Известны грузовые приводы автоматически управляемых разъединителей и отделителей.
Однако указанные приводы конструктивно сложны.
Предлагаемый привод указанного недостатка не имеет. Это достигается выполнением привода с применением диска, вращаемого под действием тяжения груза и соединенного с валом приводимого в действие аппарата.
Вращение диска при высвобождении электромагнитным соленоидом упорного ролика вызывает поворот вала аппарата навключение или отключение с помощью эксцентричной тяги, связанной с указанным диском.
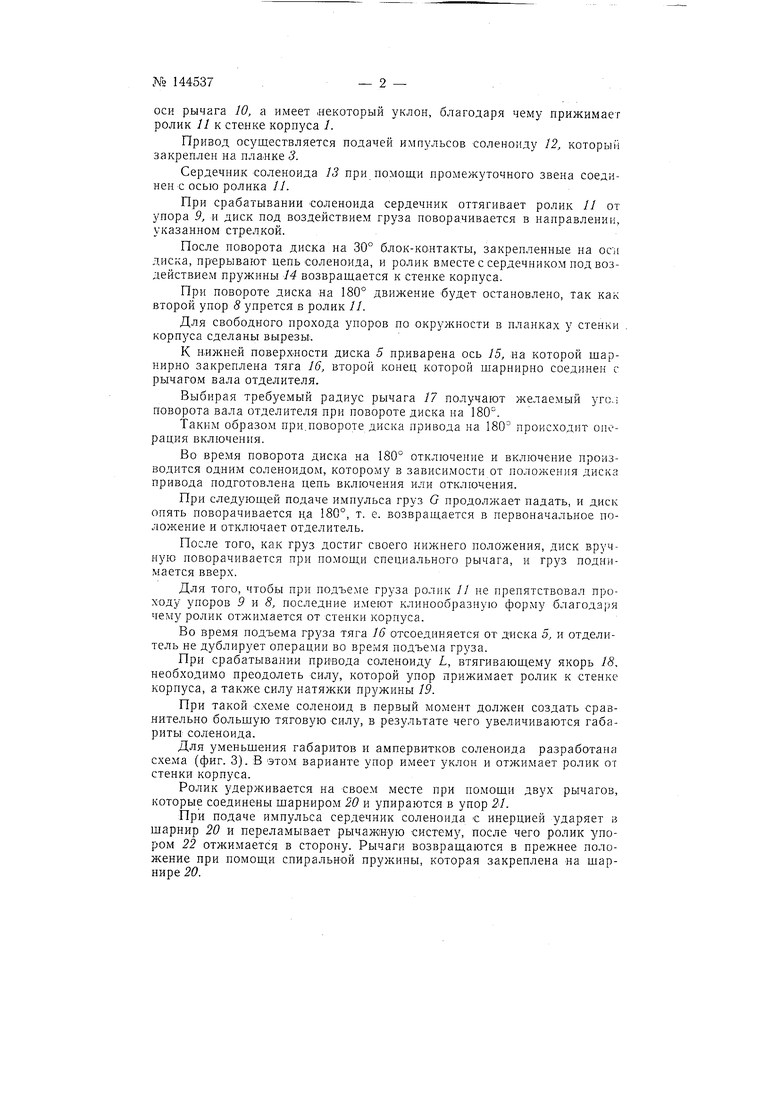
На фиг. 1 схематически изображен предлагаемый привод; на фиг. 2 и 3 изображена кинематическая схема привода.
Привод состоит из цилиндрического корпуса 1, к которому приварены три планки 2, 3, 4, в центре которых находится приваренный к планкам подшипник.
В подщипник снизу вставляется ось, на которой жестко закреплен диск 5. Ось в подщипнике удерживается шплинтом и шайбой 6.
Диск 5 имеет выемку, в которую закладывается трос. Один конец троса жестко закреплен на диске, а второй конец переброшен через ролик 7 и на конце троса подвешен груз G. К диску приварены два упора 8 и 9.
Врашению диска под воздействием груза препятствует рычаг 10, который шарнирно закреплен на планке 2. Конец рычага имеет форму вилки, в которой закреплен на оси ролик /У, который упирается в упор 9 и не позволяет диску вращаться. Плоскость упора 9 не перпендикулярна
jVb 144537
оси рычага 10, а имеет (Некоторый уклон, благодаря чему прижимает ролик 11 к стенке корпуса /.
Привод осуществляется подачей импульсов соленоиду 12, который закреплен на пла«ке 3.
Сердечник соленоида 13 при помощи промежуточного звена соединен с осью ролика 11.
При срабатывании соленоида сердечник оттягивает ролик // от упора 9, и диск под воздействием груза поворачивается в направлении, указанном стрелкой.
После поворота диска на 30° блок-контакты, закрепленные на оси диска, прерывают пепь соленоида, и ролик вместе с сердечником под воздействием пружины 14 возвращается к стенке корпуса.
При повороте диска на 180° движение будет остановлено, так как второй упор 8 упрется в ролик 11.
Для свободного прохода упоров по окрул ности в планках у стенки корпуса сделаны вырезы.
К нижней поверхности диска 5 приварена ось 15, на которой щарнирно закреплена тяга 16, второй конец которой шарнирно соедииен с рычагом вала отделителя.
Выбирая требуемый радиус рычага 17 получают желаемый угол поворота вала отделителя при повороте диска на 180.
Таким образом при.повороте диска привода на 180 происходит операция включения.
Во время поворота диска на 180° отключение и включение производится одним соленоидом, которому в зависимости от положения диска привода подготовлена цепь включения или отключения.
При следующей подаче импульса груз G продолжает падать, и диск опять поворачивается н,а 180°, т. е. возвращается в первоначальное положение и отключает отделитель.
После того, как груз достиг своего нижнего положения, диск вручную поворачивается при помощи специального рычага, и груз поднимается вверх.
Для того, чтобы при подъеме груза ролик // не препятствовал проходу упоров 9 и 8, последние имеют клинообразную форму благодаря чему ролик отжимается от стенки корпуса.
Во время подъема груза тяга J6 отсоединяется от диска 5, и отделитель не дублирует операции во время подъема груза.
При срабатывании привода соленоиду L, втягивающему якорь 18, необходимо преодолеть силу, которой упор прижимает ролик к стенке корпуса, а также силу натяжки пружины 19.
При такой схеме соленоид в первый момент должен создать сравнительно больщую тяговую силу, в результате чего увеличиваются габариты соленоида.
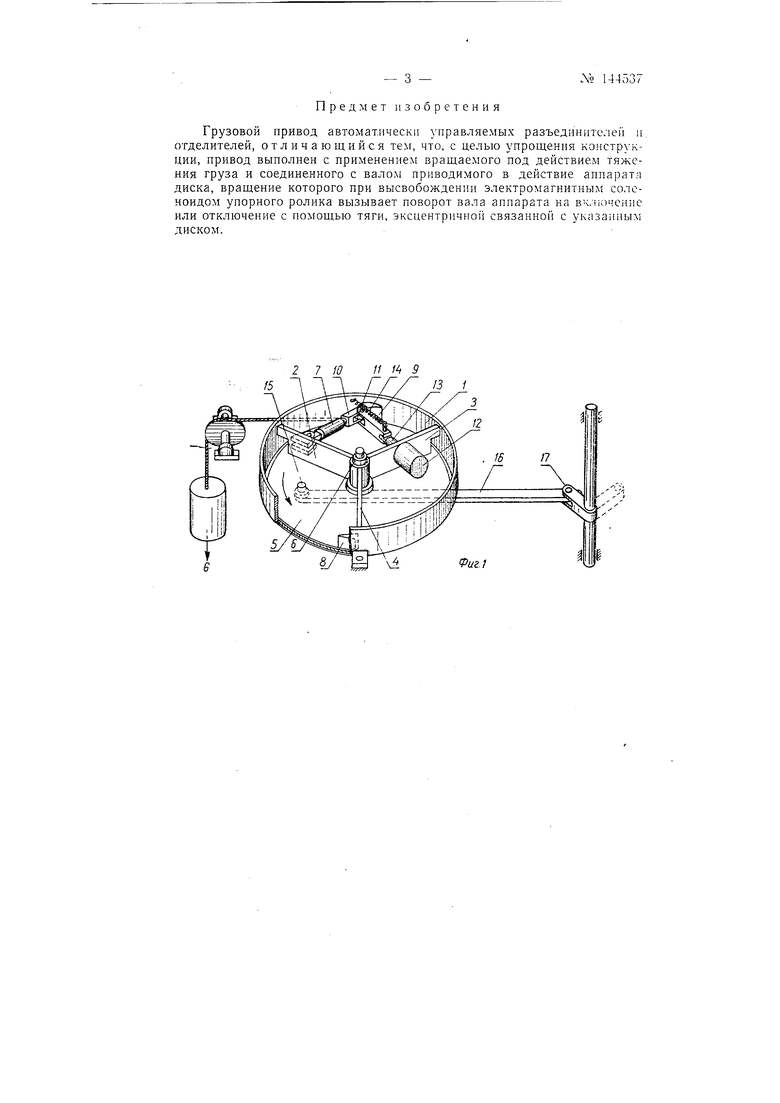
Для уменьщения габаритов и ампервитков соленоида разработана схема (фиг. 3). В этом варианте упор имеет уклон и отжимает ролик от стенки корпуса.
Ролик удерживается на своем месте при помощи двух рычагов, которые соединены щарниром 20 и упираются в упор .
При подаче импульса сердечник соленоида с инерцией ударяет в шарнир 20 и переламывает рычажную систему, после чего ролик упором 22 отжимается в сторону. Рычаги возвращаются в прежнее положение при помощи спиральной пружипы, которая закреплена на шарнире 20.
Предмет изобретения
Грузовой привод автоматически управляемых разъедипитслеи и отделителей, отличающийся тем, что, с целью упрощения конструкции, привод выполнен с применением вращаемого под действием тяжения груза и соединенного с валом приводимого в действие аппарата диска, вращение которого при высвобождении электромагнитным соленоидом упорного ролика вызывает поворот вала аппарата на включение или отключение с помощью тяги, эксцентричной связанной с указанным диском.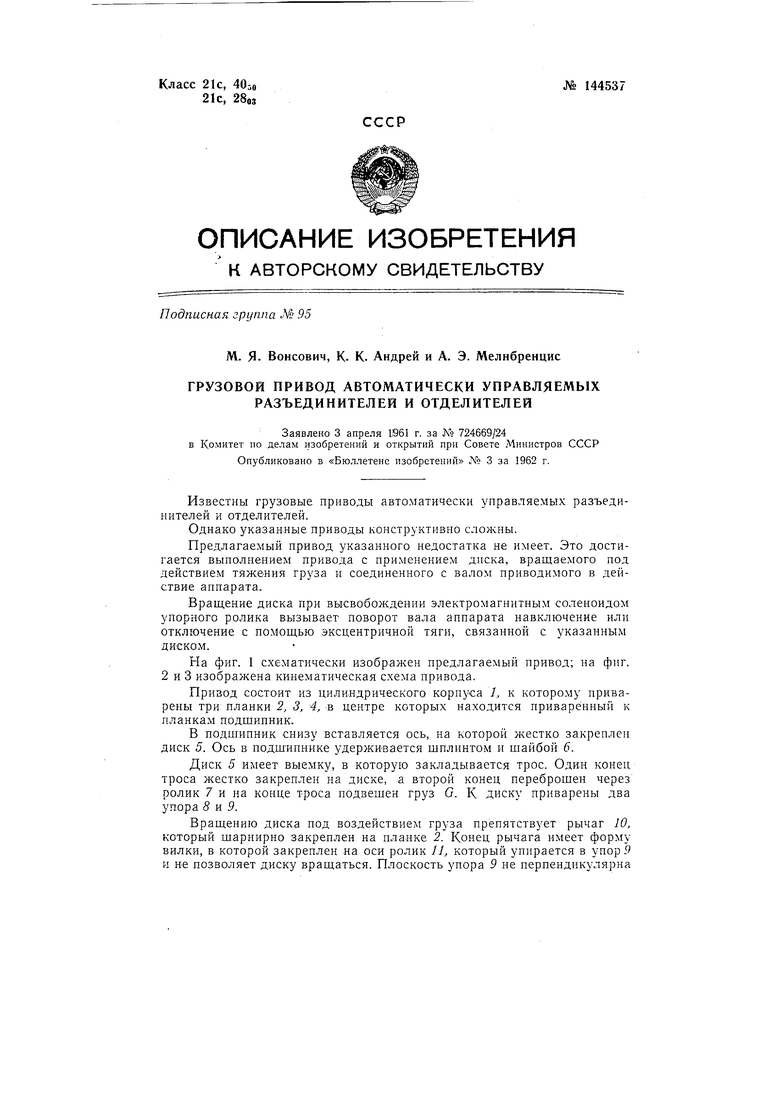
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для съема бобин на ватерах | 1934 |
|
SU44470A1 |
| Устройство для свободного расцепления электрического выключателя, имеющего грузовой или пружинный привод | 1952 |
|
SU100218A1 |
| Машина для предварительной мойки загрязненной посуды | 1958 |
|
SU117558A1 |
| Автомат для группирования и установки бутылок в стандартные ящики с перегородками | 1957 |
|
SU112199A1 |
| Устройство для смены бобин на ватерах | 1932 |
|
SU36877A1 |
| Устройство для тренировки штангистов | 1980 |
|
SU919687A1 |
| Устройство для транспортирования и подключения электроэлементов к измерительной аппаратуре | 1973 |
|
SU498230A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Автомат для упаковки катушек с нитками в пачки | 1958 |
|
SU118015A1 |
| Автоматический ткацкий станок | 1988 |
|
SU1606545A1 |
2 7 10
/5
ft /4 9
Фиг.З
L 200
Фиа2
1-1200
