Изобретение относится к конструкции захватных устройств для отделения и поштучного переноса листов и подобных плоских заготовок от стопы и является усовершенствованием изобретения по авт. св. ( 1235802.
Целью изобретения является повышение надежности работы вакуумного захвата.
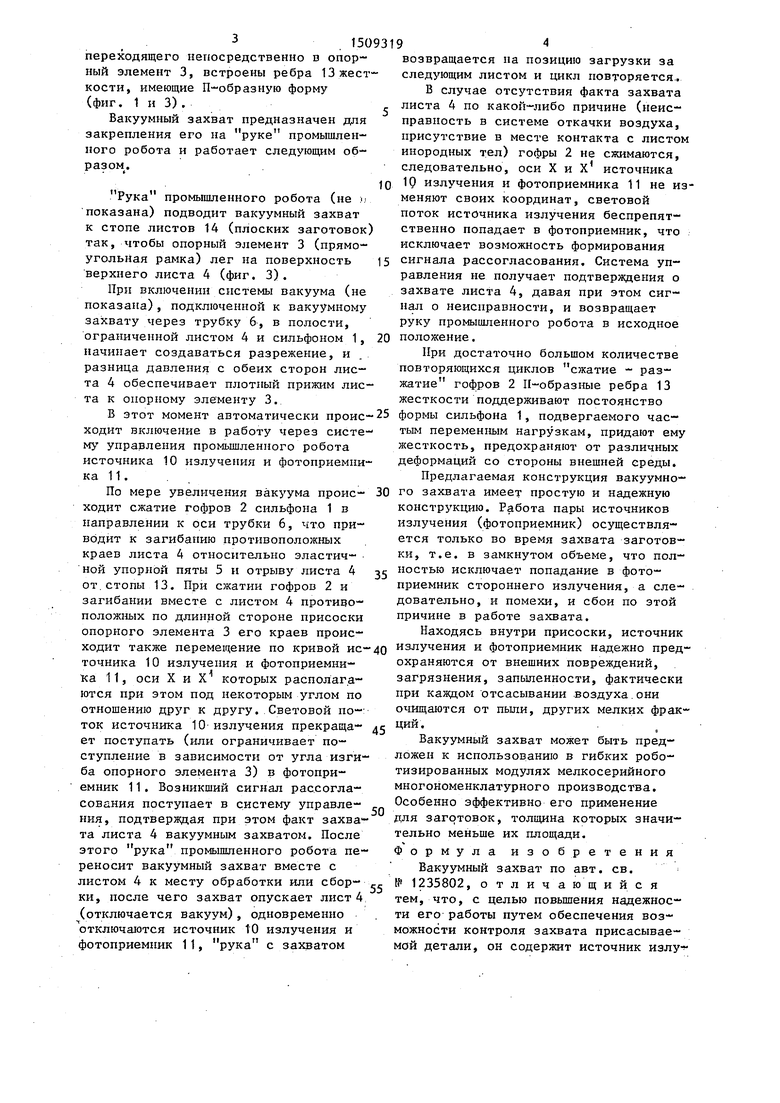
На фиг. 1 изображен вакуумный захват, общий вид, с частичным поперечным разрезом; на фиг. 2 - то же, вид сверху с частичныь-т вырывамн; на фиг. 3 - захват в момент отрьша лис- та от стопы.
Вакуумный захват состоит из сильфона 1 с гофрами 2, жестко связанного с его основанием упругого опорного элемента 3 в виде прямоугольной рам-.- ки, предназначенной для контактирова- |Ния с присасываемой деталью 4, а так- ,же установленной в полости сильфона
упорной пяты 5, которая размещена на нижнем конце трубки 6 и расположена на уровне нижней плоскости опорного элемента 3. Трубка 6 на участке между пятой 5 и местом крепления на ней посредством шайб 7 и гаек 8 сильфона 1 имеет отверстия 9 для сообщения полости сильфона 1 с источником вакуума (не показан). Захват имеет также размещенные в полости сильфона 1 источник 10 излучения и фотоприемник 11, которые установлены в выполненных в основании сильфона 1 гнездах 12. Источник 10 излучения и фотоприемник 11 через основание сильфона 1 жестко связаны с противоположными сторонами опорного элемента 2, параллельными гофрам 2 сильфона 1 и ориентированы таким образом, что их оси X и X совпадают в исходном положении опорного элемента 3. Во внутренние полости гофров 2, за исключением нижнего.
о со
со
ГЧ)
переходящего непосредственно в опорный элемент 3, встроены ребра 13 жесткости, имеющие П-образную форму (фнг. 1 и 3).
Вакуумный захват предназначен для закрепления его на руке промышленного робота и работает следующим образом.
JQ 19 излучения и фотоприемника 11 не из меняют своих координат, световой поток источника излучения беспрепятственно попадает в фотоприемник, что исключает возможность формирования
15 сигнала рассогласования. Система управления не получает подтверждения о захвате листа 4, давая при этом сигнал о неисправности, и возвращает руку промышленного робота в исходное положение,
При достаточно большом количестве
Рука промышленного робота (не показана) подводит вакуумный захват к стопе листов 14 (плоских заготовок) так, чтобы опорный элемент 3 (прямоугольная рамка) лег на поверхность верхнего листа 4 (фиг. 3).
При включении системы вакуума (не показана), подключенной к вакуумному захвату через трубку 6, в полости, ограниченной листом 4 и сильфоном 1, начинает создаваться разрежение, и разница давления с обеих сторон листа 4 обеспечивает плотный прижим листа к опорному элементу 3.
В этот момент автоматически проис-25 формы сильфона 1, подвергаемого час- ходит включение в работу через систе- тым переменным нагрузкам, придают ему
20
повторяющихся циклов сжатие - разжатие гофров 2 П-образные ребра 13 жесткости поддерживают постоянство
возвращается на позицию загрузки за следующим листом и цикл повторяется., В случае отсутствия факта захвата
листа 4 по какой-либо причине (неисправность в системе откачки воздуха, присутствие в месте контакта с листом инородных тел) гофры 2 не сжимаются, следовательно, оси X и Х источника
19 излучения и фотоприемника 11 не изменяют своих координат, световой поток источника излучения беспрепятственно попадает в фотоприемник, что исключает возможность формирования
сигнала рассогласования. Система управления не получает подтверждения о захвате листа 4, давая при этом сигнал о неисправности, и возвращает руку промышленного робота в исходное положение,
При достаточно большом количестве
повторяющихся циклов сжатие - разжатие гофров 2 П-образные ребра 13 жесткости поддерживают постоянство
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1984 |
|
SU1235802A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Вакуумный захват | 1987 |
|
SU1442400A1 |
| Вакуумный захват | 1990 |
|
SU1771959A1 |
| Вакуумный захват для листовых деталей | 1988 |
|
SU1640084A1 |
| СПОСОБ МАНИПУЛИРОВАНИЯ И РОБОТ, ИСПОЛЬЗУЕМЫЙ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2140849C1 |
| Устройство для массажа вымени животных | 1989 |
|
SU1658932A1 |

Изобретение позволяет повысить надежность работы вакуумных захватов, которые могут использоваться в роботизированных комплексах. Вакуумный захват имеет сильфон, жестко связанный с ним упругий опорный элемент в виде прямоугольной рамки и упорную пяту, расположенную в полости сильфона на уровне нижней поверхности опорного элемента. Кроме того, захват содержит источник излучения и фотоприемник, размещенные в полости сильфона и жестко связанные со сторонами опорного элемента, которые параллельны гофрам сильфона. Фотоприемник и источник излучения расположены так, что их оси совпадают в исходном положении опорного элемента. 3 ил.
му управления промышленного робота источника 10 излучения и фотоприемпи ка 11.
По мере увеличения вакуума проис- ходит сжатие гофров 2 сильфона 1 в направлении к оси трубки 6, что приводит к загибанию ПРОТИВОПОЛОЖНЫХ краев листа 4 относительно эластичной упорной пяты 5 и отрыву листа 4 от.стопы 13. При сжатии гофров 2 и загибании вместе с листом 4 противоположных по длинной стороне присоски опорного элемента 3 его краев происходит также перемещение по кривой ис точника 10 излучения и фотоприемника 11, оси X и Х которых располагаются при этом под некоторым углом по отношению друг к другу. Световой поток источника 10 излучения прекращает поступать (или ограничивает по-
ступление в зависимости от угла изгиба опорного элемента 3) в фотоприемник 11. Возникший сигнал рассогласования поступает в систему управле- ния, подтверлдая при этом факт захвата листа 4 вакуумным захватом. После этого рука промышленного робота переносит вакуумный захват вместе с
листом 4 к месту обработки или сбор- „ № 1235802, отличающийся
ки, после чего захват опускает лист 4 (отключается вакуум), одновременно отключаются источник 10 излучения и фотоприемник 11, рука с захватом
тем, что, с целью повьшения надежно ти его работы путем обеспечения воз можности контроля захвата присасыва мой детали, он содержит источник из
жесткость, предохраняют от различных деформаций со стороны внешней среды.
Предлагаемая конструкция вакуумного захвата имеет простую и надежную конструкцию. Работа пары источников излучения (фотоприемник) осуществляется только во время захвата заготовки, т.е. в замкнутом объеме, что пол35
30
д
ностью исключает попадание в фото- приемник стороннего излучения, а следовательно, и помехи, и сбои по этой причине в работе захвата.
Находясь внутри присоски, источник 40 излучения и фотоприемник надежно предохраняются от внешних повреждений, загрязнения, запыленности, фактически при каждом отсасывании воздуха.они очищаются от пьши, других мелких фракций.
Вакуумный захват может быть предложен к использованию в гибких роботизированных модулях мелкосерийного многономенклатурного производства. Особенно эффективно его применение для заготовок, толщина которых значительно меньше их площади. Формула изобретения
Вакуумный захват по авт. св.
45
тем, что, с целью повьшения надежности его работы путем обеспечения возможности контроля захвата присасываемой детали, он содержит источник излу(b
/
о(
ae.J
fas. 1
.2
| Вакуумный захват | 1984 |
|
SU1235802A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
