/ ///У/УХХ/ / ХХ// / ХХ/ /Х//Х/ Х/Х/ /
Изобретение относится к машиностроению и может быть использовано в качестве захватного устройства роботов, манипуляторов и устройств транс портирования.
Цель изобретения - улучшение эксплуатационных качеств путем увеличения диапазона линейных и угловых перемещения присоски.
На чертеже изображен вакуумный захват, общий вид.
Вакуумный захват имеет упругий гофрированный сильфон 1, торец которого закреплен на корпусе 2 с каме- рой, сообщеннной с системой пониженного давления. В сильфон 1 коаксиль- но установлен дополнительньй упругий сильфон 3 меньшего диаметра. Между внутренней поверхностью сильфона 1 и наружной поверхностью сильфона 3 имеется зазор, гарантирующий отсутствие их соприкосновения при угловьт перемещениях. Свободный торец сильфона 1 и торец сильфона 3 соединены герметично посредством кольца 4. Кольцо фиксирует их каокскльное расположение. Свободный торец сильфона соединен с помощью переходной трубки 5 с основанием эластичного наконечни
tea 6.
При сближении поверхностей эластичного наконечника 6 и объекта 7 за счет перемещения корпуса 2 в направлении стрелок А его часть контура сопрягается с поверхностью объекта 7 и деформируется. Наконечник 6 разво- рачивартся в направлении угла ct с неравномерной деформацией стенок и осей сильфона 1 и 3. Разность давле- НИИ атмосферного и в камере корпуса 2 приводит к сопряжению всей поверхности контура наконечника 6 с поверхностью захватьшаемого объекта 7. Снижение давления в камере корпуса 2 обеспечено соединением ее с системой пониженного давления. Увеличение разности давлений повысит усилие захват и соответственно деформацию эластичного наконечника 6, которьй переме- щается в направлении к корпусу 2 за счет деформации сжатия сильфона 1 и растяжения сильфона 3, Диапазон линейных перемещений объекта 7 определяет сумма деформаций сильфонов. При отрьюе объекта 7 от базирующего основания угловое перемещение наконечника 6 уменьшается, при этом имеет место составляющая поперечных перемещений наконечника в направлении стрелок В. Величину перемещений определяет и разность давлений атмосферного и пониженного в камере корпуса 2. В случае, когда жесткости сильфонов прямо пропорциональны их эффективному сечению, величины перемещений этих трубок одинаковы. При снижении разности давлений упругие силы возвращают в исходное состояние сильфон 1 с увеличением его осевой длины, а сильфон 3 - с уменьшением. При этом захватьгааемый объект 7 опирается на базирующее основание с поворотом наконечника 6 под действием момента относительно точки касания. При давлении в камере корпуса 2, равном атмосферному, происходит отделение замкнутого контура эластичного наконечника 6 от захватываемой поверхности объекта 7. Наконечник 6 удаляют от объекта 7 в направлении корпуса 2. Оси сильфонов 1 и 3 выравниваются, а наконечник 6 занимает исходное положение.
Формула изобретения
Вакуумньй захват, содержащий зак- репленньй на корпусе вертикапьно упругий сильфон и эласт ичную присоску, полость которой соединена через полость сильфона с источником вакуума, отличающийся тем, что, с целью улучшения эксплуатационных качеств путем увеличения диапазона линейных и угловых перемещений присоски он снабжен дополнительным упругим сильфоном, установленным соосно внутри полости первого сильфона, и установленной соосно в полости дополнительного сильфона трубкой с буртом, соединенным с верхним концом допол- нительного сильфона, при этом нижние концы сильфонов жестко соединены между собой, а эластичная присоска закреплена на нижнем конце трубки.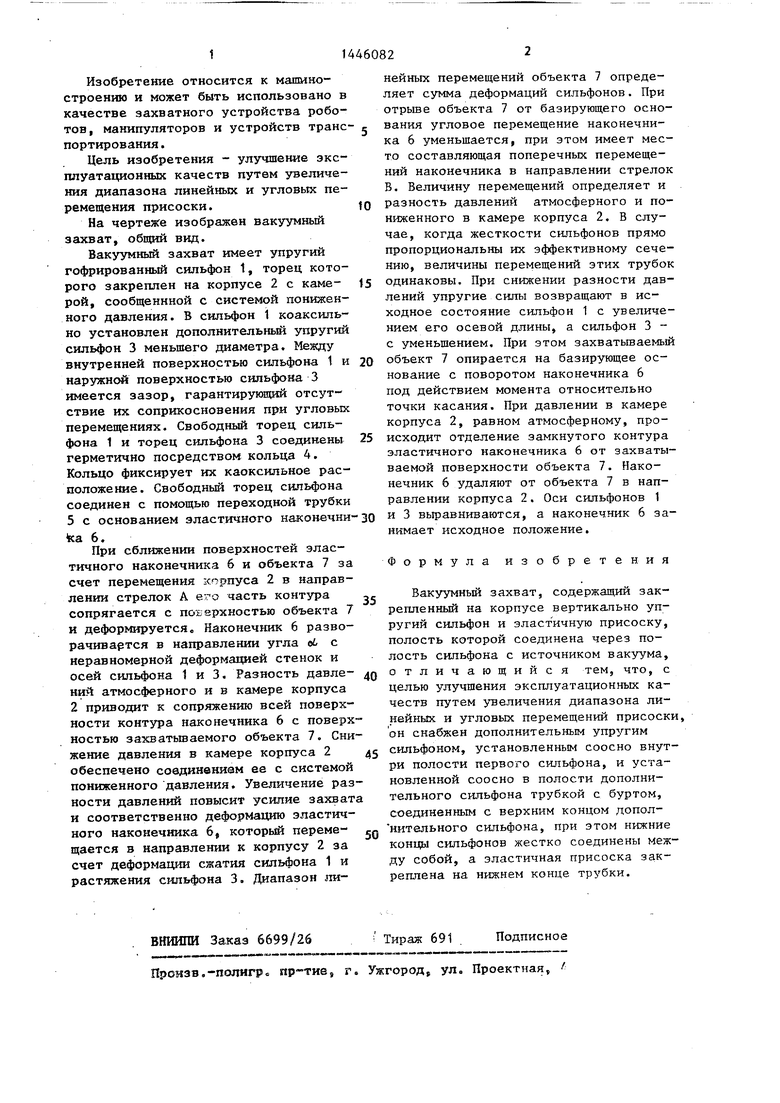
| название | год | авторы | номер документа |
|---|---|---|---|
| ДОИЛЬНЫЙ СТАКАН | 1994 |
|
RU2113112C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2043193C1 |
| ПНЕВМОПИНЦЕТ (ВАРИАНТЫ) И СПОСОБ ВЗЯТИЯ И РАЗМЕЩЕНИЯ КОНТАКТНЫХ ЛИНЗ ИЛИ ДРУГИХ АНАЛОГИЧНЫХ ЭЛЕМЕНТОВ НА ОБЪЕКТАХ ЭТИМ ПНЕВМОПИНЦЕТОМ (ВАРИАНТЫ) | 1998 |
|
RU2200517C2 |
| ЛОЖЕМЕНТНАЯ ОПОРА ДЛЯ ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ НЕЖЕСТКИХ И НЕВИБРОСТОЙКИХ ГРУЗОВ | 2005 |
|
RU2353850C2 |
| Устройство для поштучного отделения плоских заготовок от стопы | 1988 |
|
SU1569062A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ В РАЗБРЫЗГИВАТЕЛЬ ЖИДКОГО ПОКРЫВАЮЩЕГО ПРОДУКТА | 2014 |
|
RU2678152C2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| УЛЕЙ | 1993 |
|
RU2056746C1 |
| Вакуумный захват | 1988 |
|
SU1509319A2 |
Изобретение отнгосится к машиностроению и является элементом взаимодействия средств актоматизации роботов, манипуляторов и устройств транспортирования с рабочим объектом. Цель изобретения - увеличение диапазонов линейных и угловых перемещений с сохранением габаритов захвата. Захват содержит два коаксильно с зазором расположенных упругих сильфона 1 и 3, соединенных по торцу с одной стороны кольцом. Другим торцом сильфон большего диаметра закреплен на корпусе 2 с камерой, сообщенной с системой пониженного давления, а торец трубки сильфона 3 соединен с основанием эластичного наконечника 6. Под воздействием разности давлений атмосферного и в камере корпуса при перекрытии отверстия контура поверхностью объекта один сильфон сжимается, а другой - растягивается. 1 ил. 
| Акцептованная заявка Великобритании № 1308796, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
