Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных роботах.
Цель изобретения - повышение надежности захвата деталей с резкоизменяю- щейся кривизной поверхности.
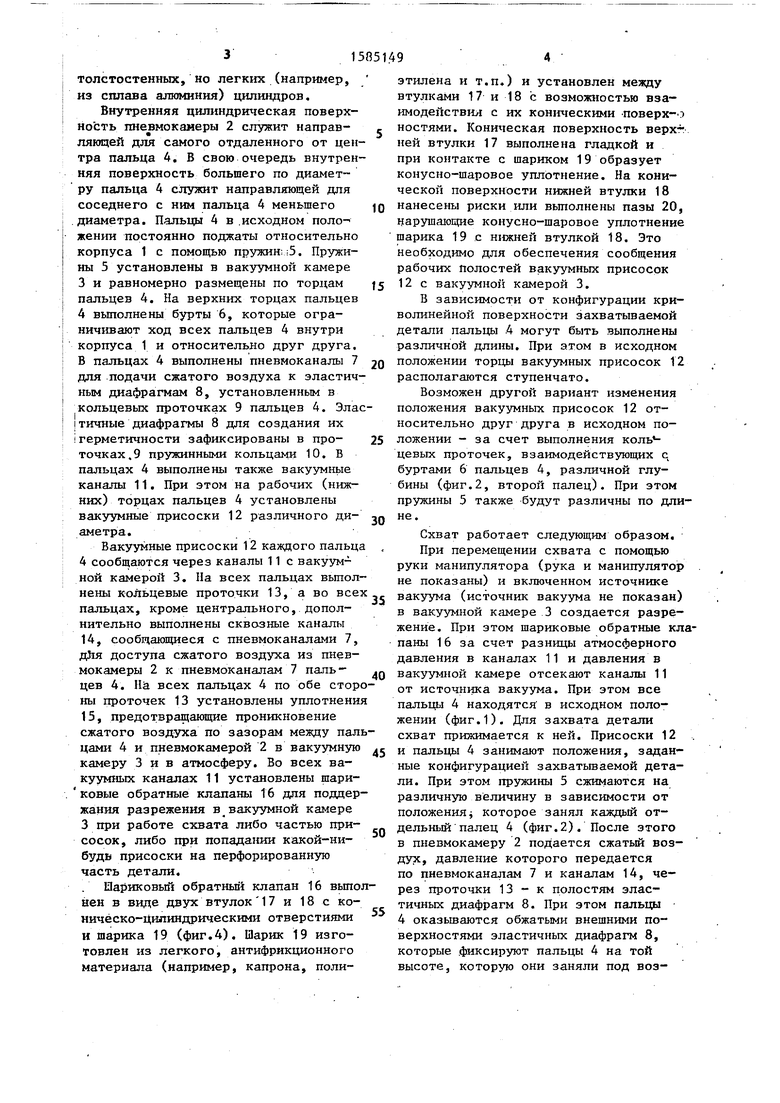
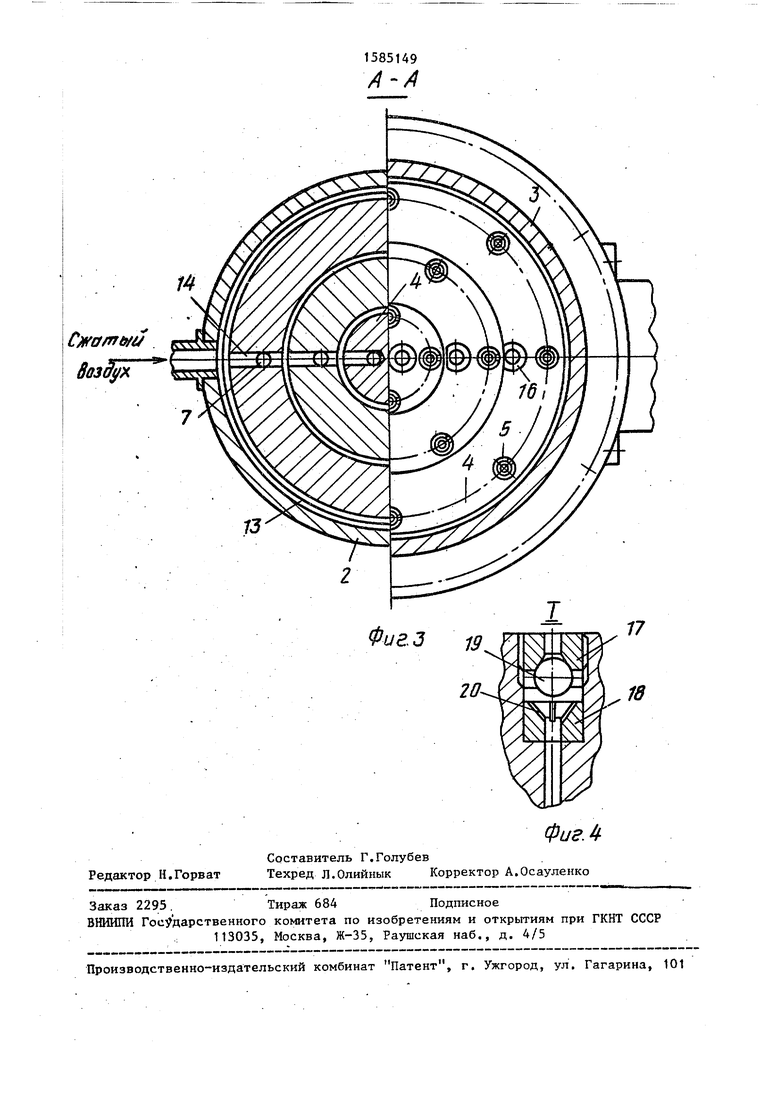
На фиг.1 изображен схват в исходу ном положении; на фиг.2 - схват при захвате детали; на фиг.З - разрез А-А на фиг.1; на фиг.4 - шариковый обратный клапан.
Схват манипулятора содержит корпус 1, неподвижно установленный на
конечном звене манипулятора (не показан) . Корпус 1 снабжен пневмокаме- рой 2 и вакуумной камерой 3, установленной на верхнем торце пневмо- камеры 2. Пневмокамера 2 и вакуумная камера 3 выполнены в форме полых цилиндров и скреплены между собой с помощью фланцевого соединения. В корпусе 1 с возможностью осевого перемещения относительно друг друга установлены пальцы 4. Центральный палец 4 выполнен в виде цилиндра, а периферийные пальцы 4 - в виде полых
ел
00
ел
4ь
СО
31
толстостенных, но легких (например, из сплава алюминия) цилиндров.
Внутренняя цилиндрическая поверхность пневмоканеры 2 служит направляющей для самого отдаленного от центра пальца 4. В свою очередь внутренняя поверхность большего по диаметру пальца 4 служит направляющей для соседнего с ним пальца 4 меньшего диаметра. Пальцы 4 в исходном положении постоянно поджаты относительно корпуса 1 с помощью пружин 5. Пружины 5 установлены в вакуумной камере
3и равномерно размещены по торцам пальцев 4. На верхних торцах пальцев
4выполнены бурты 6, которые ограничивают ход всех пальцев 4 внутри корпуса 1 и относительно друг друга. В пальцах 4 выполнены пневмоканалы 7 для подачи сжатого воздуха к эластичным диафрагмам 8, установленным в кольцевых проточках 9 пальцев 4. Элаiтичные диафрагмы 8 для создания их герметичности зафиксированы в проточках. 9 пружинными кольцами 10. В пальцах 4 выполнены также вакуумные каналы 11. При этом на рабочих (нижних) торцах пальцев 4 установлены вакуумные присоски 12 различного диаметра.
Вакуумные присоски 12 каждого пальц 4 сообщаются через каналы 11 с вакуумной камерой 3. На всех пальцах выполнены кольцевые проточки 13, а во все пальцах, кроме центрального, дополнительно выполнены сквозные каналы
14,сообщающиеся с пневмоканалами 7, для доступа сжатого воздуха из пнев- мокамеры 2 к пневмоканалам 7 пальцев 4. На всех пальцах 4 по обе сторны проточек 13 установлены уплотнени
15,предотвращающие проникновение сжатого воздуха по зазорам между палцами 4 и пневмокамерой 2 в вакуумную камеру 3 и в атмосферу. Во всех вакуумных каналах 11 установлены шари ковые обратные клапаны 16 для поддержания разрежения в вакуумной камере 3 при работе схвата либо частью присосок, либо при попадании какой-нибудь присоски на перфорированную часть детали.
Шариковый обратный клапан 16 выпонен в виде двух втулок 17 и 18 с ко- ническо-цилиндрическими отверстиями и шарика 19 (фиг.4). Шарик 19 изготовлен из легкого, антифрикционного материала (например, капрона, поли
10
5
0
5
этилена и т.п втулками 17 и
0
5
40
45
50
5
) и установлен между 18 с возможностью взаимодействия с их коническими поверх-о ностями. Коническая поверхность верхней втулки 17 выполнена гладкой и при контакте с шариком 19 образует конусно-шаровое уплотнение. На конической поверхности нижней втулки 18 нанесены риски или выполнены пазы 20, нарушающие конусно-шаровое уплотнение шарика 19 с нижней втулкой 18. Это необходимо для обеспечения сообщения рабочих полостей вакуумных присосок 12 с вакуумной камерой 3.
В зависимости от конфигурации криволинейной поверхности захватываемой детали пальцы 4 могут быть выполнены различной длины. При атом в исходном положении торцы вакуумных присосок 12 располагаются ступенчато.
Возможен другой вариант изменения положения вакуумных присосок 12 относительно друг друга в исходном положении - за счет выполнения цевых проточек, взаимодействующих с буртами 6 пальцев 4, различной глубины (фиг.2, второй палец). При этом пружины 5 также будут различны по длине.
Схват работает следующим образом.
При перемещении схвата с помощью руки манипулятора (рука и манипулятор не показаны) и включенном источнике вакуума (источник вакуума не показан) в вакуумной камере 3 создается разрежение. При этом шариковые обратные клапаны 16 за счет разницы атмосферного давления в каналах 11 и давления в вакуумной камере отсекают каналы 11 от источника вакуума. При этом все пальцы 4 находятся в исходном положении (фиг.1). Для захвата детали схват прижимается к ней. Присоски 12 и пальцы 4 занимают положения, заданные конфигурацией захватываемой детали. При этом пружины 5 сжимаются на различную величину в зависимости от положенияj которое занял каждый отдельный палец 4 (фиг.2). После этого в пневмокамеру 2 подается сжатый воздух, давление которого передается по пневмоканалам 7 и каналам 14, через проточки 13 - к полостям эластичных диафрагм 8. При этом пальцы 4 оказываются обжатыми внешними поверхностями эластичных диафрагм 8, которые фиксируют пальцы 4 на той высоте, которую они заняли под воздействием на них захватываемой детали. Пальцы 4 как бы запомнили свое положение„относительно пневмо- камеры 2 и друг друга Это нербходи- мо для того, чтобы вес пальцев 4 и усилия пружин 5 не действовали на захватываемую деталь. В момент опускания схвата на деталь с последующим прижимом присоски 12 деформируются. Воздух из рабочих полостей присосок 12 последовательно (в направлении от центральной к самой отдаленной из периферийных) выжимается в атмосферу через места контакта присосок 12 и детали.
При подъеме схвата за счет упругих сил деформации объемы рабочих полостей присосок 12 увеличиваются и стремятся к первоначальному значению. При увеличении объемов рабочих полостей присосок 12 в них создается разрежение, а тем самым уменьшается разность давлений в вакуумных каналах 11 и вакуумной камере 3. Изменение разности давлений в вакуумных каналах 11 и вакуумной камере 3 в сторону уменьшения снижает и силу прижатия шариков 19 шариковых обратных клапанов 16 к гладким коническим поверхностям верхних втулок 17. При наступлении момента, когда сила прижатия шариков 19 к коническим поверхностям верхних втулок 17 становится меньше силы собственного веса шариков 19, последние отпадают от гладких конических поверхностей и ложатся на конические поверхности нижних втулок 18, на которых выполнены пазы 20 (риски, углубления, шероховатость и т.п.), нарушающие уплотнение шар - конус.
В результате этого рабочие полости присосок 12 через каналы 11, пазы 20, коническо-цилиндрические отверстия верхних втулок 17 шариковых обратных клапанов 16 соединяются с вакуумной камерой 3.
Транспортируемая деталь удерживается одной из присосок 12 силой, создаваемой разностью давлений атмосферного и источника вакуума. При этом присоски 12, расположенные в зоне вакуума с обеих сторон, в работе не участвуют.
При попадании какой-либо присоски 12 на сквозное отверстие в детали (или при работе схвата с деталями малого размера - например, только
центральной лрисоской) шариковые обратные клапаны 16 остаются закрытыми, сохраняя необходимое разрежение в вакуумной камере 3.
Для освобождения детали вакуумную камеру 3 отключают от источника вакуума и открывают в нее доступ атмосферного воздуха. Ыарнки 19 клапанов 16 под действием собственного
веса падают, давление в вакуумной системе становится одинаковым (равным атмосферному). Присоски 12 при этом деформируются, стремясь занять свою
начальную форму.
Одновременно с этим выравнивают с а атмосферным давление и в пневмокаме- ре 2. Эластичные диафрагмы 8 пальцев 4 уменьшают свой поперечный размер до
первоначального, происходит расфик- сация пальцев 4 относительно друг друга и стенки пневмокамеры 2. Пальцы 4 под действием собственного веса и пружин 5 занимают исходное положение,
опираясь при этом на бурты 6. Цикл повторяется.
Схват может быть снабжен пальцами различной длины или пальцы одинаковой длины могут иметь кольцевые проточки, взаимодействующие с выступами пальцев различной глубины. Во втором случае торцы пальцев 4 со стороны вакуумной камеры 3 расположены ступенчато. В обоих случаях в исходном положении рабочие торцы присосок располагаются ступенчато относительно друг друга. При этом разница в расположении торцов присосок может быть задана исходя из конфигурации кон- .
кретной детали, подлежащей захвату.
Формула изобретения
1 Схват манипулятора, содержащий корпус, соосно расположенные в нем подпружиненные центральный и периферийные пальцы с присосками различного диаметра, уплотненные друг относительно друга и корпуса, в центральном пальце выполнены вакуумный канал и канал, соединенный с пневмосисте- мой, отличающийся тем, что, с целью повышения надежности
захвата деталей с резкоизменяющейся кривизной поверхности, в периферийных пальцах вакуумные каналы, в которых расположены шариковые обратные клапаны, в проточках ка внешней поверхности пальцев установлены эластичные диафрагмы, внутренняя полость которых соединена с пневмосистемой каналами, выполненными в пальцах
2. Схват по п.1, отличающийся тем, что торцы пальцев со стороны вакуумной камеры расположены ступенчато.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1977 |
|
SU810479A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1990 |
|
RU2091208C1 |
| Схват манипулятора | 1984 |
|
SU1178588A1 |
| Схват робота | 1987 |
|
SU1502299A1 |
| Вакуумный схват | 1989 |
|
SU1689066A1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| АДАПТИРУЕМЫЙ ГИМНАСТИЧЕСКИЙ НАСТИЛ | 2009 |
|
RU2426572C2 |
| Способ укладки консервных банок в тару и устройство для его осуществления | 1987 |
|
SU1413022A1 |
| Головка манипулятора | 1990 |
|
SU1811485A3 |
| Магнитно-вакуумный захват | 1985 |
|
SU1366396A1 |

Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных роботах. Цель изобретения - повышение надежности захвата деталей с резкоизменяющейся кривизной поверхности. Схват манипулятора содержит корпус, соосно расположенные в нем подпружиненные центральный и периферийные пальцы с присосками различного диаметра, уплотненные относительно друг друга и корпуса. В центральном и периферийных пальцах выполнены вакуумные каналы, в которых расположены шариковые обратные клапаны. В проточках внешней поверхности пальцев установлены эластичные диафрагмы, внутренняя полость которых соединена каналами, выполненными в пальцах с пневмосистемой. В схвате вакуумные каналы, в которых установлены шариковые обратные клапаны, выполнены также в периферийных пальцах. В кольцевых проточках на внешней поверхности каждого пальца установлены эластичные диафрагмы, внутренняя полость которых соединена каналами, выполненными в пальцах, с пневмосистемой. Вариант конструкции схвата предусматривает ступенчатое расположение торцов вакуумных присосок в исходном положении. 1 з.п. ф-лы, 4 ил.
.А Сжатый
Воздух
16 П
10
о
r
1Л
00
in
Сяат&м
8озЗух
13
Редактор Н.Горват
Составитель Г.Голубев
Техред Л.Олийнык Корректор А.Осауленко
18
Фиг Л
| Патент Великобритании № 1193921, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
