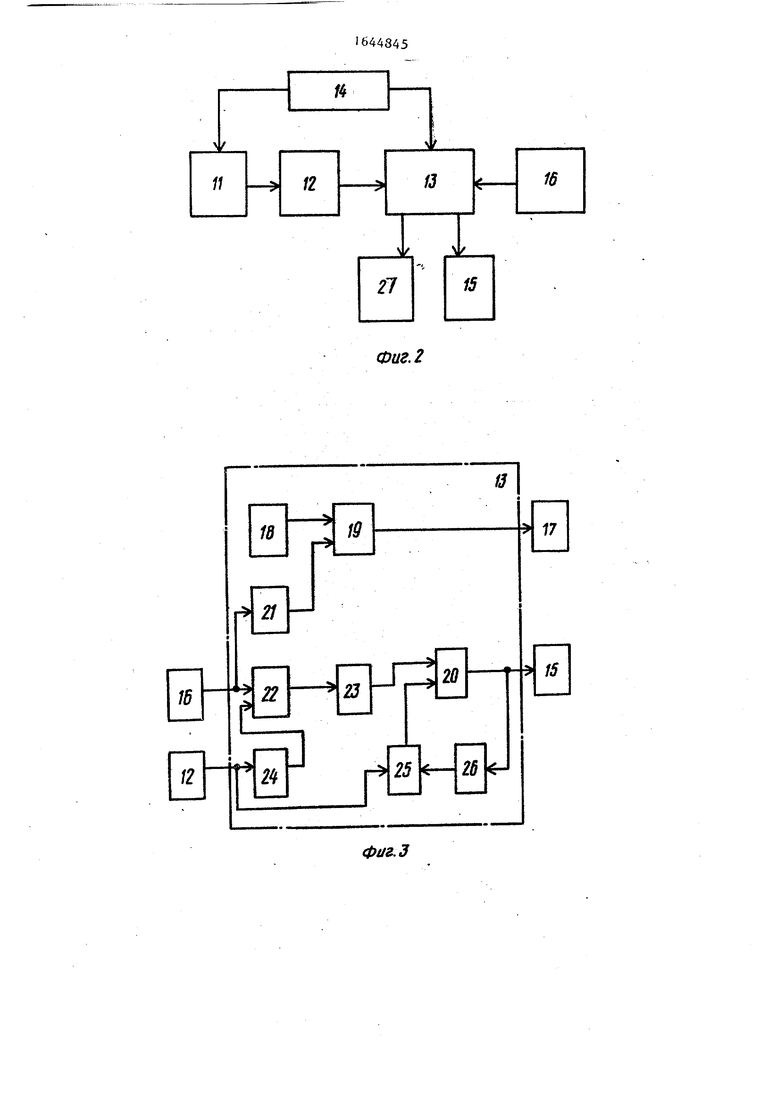
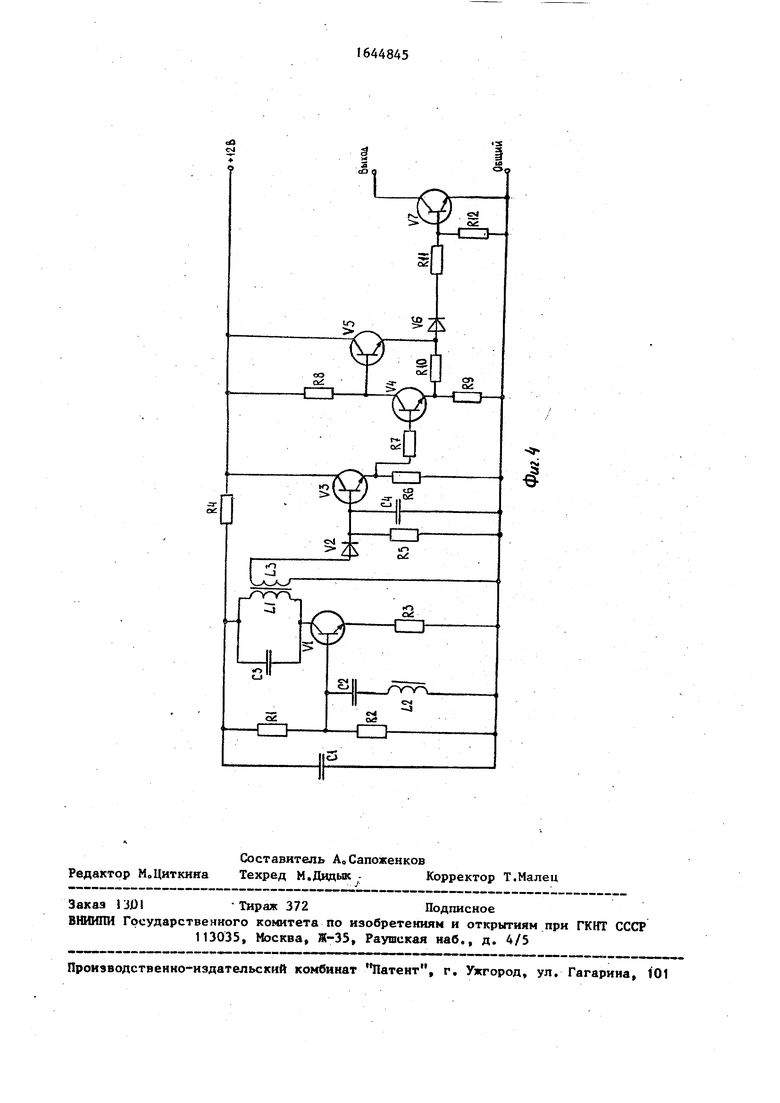
На фиго I изображена схема дозатора; на фиго 2 - система управления работой дозатора кормов; на - блок-схема управления дозатором с расшифровкой строения блока отработки программы; на фиг04 - электрическая схема датчика загрузки накопителя0
Автоматический дозатор кормов содержит вибрационный питатель 1, весы с коромыслом 2, установленным на призме 3 опорной стойки 4о Левое плечо коромысла снабжено накопителем 5с днищем 6 и электромеханической защелкой 7 о
Правое плечо коромысла оборудовано противовесом в виде гайки 8, имеющей возможность перемещения по плечу коромысла в заданных пределах, и планкой 9 с фольгированной меткой.
Для выгрузки взвешенной дозы корма дозатор снабжен наклонным желобом 10в
Система управления дозатором содержит последовательно соединенные блок 11 распознавания животных, программное устройство 12 и блок 13 отработки программно
вания запрограммированное число импульсов программного устройства отрабатывается блоком отработки программы,, Срабатывает электропривод 15 разгрузки дозатора, освобождая днище 6 накопителя 5, в результате доза корма выгружается в кормушку 30, После ссыпания корма днище закрывается и коромысло возвращается в исходное положение,, Под действием датчика 16 начинает работать вибрационная катушка 28 питателя до момента выхода фольгированной метки планки 9 из зазора датчика 16 Работа питателя прекращается,, При подаче импульса на электропривод 15 электромеханической за- щелки 7 происходит новый цикл разгрузки дозатора 4 ил0
0
35
4Q
дс
0
5
На выходе блока распознавания формируется номер животного в двоично- десятичном коде, который поступает на адресный вход программного устройства,,
В качестве программного устройства
12используется постоянное запоминающее устройство (ПЗУ), например, типа К573РФ20 На адресный вход ПЗУ от блока распознавания поступает номер животного,, Согласно этому номеру из соответствующей ячейки памяти ПЗУ на информационном входе появляется предварительно записанная в данную ячейку информация о количестве , который необходимо выдать животному с этим но- меромо Данная информация поступает в блок 13 отработки, программы,,
На входы блокЬв 11 и 13 соответственно распознавания и отработки программы подается информация с выходов датчика 14 наличия животного,,
На фигоЗ приведена часть блок-схемы управления дозатором с расшифровкой строения блока 13 отработки программы Она содержит программное устройство 12, электропривод 15 разгрузки, датчик 16 загрузки накопителя и электропривод 17 вибропитателя, блок
13отработки программы,, Блок отработки программы состоит из генератора 18 низкой частоты, ключей 19 и 20, инвертора 21, схемы И 22, ждущего мультивибратора 23, схемы И-НЕ 24, схемы сравнения 25 и счетчика 26„
Блок функционирует в следующем порядке
При отсутствии животного у кормушки с выхода программного устройства 12 на вход схемы И-НЕ 24 поступают все единицыо На входе схемы И-НЕ формируется нулевой сигнал, который запирает элемент И 22, и выгрузка корма не происходит при любом сигнале с датчика 160 Если накопитель корма не заполнен порцией, с выхода датчика 16 поступает нуль, который инвертируется схемой НЕ, открывается ключ 19, низкочастотные колебания с генератора 1 поступают на электромагнит 17 питателя«, Происходит процесс поступления корма в накопитель. При достижении веса корма в накопителе, равного заданному, состояние датчика 16 изменяется, на выходе схемы появляется нуль, который запирает ключ 19, Процесс загрузки накопителя прек- ращается, однако выгрузки накопителя не происходит, так как работа электропривода 15 разгрузки блокируется
устройства 120
При появлении животного у кормушк с выхода программного устройства 12 поступает информация о количестве кома, которое требуется выдать данному животномуо На выходе схемы И-НЕ 24 появляется единица. При этом срабатывает жйущий мультивибратор 23, ко
торый формирует короткий импульс на - разгрузку накопителя с помощью электропривода разгрузки 150 Этот же импульс поступает на счетчик 26, в котором осуществляется подсчет выданны порцийа После разгрузки накопителя датчик 16 изменяет свое состояние, и происходит процесс загрузки накопителя, который был описан ранее0 Посл эаг рузки накопителя датчик 16 вновь изменяет свое состояние, через схему И 22 запускается ждущий мультивибратор 23, и происходит-разгрузка очередной порции. В дальнейшем цикл работы повторяется о Число выданных порций учитывается счетчиком 26 и постоянно сравнивается схемой сравнения 25 с числом, заданным с программного устройства 12, Как только число выданных порций станет равным заданному, на выходе схемы сравнения 25 формируется нуль, который блокирует через ключ 20 срабатывание электропривода 5 разгрузки,,
-
10
30
20
448456
Если в процессе выдачи корма жи- |вотное отойдет от кормушки, то выдача корма происходить не будет, т.к сигнал выдачи будет блокироваться от программного устройства через элемент И-НЕ 24,
Блок 13 отработки программы своими выходами связан с датчиком 14 наличия животного,,. Раз груз ка-дозы корма из накопителя 5 осуществляется открытием днища 6 с помощью электромеханической защелки 7 под действием электропривод 15 разгрузки, управляемого дат- 15 чшсом 16 загрузки накопителя„
Датчик 16 - серийно выпускаемый датчико Принципиальная электрическая схема датчика приведена на фиг„40 На транзисторе VI собран генератор синусоидальных колебанийо Если между катушками L1 и L3 нет металлической пластины, то колебания, создаваемые в контуре L1C3, наводятся в катушке L3 и выпрямляются диодом V20 Открывают- 25 Ся транзисторы V3 и V4, закрываются транзисторы V5 и V7, На выходе датчика сигнал единицы При попадании между катушками L1 и L3 металлической пластины связь между ними нарушается и в катушке L3 колебания не наводятсяо Транзисторы V3 и V4 закрываются, а транзисторы V4 и V7 открываются. На выходе датчика сигнал нуля о
Конструктивно датчик выполнен таким образом, что между катушками L1 и L3 имеется прорезь, в которой может перемещаться пластина,
В качестве датчика 14 может быть 40 использован, например, геркон, кото35
рый срабатывает от взаимодействия с магнитом, расположенным на ошейнике животного.
Дозатор кормов содержит также вибрационную катушку 28 питателя и противовес 29 накопителя 5, Доза корма выгружается в кормушку 300
Дозатор работает следующим образом,
При движении животного через блок 11 распознавания считывается его номер с передачей сигнала на программное устройство 12, н котором записана норма для каждого животного Запрограммированное число импульсов или циклов дозирования отрлбатывается блоком 13 отработки программы Контроль за отработкой программы автоматически передается на датчик 14 наличия животного у кормушки0 Одновременно со срабатыванием датчика 14 наличия срабатывает электропривод 15 разгрузки дозатора, освобождая днище 6 накопителя 5 от электромеханической защелки 7 В результате предварительно взвешенная доза корма либо корм оставшийся несъеденным предыдущим животным, выгружается по нак- лонному желобу 10 в кормушку 300 После осыпания корма электропривод 15 обесточивается, днище накопителя возвращается в исходное положение и фиксируется электромеханической защелкой 6 вследствие инерционной силы противовеса 29. После разгрузки накопителя коромысло 2 весового механизма возвращается в первоначальное положе - ние под действием противовеса 8, а фольгированная метка планки 9, находившаяся при разгрузке над датчиком 16, опускаясь, входит в зазор датчика и вызывает появление логической единицы, что характеризует начало
работы вибрационной катушки 28 питателя с Когда вес загружаемого корма достигает равенства с весом противовеса 8, коромысло начинает занимать горизонтальное положение0 Планка 9, шарнирно связанная с коромыслом, начинает подниматься, и в момент выхода фольгированной метки из датчика 16, прекращается работа питателя,, Коромысло склоняется в сторону питателя к наклонному желобу 10, и по окончании паузы включается электропривод 15 разгрузки - происходит разгрузка дозаторао Число циклов дозирования зависит от заданной программы,, При этом последний цикл не заканчивается срабатыванием электропривода 15 разгрузки дозаторао При прохождении следующего животного через блок распознавания цикл выдачи первой порции и дальнейшей отработки программы повторяет СЯ0
Формула изобретения
Автоматический дозатор кормов, содержащий питатель, весы с коромыслом, одно плечо которого снабжено накопителем с откидным днищем и защелкой последнего с электроприводом, а другое плечо коромысла оснащено противовесом, и систему управления,включающую программное устройство, подключенное входом к выходу блока распознавания, отличающийся тем, что, с целью повышения эффективности в работе дозатора путем сокращения потерь корма при кормлении и повышения точности дозирования, он снабжен вибратором с электроприводом, датчиком наличия животного, датчиком загрузки накопителя и блоком отработки программы, а коромысло весов оснащено призмами, установленными в регулируемых ограничителях, при этом защелка накопителя снабжена механическим зацепом, а противовес установлен с возможностью перемещения вдоль коромысла, причем коромысло снабжено планкой с фольгированной меткой, расположенной в зазоре датчика загрузки накопителя, при этом входы блока отработки программы соединены с выходами программного устройства, датчика наличия животного и датчика загрузки накопителя, а первый и второй выходы соединены соответственно с входами управления электроприводов вибратора и защелки днища накопителя, а выход датчика наличия животного подключен к входу блока распознавания
Составитель А0Сапоженков
Корректор Т.Малец
Редактор МоЦиткина Техред М.Дидык
Заказ НО -Тираж 372Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская иаб„, д. 4/5
Л
Корректор Т.Малец
