33 35
го
П
//////////// //////7 //}f /f7 /////f /
Jin
4
4i
Ю

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство с грузоподъемным устройством | 1985 |
|
SU1293931A1 |
| Машина для транспортирования и вертикальной саморазгрузки и самопогрузки емкости | 2022 |
|
RU2789920C1 |
| ТРАНСПОРТНО-СПЛОТОЧНЫЙ АГРЕГАТ | 1973 |
|
SU408847A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ МОНТАЖА МОБИЛЬНОГО ОБЪЕКТА | 1996 |
|
RU2097312C1 |
| МОСТОУКЛАДЧИК | 1996 |
|
RU2102554C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| СПОСОБ АГРЕГАТИРОВАНИЯ НАБОРА СМЕНЯЕМЫХ МОДУЛЕЙ-АДАПТЕРОВ И БЛОКОВ ИЗ НИХ С ЭНЕРГОСРЕДСТВОМ ДЛЯ ВЫПОЛНЕНИЯ МЕХАНИЗИРОВАННЫХ РАБОТ ПРИ ПРОИЗВОДСТВЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2431954C2 |
| АГРЕГАТ РЕМОНТНО-БУРОВОЙ АР32/40 | 2007 |
|
RU2380512C2 |
| Устройство для погрузки, выгрузки и транспортировки длинномерных грузов | 1978 |
|
SU789299A1 |

Изобретение относится к транспортным средствам для перевозки крупногабаритных грузов. Целью изобретения является повышение надежности путем равномерного распределения нагрузки. Транспортное средство содержит самоходное шасси 1 с рамой 2, в задней части которой шарнирно закреплена грузовая рама 4 с гуськом 5 Привод прворота рамы -выполнен в виде гидроцилиндра 7, закрепленного на раме 2. К раме 4 с возможностью перемещения относительно нее прикреплена каретка 10, на которой на оси закреплен двуплечий рычаг, плечи которого соединены со штоками гидроцилиндров перемещения каретки 10. Гидроцилиндры закреплены на перекладине рамы 4. На каретке 10 закреплен основной захват 14, а на грузовой раме 4 шарнирно закреплены рычаги 29 дополнительного захвата изделия. На конце гуська 5 в средней и в нижней частях грузовой рамы 4 закреплены блоки для заправки грузового каната 20, один конец которого связан с грузом 34, а второй закреплен на каретке 10. На гуське закреплены гидроцилиндры 26, связан- ные штоками с рамкой 24, закрепленной на гуське 5, для дополнительного натяжения грузового каната 20. 1 з.п. ф-лы, 5 ил. W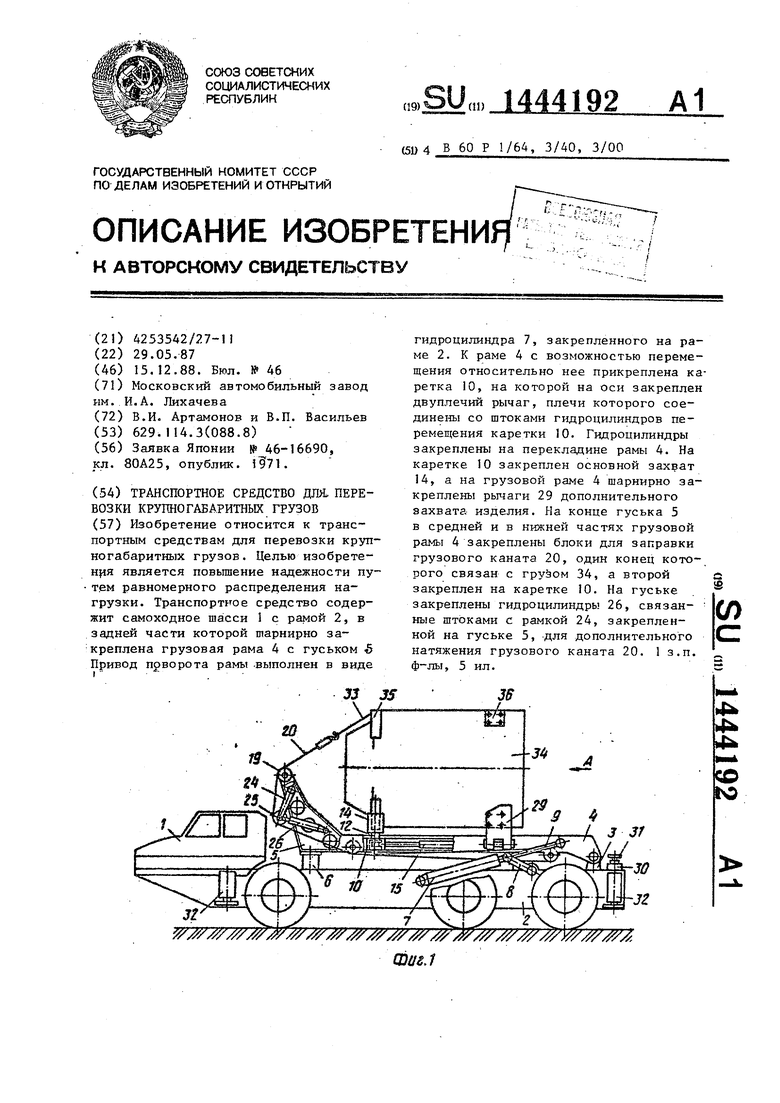
шаи
Изобретение относится к транспортному машиностроению, в частности к транспортным средствам для перевозки Крупногабаритных тяжеловесных грузов, используемых в строительстве, черной и цветной металлургии и нефтеперерабатывающей промышленности, выполненных в виде тел вращения (например бетоносмесители, рессиверы, конверторы, коксовые камеры, сталеразли- вочные ковши, емкости для нефтепродуктов).
Целью изобретения являе.тся повышение надежности путем равномерного распределения нагрузки.
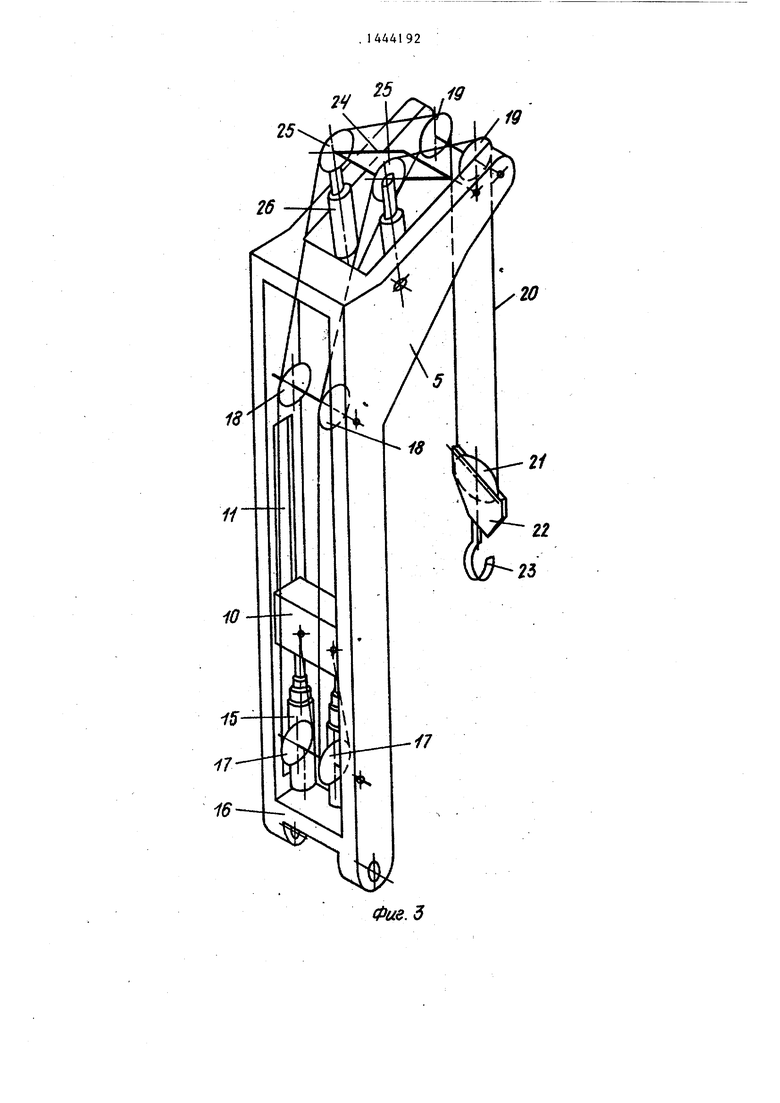
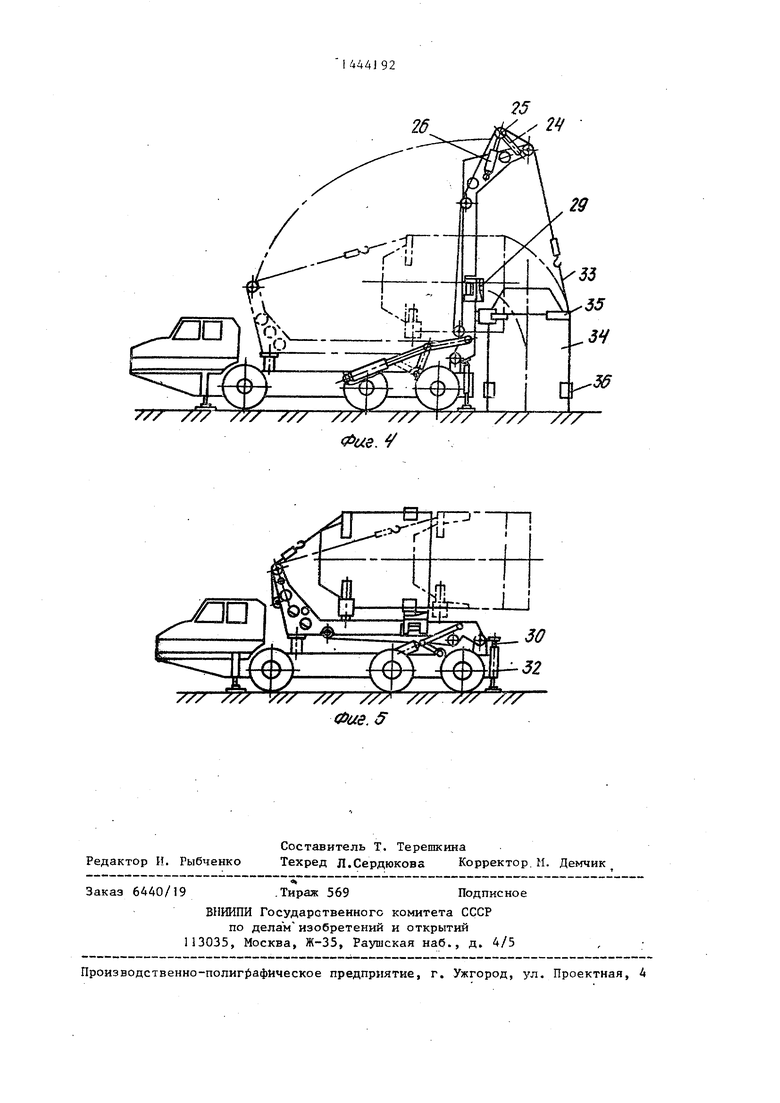
На фиг. 1 представлено транспортное средство, общий вид; на фиг.2 - вид А на фиг. Г (с поднятой грузовой рамой)j на фиг. 3 - запасовка грузового каната и механизм его натяжения, в аксонометрии; на фиг. 4 - транспортное средство, начальная стадия погрузки перевозимого груза; на фиг.5- то же, заключительная стадия погрузки перевозимого груза.
Транспортное средство содержит самоходное шасси 1, в задней части рамы 2 которого закреплены неподвижно
ней части оси 12. закреплен двуплечий рычаг 13, а снаружи корпуса каретки 10 неподвижно установлен изогнутый основной захват 14 П-образного сече-, ния. Передвижение каретки 10 по направляющим вдоль прорезей 11 и поворот захвата 14 в поперечной плоскости производятся с помощью теле10 скопических гидроцилиндров 15 двустороннего действия, штоки которых шар- н ирно связаны с концами двуплечего рычага 13, а корпуса закреплены шар- нирно на поперечине 16, неподвижно
15 закрепленной в задней части грузовой рамы 4.
Через неподвижные блоки 17, 18 и 19, смонтированные внутри нижней и средней частей рамы 4 и в верхней
20 части гуська 5, запасован грузовой канат 20, один конец которого связан с грузом, а другой конец закреплен на корпусе каретки Ю. На сгибе ка-.- ната 20 установлен подвижный блок
25 21 с обоймой 22 и грузовым крюком 23 для связи с грузом. Такая запасовка грузового каната 20 обеспечивает синхронное перемещение подвижного блока 21, соответствующего направпроушины 3 с установленной в них шар- 30 лению и величине перемещения каретки
нирно на поперечно размещенной оси .грузовой рамой 4, снабженной размещенным под углом к ней вильчатым гуськом 5. При горизонтальном поло- жейии грузовой рамы 4 гусек 5 опирается на кронштейн 6, неподвижно закрепленный на раме 2. Поворот грузовой рамы 4 в вертикальной продольной плоскости осуществляется силовыми гидроцилиндрами 7, корпуса которых щарнирно связаны с рамой 2, а штоки шарнирно установлены на одних осях с рычагами 8 и 9, противоположные концы которых шарнирно соединены соответственно с рамой 2 и грузовой рамой 4. Для уменьшения габаритов гидроцилиндров 7 и увеличения угла поворота грузовой рамы 4 рычаги 8 и 9 имеют различную длину. Между лонжеронами рамы 4 размещена каретка 10. Связь между кареткой; 10 и гру- . зовой рамой 4 осуществляется с помощью установленных в лонжеронах направляющих (не показаны) и выполнен35
40
45
50
10 вдоль рамы 4. Дополнительное перемещение подвижного блока 21 независимо от передвижения каретки 10 для натяжения каната 20 осуществляется механизмом, выполненным в виде плоской рамки 24, один конец которой шарнирно связан с гуськом 5, а другой конец, оборудованный блоками 25, щарнирно соединен со штоком гидроцилиндров 26, корпуса которых подвижно закреплены на гуське 5. Механизм натяжения, расположенный между консолями гуська 5, минимально выступает над ним, обеспечивая компактность конструкции.
На боковых сторонах грузовой рамы 4 с помощью корпусов 27 и 28 симмет- рично установлены откидные залсимные рычаги 29 дополнительного захвата. Для поворота откидных рычагов 29 дополнительного захвата в корпус 27 встраиваются поворотные лопастные гидродвигатели (не показаны), ротными валами которых могут служить
ных
в раме 4 прорезей П.. Каретка 10 , 0(т:и 28. В задней части рамы 2 неподоборудована опорными катками (не показаны), взаимодействующими с направляющими и осью 12, шарнирно установленной в корпусе каретки 10. В средвижно смонтированы гидравлические опоры 30, штоки которых снабжены са- моустанавливаюп имися с помощью сферических шарниров подпятниками 31, Ус10 вдоль рамы 4. Дополнительное перемещение подвижного блока 21 независимо от передвижения каретки 10 для натяжения каната 20 осуществляется механизмом, выполненным в виде плоской рамки 24, один конец которой шарнирно связан с гуськом 5, а другой конец, оборудованный блоками 25, щарнирно соединен со штоком гидроцилиндров 26, корпуса которых подвижно закреплены на гуське 5. Механизм натяжения, расположенный между консолями гуська 5, минимально выступает над ним, обеспечивая компактность конструкции.
На боковых сторонах грузовой рамы 4 с помощью корпусов 27 и 28 симмет- рично установлены откидные залсимные рычаги 29 дополнительного захвата. Для поворота откидных рычагов 29 дополнительного захвата в корпус 27 встраиваются поворотные лопастные гидродвигатели (не показаны), ротными валами которых могут служить
0(т:и 28. В задней части рамы 2 неподвижно смонтированы гидравлические опоры 30, штоки которых снабжены са- моустанавливаюп имися с помощью сферических шарниров подпятниками 31, Ус31
тойчивость транспортного средства во время проведения погрузочно-раз- грузочных работ обеспечивается аутригерами 32, представляющими собой консоли с гидравлическими домкратами на концах, -расположенными в передней и задней частях раьяы 2. Грузовой крюк 23 оборудован стропами 33, кониы которых соединяются с перевозимым гру- зом 34. Перевозимый груз 34 оснашен ответными стыковочными узлами 35 и 36, соединяющимися с основным захватом 14, откидными рычагами 29 дополнительно захвата и стропами 33.
Устройство работает следуюпцт образом.
Транспортное средство задним ходом подъезжает к перевозимому грузу 34, и штоки аутригеров 32 опускают опорные плиты на грунт, создавая необходимую устойчивость для осуществления погрузки. Поворачиваясь на ося 28 относительно корпусов 27 с помощью, гидродвигателей, рычаги 29 допол нительного захвата откидьгоаются. Силовые гидроцилиндры 7, выдвигая синхронно свои штоки, воздействуют на шарнирно сочлененные рычаги 8 и 9, поворачивая тем- самым грузовую раму 4 в вертикальной продольной плоскости. Угол поворота рамы 4 должен быть таким, чтобы обеспечивать пространство для свободного размещения изогнутого основного захвата 14 между рамой ,4 и грузом 34. Гидравлические опоры 30, взаимодействуя подпятниками 31 с нижней плоскостью силовой . поперечины 16, осуществляют точное фиксирование грузовой рамы 4 в верти кольнрм положении и снижение нагрузок на гидроцилиндры 7. Каретка 10, находящаяся на минимально возможном расстоянии от гуська 5, под действием телескопических гидроцилиндров 15, уменьшающих синхронно вылет своих штоков, перемещается, вместе с изогнутым основным захватом 14 вдоль рамы 4 на высоту, соответствующую верхним стыковочным, узлам 35, расположенным на грузе 34 (фиг. 2). Одновременно с передвижением каретки 10 перемещается на высоту верхних стыковочных узлов 35 связанный с кареткой 10 грузовым канатом 20 подвижный блок 21 с обоймой 22 и крюком 23.Если груз 34 расположен на опорной поверхности под углом к грузовой раме 4 в вертикальной поперечной
924
плоскости, то Р гидроцилиндры 15 подается различное давление, при этом увеличивается вылет гатока одного гидроцилиндра и уменьшается вылет штока другого. В результате гидроцилиндры 15 с помощью двуплечего рычага 13 поворачивают ось 12 с захватом 14 в вертикальной поперечной плоскости на ут ол, соответствующий наклону верхних стыковочных узлов 35 перевозимог груза 34 (фиг. 2). Дальнейшее выдвижение штоков гидроцилиндров 7 и соответствующее этому уменьшение длины штоков гидравлических опор 30 обеспечивают дополнительный поворот грузовой рамы 4 и соединение изогнутого основного захвата 14 с верхними стыковочными узлами 35 перевозимого груза 34 (фиг. 4). Закрепив захват 14 на грузе 34, присоединяют концы стропов 33 к стыковочным узлам 35, находящимся на диаметрально противоположной стороне груза 34. Гидроцилиндры 26, выдвигая штоки, поворачивают плоскую рамку 24 с блоками 25 на определенный угол, обеспечиваюсшй натяжение грузового каната 25. Все это способствует тому, что весовые нагрузки распределяются равномерно между захватом 14 и грузовым канатом 20, уменьшается изгибаюрщй момент, действующий на захват 14, а также происходит выбор зазоров в верхних стыковочных узлах 35. Степень натяжения грузового каната 20 зависит от веса перевозимого груза. После закрепления груза 34 посредством захвата 14 на раме. 4 гидроцилиндры 7, втягивая штоки, переводят раму 4 в горизонтальное положение и она нижней частью гуська 5 опирается на кронштейны 6 (фиг. 5). Телескопические гидроцилиндры 15, выдвигая оттоки перемещают каретку 10 с грузом 34 вдоль рамы 4 по направляющим в направлении к гуську 5, при этом груз 34 удерживается с одной стороны изогнутым захватом 14, ас другой - грузовым канатом 20. Если захват 14 с прикрепленным к нему грузом 34 находится в вертикальней поперечной плоскости, гидроцилиндры 7 сначала переводят раму 4 в горизонтальное положение, а потом телескопические гидроцилиндры 15 поворачивают груз 34 в горизонтальной плоскости так, чтобы его продольная ось совпала с продольной осью транспортного средства.
Далее гидроципиндры 15, синхронно выдвигая штоки, перемещают каретку 10 с грузом 34 в направлении гуська 5. Когда нижние стыковочные узлы 36 груза 34 оказываются под откидными рычагами 29 дополнительного захвата. гидроцилиндры 15 останавливают каретку 10 и откидные рычаги 29, поворачиваясь гидродвигателями на осях 28, просоединяются своими узлами крепления к нижним стыковочным узлам 36 груза 34. Гидроцилиндры 26, перемещая рамку 24 с блоками 25,. позволяют точно произвести стыковку нижних уз- лов 36 перевозимого груза 34 с узлам крепления откидных рычагов 29 и распределить равномерно вес груза между захватом 14 и рычагами 29. Аутригеры 32 вывешивают опорные плиты в транс- портное положение.
Погрузка закончена, транспортное средство готово к перевозке груза (фиг. 1). Разгрузка происходит в обратной последовательности.
Если перевозимый груз 34 находит- Ья на ровной опорной поверхности, погрузка может производиться следующим образом.
Транспортное средство с предвари- тельно поднятой в вертикальное положение грузовой рамой 4 и откинутыми рычагами 29 дополнительного захвата задним ходом с минимальной скоростью подъезжает к грузу 34. Гидроцилиндры 15, перемещая каретку 10, устанавливают изогнутый захват 14 на одну высоту с верхними стыковочными узлами 35 груза 34. Транспортное средство движется до тех пор, пока .захват 14 не соединится со стыковочными узлами 35. После этого стропы 33 также закрепляются на грузе 34. Аутригеры 32 опуская опорные плити, подготавливают транспбртное средство к дальнейше работе. Далее процесс погрузки анало гичен описанному ранее. ,
Если груз 34 необходимо установит на монтажные площадки (конструкции), идроцилиндры 7 переводят раму 4 в вертикальное положение, а телескопические гидроцилиндры 15 перемещают каретку 10 с грузом 34 на нужную высоту.
Транспортное средство может ра- ботать в режиме CTpenoBot-o крара для подъема грузов, если они находятся н образующей поверхности (бетоносмесители, ресиверы) или расположены на
поверхности, уровень которой ниже уровня, на котором находится транспортное средство. В зтом случае грузы закрепляются на грузовой крюк 23 или стропы 33, вертикальное перемещение которых производится передвижением каретки 10 и подвижного блока 21, а угловое перемещение осуществляется грузовой рамой 4, способной благодар сочлененным рычагам 8 и 9 и гидроцилиндрам 7 поворачиваться из горизонтального положения на угол более 90 Для сокращения времени погрузочно разгрузочных работ наклон грузовой рамы 4 гидроцилиндрами 7 сопровождается одновременным перемещением гидроцилиндрами 15 каретки 10 с закрепленным на ней грузом 34 вдоль рамы 4 В случае необходимости при подаче разного давления рабочей жидкости в гидроцилиндры 15 перемещение каретки 10 сопровождается одновременным поворотом захвата 14 на оси 12.
Формула изабрете ния
закрепленные в задней части грузовой рамы и прикреплен концами .к каретке, а на гуське тарнирно закреплены кор- пусами другие гидроцилиндры, штоки которых шарнирно прикреплены к одной стороне .рамки, несущей дополнительные блоки, в которые запасован грузовой канат для регулирования положения груэозахвата относительно каретки, Q
у//
1928
другая сторона рамки шарнирно закреплена на гуське.
2, Транспортное средство по п. 1, отличающееся тем, что дополнительный захват выполнен с зажимными рычагами, закрепленными на боковых частях грузовой рамы шарнир- но с возможностью их поворота в поперечной вертикальной плоскйсти.
Bifd/
2
25
26
18
1i
19
Фие.З
.
/УХ
хХ/ /у/
Фие.
.
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| . | |||
