Изобретение относится к вьтисли- тельной технике и может быть использовано при проектировании устройств отображения информации,
Цель изобретения - расширение области применения устройства путем обеспечения поворота координат относительно произвольной точки.
На фиг,1 представлена функциональ ная схема устройства; на фиг. 2 - график определения последовательности преобразований координат объекта при повороте системы координат относительно произвольной точки.
Устройство содержит блок I управления, nepBbirfi 2 и второй 3 блоки деления, п ервый 4 и второй 5 блоки регистров, счетчик 6, сумматор 7, . мультиплексор 8, первый регистр 9, блок 10 постоянной памяти, триггер II, блок 12 коммутации, с второго по седьмой регистры 13-18.
Устройство работает следующим образом.
Поворот системы координат объекта относительно произвольной точки Т (р Ур) выполняется как посйедова- тельность трех преобразований, предтавленных на фиг,2; перенос объекта при котором точка Т перемещается в начало координат; при этом приведенные координаты объекта определяются выражениями:
tx X - х.;
y y-y j (1)
поворот объекта относительно начала лкоординат на угол :
X f(x, 3, с/);
Г
IY
Y ЧС, у, с/).
(2)
перенос повернутого объекта обратным сдвиг ом:
X X + X
F
(3)
Y Y + у р,
где X и Y - определяемые координаты.
Поворот системы координат ХОУ в декартовой плоскости относительно центра вращения, совпадающего с началом координат, на угол о( осуществляется известным образом.
Работа устройства осуществляется последовательно в соотве тствии с пре- образованиями г (I),(2),(3).
Сигнал запуска, поступающий на вход блока 1 управления и регистры
5
0
5
0
0
5
0
5
17, 18 и 15, производит запись в регистры соответствующих кодов текущих координат (х,у), центра вращения (хр, Ур) и угла поворота j( и запус- кает блок 1 управления, который осуществляет сброс сумматора 7,ввод абсциссы текущей координаты х и обратного кода абсциссы центра враще- ния Хр в сумматор 7. Результат суммирования заносится в регистр 9 приведенной абсциссы X, Аналогично определяется приведенная ордината у, которая помещается в регистр 16.
Реализация преобразования (2) начинается с установки в нулевое состояние счетчика 6 и триггера 11 (выходное состояние О определяет косинусную составляющую).
Производится занесение кода приведенной абсциссы X (ординаты у) из регистра 9(16) в блок 2 (З) деления. Путем сдвига кода на определенное число разрядов осуществляется деление кодов в бликах 2 и 3 деления
на 2, 4, 8, 16 и т.д. в зависимости от заданной точности. Результат деления после каждого сдвига запоминается в блоках 4 и 5 регистров. Счетчик 6 под действием единичных импульсов, формируемых в процессе сдвига кодов приведенньк абсциссы и ординаты, образует код адреса соответствующего регистра в блоках 4 и 5 регистров. При равенстве кода числа, записанного в счетчике 6, числу регистров блока 4 (5) счетчик 6 формирует сигнал признака последнего регистра, который поступает в блок 1 управления,
Информационные сигналы, соответствующие прямым и обратным значениям сдвинутых кодов приведенных абсциссы и ординаты, поступают в блок 2 коммутации, который осуществляет передачу информационных сигналов с выходов блоков 4 и 5 на вход мультиплексора 8 в зависимости от управляющих сигналов, формируемых триггером 1 (косинусная или синусная составляющая), и сигнала с блока 1 управления (флаг Х/У), определяющего вычисляемую устройством абсциссу
X или ординату. У. При вычислении / абсциссы X синусная составляющая с
блока 5 регистров поступает через блок 12 коммутации на мультиплексор 8 инвертированной.
В зависимости от кода угла, поступающего с регистра 15 на вход блока 10 постоянной памяти, кода слагаемого алгебраической суммы, формируемого блоком 1 управления, и сигнала с триггера 11, определяющего косинусную составляющую с выхода блока 10 постоянной памяти, кодовый сигнал подается на вход мультиплексора 8. По этому сигналу осуществляется выбор адресов слагаемых, поступающих на соответствующий вход мультиплексора 8, с выхода которого коды слагаемых поступают на вход сумматора 7, который производит сложение косинусной и синусной составляющих для определения абсциссы X повернутой на угол rf приведенной координаты х. После вычисления абсциссы X, значение которой находится в сумматоре 7, и в соответствии с преобразованием (З) блок 1 управления осуществляет ввод абсциссы центра вращения х р в сумматор 7, Определяемая абсцисса X зано- сится в регистр 14, после чего начинается процесс вычисления ординаты Y Процесс определения координат после поворота текущей координаты относительно производной точки завершается занесением ординаты Y в регистр 13,
Таким образом, изобретение обеспечивает поворот системы координат как относительно начала координат, так и относительно произвольной точки математического поля координат экрана.
Формула изобретения
Устройство для поворота системы координат, содержащее блок управления, первый и второй блоки деления, первый и второй блоки регистров,счетчик, сумматор, мультиплексор, блок постоянной памяти, блок коммутации, первый, второй, третий и четвертый регистры, триггер, вход установки 1 которого подключен к первому выходу блока управления, второй выход которого подключен к первому адресному входу блока постоянной памяти, второй адресный вход которого, первый управляющий вход блока коммутации и первый вход выбора типа функций блока управления -подключены к выходу триггера, вход установки О которого и вход сброса счетчика соединены с третьим выходом
0
5
5
блока управления, четвертый выход которого подключен к тактовому входу счетчика, вьгход переполнения которого соединен с вторым входом выбора типа функций блока управления, пятый выход которого подключен к входам управления записью первого и второго блоков регистров, адресные входы которых соединены с выходами счетчика, иестой и седьмой выходы блока управления подключены соответственно к входам управления записью второго и третьего регистров, информационные входы которых соединены с выходом сумматора, вход управления записью которого подключен к восьмому выходу блока управления, девятый выход которого соединен с вторым управляющим входом блока коммутации, первый и второй информационные входы которого подключены к выходам соответственно первого и второго блоков регистров., информационные входы которых соединены соответственно с выходами первого и второго блоков деления, входы управления записью которых подключены к десятому выходу блока управления, одиннадцатый вьгход которого соединен с входами сдвига первого и второго блоков деления, выход четвертого регистра подключен к третьему адресному входу блока постоянной памяти, выход которого соединен с адресным входом мультиплексора, первый информационный вход которого подключен к выходу блока коммутации, второй информационный вход мультиплексора является информационным входом логического О, третий информационный вход мультиплексора и информационный вход второго блока деления подключены к выходу пятого регистра, вьгход первого регистра соединен с информационным входом первого блока деления и с четвертым информационным входом мультиплексора, выход которого подключен к первому информационному входу сумматора,вход управления записью четвертого регистра и вход запуска блока управления являются управляущим входом устройства, первым информационным входом которого является информационный вход 5 четвертого регистра, выходы второго и третьего регистров являются выходами координат устройства, отличающееся тем, что, с целью расширения области применения устрой0
5
0
5
0
5,
ства путем обеспечения поворота координатной сетки относительно произвольной точки, оно содержит шестой и седьмой регистры, выходы которых подключены соответственно к второму и третьему информационным входам сумматора, выход которого соединен с информационными входами первого и пято44Д876
го регистров, входы управления записью которых подключены соответственно к двенадцатому и тринадцатому
- (. выходам блока управления, информаци-- онные входы шестого и седьмого регистров являются соответственно вторым и третьим информационными входами устройства.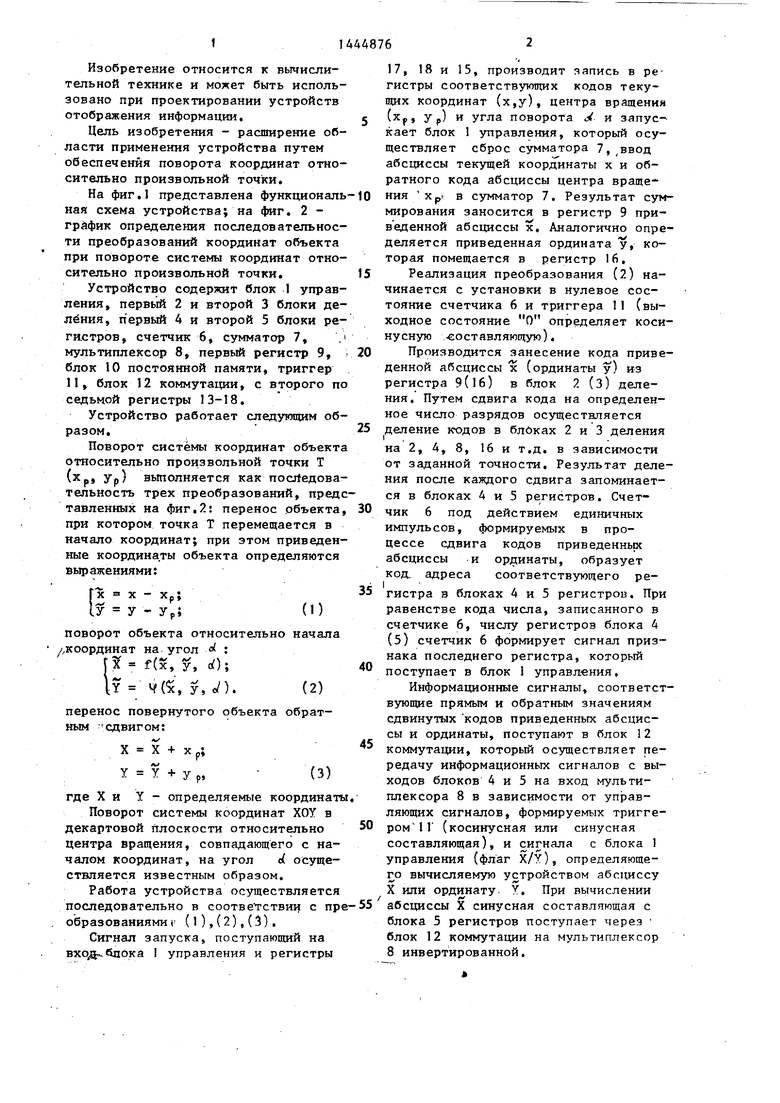

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поворота системы координат | 1984 |
|
SU1259329A1 |
| Устройство для формирования окружностей | 1981 |
|
SU991486A1 |
| Устройство для формирования окружностей | 1983 |
|
SU1096688A2 |
| Устройство для преобразования координат | 1985 |
|
SU1254475A1 |
| Устройство для формирования растрового изображения кривых | 1986 |
|
SU1446646A1 |
| Устройство для вычисления модуля и аргумента вектора | 1985 |
|
SU1249510A1 |
| Функциональный преобразователь | 1985 |
|
SU1249547A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Устройство для формирования окружностей | 1984 |
|
SU1221678A2 |
| Буферное запоминающее устройство для блоков отображения информации | 1986 |
|
SU1411830A1 |
Изобретение относится к вычислительной технике и может быть использовано при проектировании устройств отображения информации. Цель изобретения - расширение области применения устройства путем обеспечения поворота координатной сетки относительно произвольной точки. Устройство содержит блок 1 управления, первый 2 и второй 3 блоки деления, первый 4 и второй 5 блоки регистров, счетчик 6, сумматор 7, мультиплексор 8, первый 9, второй 13, третий 14, четвертый 15, пятый 16, шестой 17 и седьмой 18 регистры, блок 10 постоянной памяти, триггер 11, блок 12 коммутации с со- ответствунхдими связями. По сигналу запуска в регистры 15, 17, 18 заносятся коды текущих координат точки, центра вращения и угла поворота, и блок I управления формирует сигнал записи вычисленных сумматором 7 приведенных кодов абсциссы в регистр 9 и ординаты в регистр 16. На выходе блока 10 постоянной памяти формируется значение синусной и косинусной составляющих, которые поступают через мультиплексор 8 на сумматор 7, где и вычисляются преобразованные значения координат точки, которые записываются в регистры 13, 14 и поступают на выход устройства. 2 ил. (Л 42 4 00
Alx.li}
7
. v ь t
(х.у)
л
Физ.1
| Устройство для формирования окружностей | 1981 |
|
SU991486A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Устройство для поворота системы координат | 1984 |
|
SU1259329A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
