Изобретение относится к насосостроению, в частности к системам автоматического управления эрлифтами.
Цель изобретения - повышение надежности и экономичности работы эрлифта путем своевременного предотв э 1- щения образования нробок.
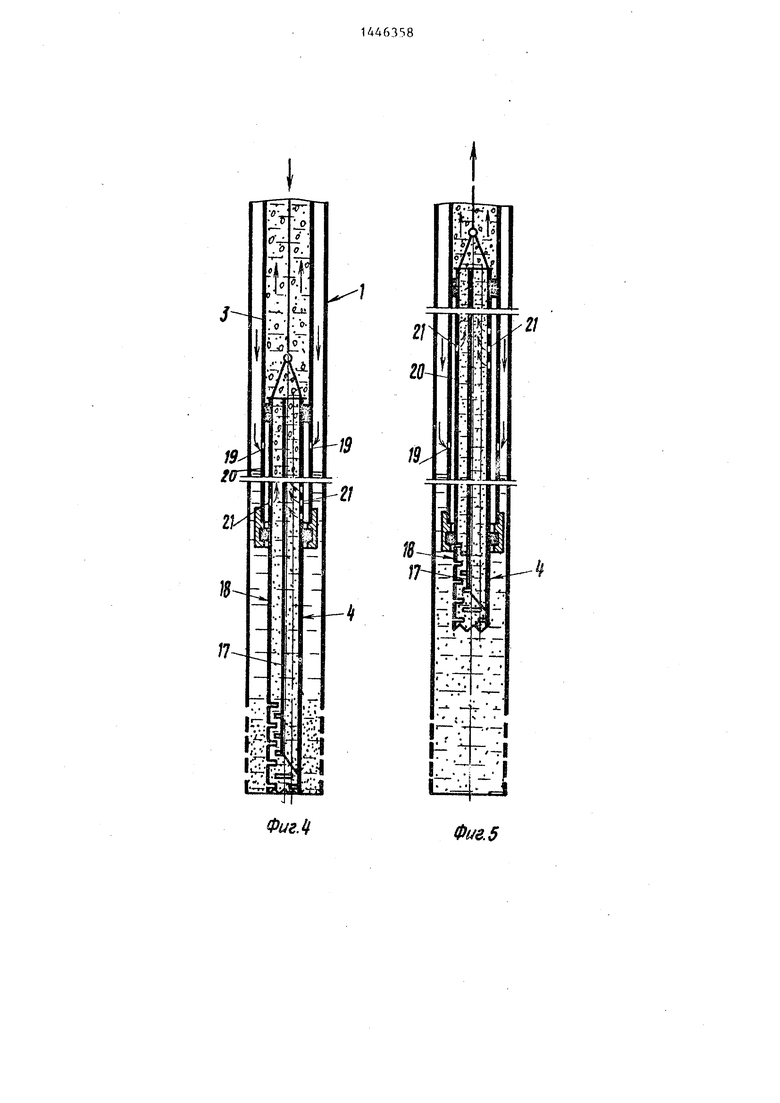
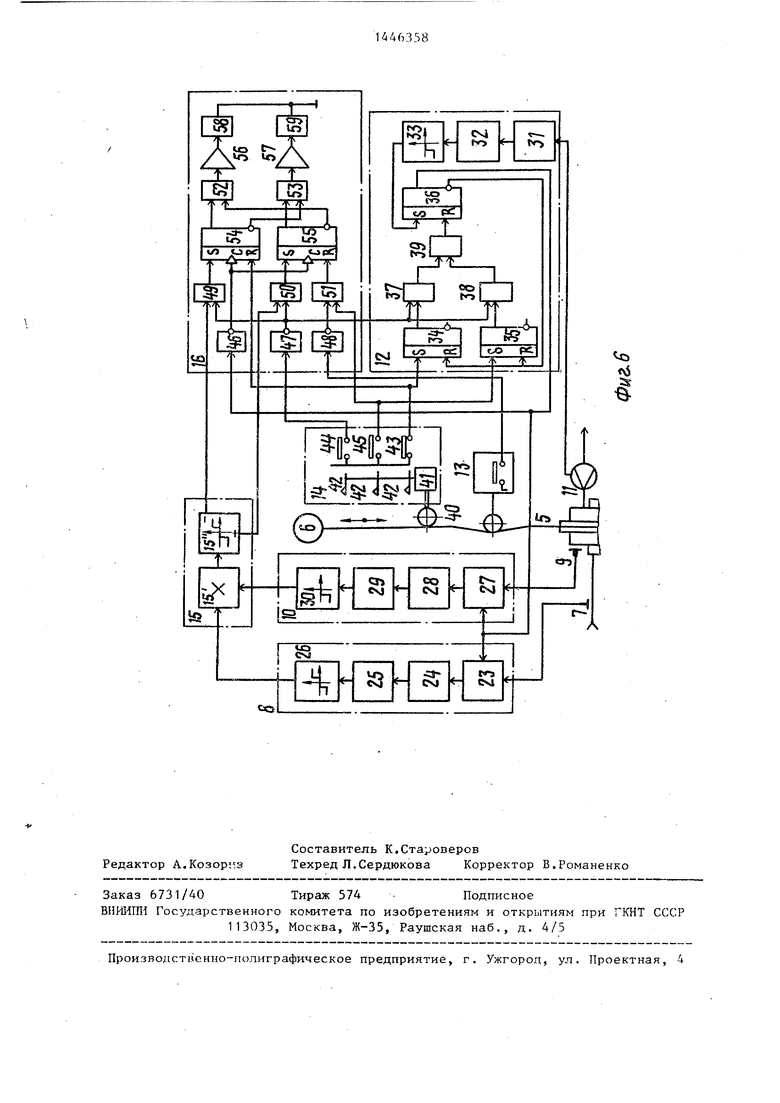
На фиг.1 показана принципиальная схема эрлифта и системы управления; на фиг.2 - сечение А-А на фиг.1 на фиг.З - сечение Б-Б на фиг.1; на фиг.4 и 5 - соответственно крайние нижнее и верхнее положения нижней части .подъемной трубы; на фиг.6 - функциональная схема системы управления,
Эрлифт содержит воздухопровод 1 и концентрично установленную в нем с образованием кольцевого пространства 2 подъемную трубу 3, нижняя часть 4 которой выполнена с возмож- нос.тыо возвратно-поступательного перемещения посредством троса 5, свя
10
15
Блок 8 определения знака (фиг.Ь) содержит последовательно соединенные между собой реле 23, фильтр 24, устройство 25 сравнения и преобразователь 26, при этом контакты реле 23 соединены с датчиком 7 давления, а выход преобразователя 26 подключен к входу множительного устройства схемы 15 знака. Блок 10 определения знака содержит последовательно соединенные между собой реле 27, фильтр 28, устройство 29 сравнения и преобразователь 30.
Блок 12 определения знака содержит фильтр 31, устройство 32 сравнения, преобразователь 33, триггеры
34-36, элементы И 37 и 38 и элемент ИЛИ 39.
2Q Блок 14 задания-контроля перемещения нижней части 4 подъемной трубы 3 содержит мерньш ролик 40, соединенный через редуктор 41 с кулачками 42 контракта 43, фиксирующего занного с приводом 6, датчик 7 давле- 25 крайнее верхнее положение нижней час- ния в кольцевом пространстве 2, блок ти 4, контакта 45, фиксирующего край14/J6358
Блок 8 определения знака (фиг.Ь) содержит последовательно соединенные между собой реле 23, фильтр 24, устройство 25 сравнения и преобразователь 26, при этом контакты реле 23 соединены с датчиком 7 давления, а выход преобразователя 26 подключен к входу множительного устройства схемы 15 знака. Блок 10 определения знака содержит последовательно соединенные между собой реле 27, фильтр 28, устройство 29 сравнения и преобразователь 30.
Блок 12 определения знака содержит фильтр 31, устройство 32 сравнения, преобразователь 33, триггеры
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления газлифтом | 1991 |
|
SU1827440A1 |
| СПОСОБ УПРАВЛЕНИЯ НАСОСНОЙ УСТАНОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2095633C1 |
| Способ управления эрлифтом | 1986 |
|
SU1460434A1 |
| Система автоматического управления укладкой кирпича | 1977 |
|
SU662357A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЯВЛЕНИЯ В РАБОЧЕЙ ЗОНЕ КРАНА ЧЕЛОВЕКА | 2004 |
|
RU2266859C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И КОНТРОЛЯ ТЕМПЕРАТУРЫ ТЕПЛОНОСИТЕЛЯ СУШИЛКИ ЗЕРНА С ТЕПЛОГЕНЕРАТОРОМ, РАБОТАЮЩИМ НА ТВЕРДОМ ТОПЛИВЕ | 1996 |
|
RU2117227C1 |
| Устройство для обработки лещади доменной печи | 1984 |
|
SU1227420A1 |
| Система нейтрализации воды | 1988 |
|
SU1668969A1 |
| Устройство для регулирования уровня стекломассы | 1983 |
|
SU1157027A1 |
| Электропривод | 1987 |
|
SU1494195A1 |
Иэобрете)1ие поз}1оляет ЛОЕИ.ЗСИТЬ надежность и ткономггпюсть работы фиа | J эрлифта путем своевременного предотвращения образования пробок. Воздух подают в нюкнюю часть 4 подъемной трубы 3. Воздухопровод 1 перемещают относительно части 4. Измеряют,давление в воздухопроводе 1, давление и расход смеси на выходе из трубы 3. Сравнивают измеренные параметры с их номинальными значениями, и в зависи- MocTii от сочетания полученных рассогласований определяют режим перемещения части 4. Датшый способ управления позволяет оперативно анализиро- ршть состояние скважины по косвенным показателям процесса и автоматически изменять место впуска воздуха. 6 ил. Ф
8 определения знака отклонения давления в кольцевом пространстве 2, датчик 9 давления на буфере скважины, блок 10 определения знака отклонения ,а,агтпения ла буфере, датчик 11 расход смеси, подклагченньш к блоку 12 определения знака отклонения расхода, датчик 13 натяжения троса 5, блок 1 задания-контроля перемещений нижней части 4 подъемной трубь 3, при этом датчики 7 и 9 давления подключены соответственно к блокам 8 и 10. Блок 12 определания знака отклонения расхода соединен с блоками 8 и 10 определения знака, а схема 15 знака произведения отклоненных давлений состоит из множителыюго устройства 15 и преобразователя 15 . Эрлифт содержит также блок 16 у 1равления приводом 6,
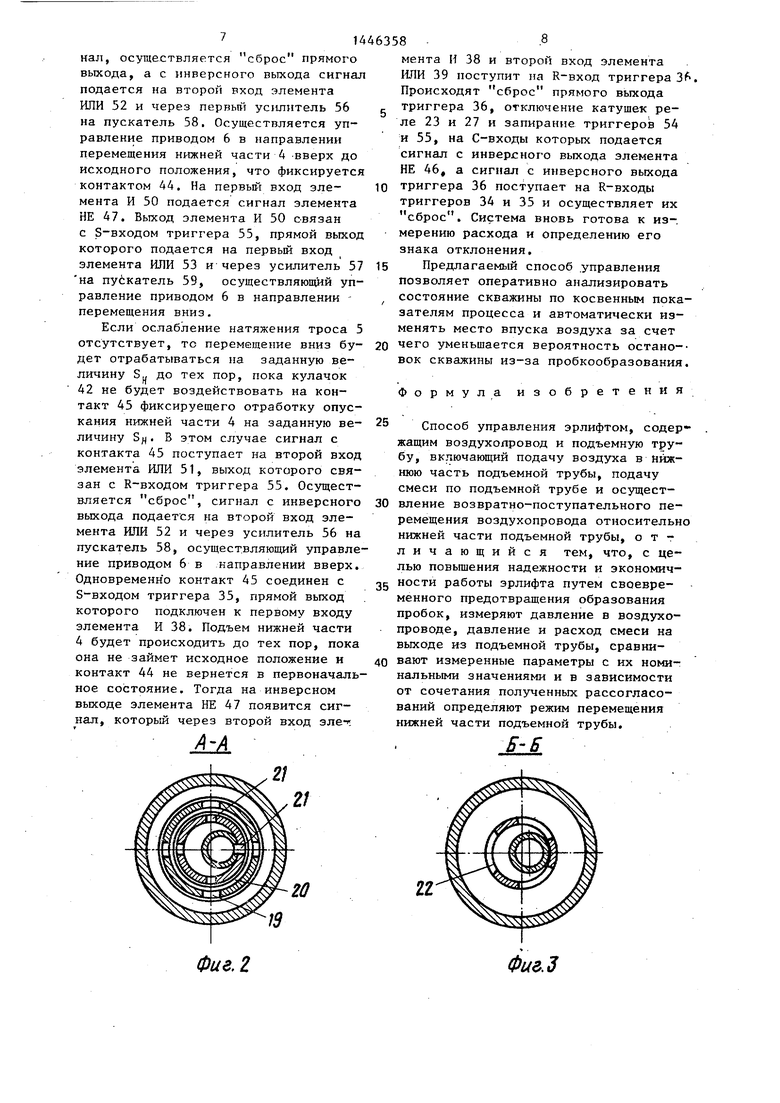
Нижняя часть 4 подъемной трубы 3 выполнена двухствольной. Труба 17 мялого диаметра расположена внутри наружной трубы 18 с эксцентриситетом Значения диаметров определяются из условия обеспечения заданной скорости движения жидкости и равенства сечений потоков в каждой трубе.
В подъемной трубе 3 выполнены от.верстия 19, соединяющие полость 20
переменного объема через отверстия
21 с внутрея.ней полостью труб 17 и
5
0
О
5
0
нее нижнее положение, и контакта 44, фиксирующег исходное положение. Величина перемещений.нижней части 4 устанавливается смещением кулачков 42.
Блок 16 управления приводом 6 (фиг.6) содержит элементы НЕ 46-48j элементы И 49 и 50, элементы 1ШИ 51-- 53, триггеры 54 и 55, усилители 56-. и 57 и пускатели 58 и 59.
Воздух под постоянным давлением по воздуховоду 1 через отверстия 19 в подъег-шой трубе 3 поступает в полость 20 переменного объема, образованную внутренней поверхностью, подъемной трубь 3 и наружной поверхностью наружной трубы 1-8 нижней части 4. Из полости 20 газ через отверстия 21 труб 17 и 18 поступает в их внутренние полости.
В процессе эрлифта датчиком 11 измеряются значения расхода смеси на выкиде С Сважины и подаются на фильтр 31 блока 12 определения знака отклонения расхода, Пос ле прохождения сглаживающего фильтра 31 средняя величина расхода q подается в устройство 32, где производится сравнение зтого расхода с номинальным значением q ц.
Величина рассогласования dq Я ср Я м подается на вход преобразователя 33 с характеристикой
О при jq 7 4 q
j
slgn(iq) (
-1 при 4 q 4q j ,
где Jqj - зaдaн oe допустимое значение рассогласования расхода .
Если рассогласование то с выхода преобразователя 33 подается сигнал на S-вход триггера 36, с прямого выхода которого подается сигнал на катушки реле 23 и 27 соответственно блока 8 определения знака отклонения давления Р « в кольцевом пространстве 2 и блока 10 определени знака отклонения давления Pg на буфере скважины. Одновременно сигнал с прямого выхода триггера 36 подается на вход элемента НЕ 46 блока 16 управления, затем на С-входы 54 и 55 и открывает их для приема сигналов.
Сигнал с прямого выхода триггера 36 подается на катушки реле 23 и 27 и замыкает их контакты, которые подключают датчик 7 к блоку 8, а датчик 9 - к блоку 10. Датчики 7 и 9 фиксируют в течение заданного интервала времени изменение значений давлений в кольцевом пространстве (Р|) и на буфере (§) После прохождения фильтров 24 и 28 средние величины давлений Р.ср . со подаются на устройства 25 и 29s Д производится сравнение их с номинальными значе
ниями Р
и Р
S Величины рассогласований давлений в кольцевом пространстве /IP к Р ср - и на буфере ЛТ g Pfcp- подаются на входы преобразователей 26 и 30 с характеристиками
+ 1 при РК РКИ
О при ,
-1 при JP-/ - f
signC P )
sign(JPj) где и 4Р
О при ЛР -4Р5„ . -1 при Pj-
5н
допустимые значени рассогласований давлений в кольцевом пространстве и на буфере соответственно.
Если фиксируется si.gn(4PK) +1 и 51§п(ЛР5-) -1, то это характеризует уменьшение проводимости подъемной трубы 3 выше отверстий 21} sing(/5r|) -1 и signC Pg) -1 в условиях пескопроявления характерно
0
5
для накопления взвеси на забое скважины.
Сигналы преобразователей 26 и 30 блоков 8 и 10 подаются через множительное устройство схемы 15 знака на преобразователь, где реализуется функция sign() .и на выходе- формируется сигнчл
1+1 при о; О при лР|с-)Р5 О, -1 при лРц- 4Р§ 0.
В схеме 15 знака путем анализа сигналов, поступающих с блоков 8 и 10, однозначно определяется направление вращения привода 6, перемещающего с помощью троса 5 нижнюю часть 4 подъемной трубы 3 при любых сочетаниях выходных сигналов нелинейных преобразователей 26 и 30,
Если signC F -ЛР{) +1, Tve. signC P) +1 и signCdFj) -1, уменьшается проводимость на участке между местом впуска воздуха (отвер- 5 стия 21) и буфером скважины, тогда сигнал -1 с выхода схемы 15 знака подается на второй вход элемента И 49 блока 16 управления, на первый вход которого подан сигнал с выхода элемента НЕ 47.
Одновременно сигнал с выхода элемента НЕ 47 подается на первый вход элемента И 50 и на вторые входы элементов И 37 и 38 блока 12. На вход элемента НЕ 47 подается сигнал с контакта 44 блока 14, которьй фиксирует исходное положение нижней части 4. Сигнал с выхода элемента Н 49 подается через S-вход первого триггера 54, элемент ИЛИ 52 и усилитель 56 на вход пускателя 58, управляющего приводом 6 при перемещении нижней части 4 вверх. При этом отверстия 21, размещенные на нижней части 4, смещаются вверх с заданной скоростью. Такое непрерывное смещение точек впуска воздуха в лифт создает эффект подвижного воздействия, которьш приводит -к уменьшению объемной концентрации взвеси в слое и увеличению скорости потока.
При отработке перемещений вверх или вниз сигнал на выходе элемента НЕ 47 отсутствует.
Одновременно перемещение троса 5 через мерный ролик 40 и редуктор 41 передается кулачкам 42 14. Если перемещение вверх происходит на установленную заранее величину Sg
0
5
0
5
0
5
514
(величина перемеп;еиия контролируется включением контакта 43), то сигнал поступает на R-вход триггера 5А, затем через элемент ИЛИ 53 и через усилитель 57 на пускатель 59, управляющий приводом 6. Осуществляется перемещение нижней части 4 вниз.
Одновременно контакт 43 связан с S-входом триггера 34, который зало- минает момент достижения нижней частью 4 верхнего крайнего, положения, а прямой выход этого триггера ЗД подается на первый вход элемента И 37. При опускании контролируется также натяжение троса 5 с помощью датчика 13 натяжения, который соединен с входом элемента (iE 48, выход этого элемента подастся на первьй вход элемента ИЛИ 51s выход которого соединеН с R-входон триггера 55, а выход последнего соединен с вторым входом эле- мецта ИЛИ 52. Если натяжение троса 5 отсутствует, тогда на R-входе триггера 55 появляется сигнал, осуществля- ется сброс прямого выхода, а с инверсного выхода сигнал подается на второй вход элемента ИЛИ 52, далее через элемент ИЛИ 52 и усилитель 56 Ш вход пускателя 58. В результате осуществляется управление приводом 6 при подъеме низшей части 4. .При достижении верхнего крайнего положения срабатывает контакт 43, сигнал поступает на R-вход триггера 54, осущест- вляется сброс прямого выхода, а с инверсного выхода сигнал подается на второй вход элемента ИЛИ 53 и через усилитель 57 на пускатель 59, осуществляющий управление приводом 6 при опускание:.
Если ослабления натяжения троса 5 не наблюдается, перемещение осуществляется до тех пор, пока нижняя часть
4 не достигнет исходного положения
и контакты 44 не вернутся в первоначальное состояние. Тогда на выходе элемента НЕ 48 появляется сигнал, который одновременно подается, как и прежде, на вторые входы Элементов И 37 и 38 и на первые входы элементов И 49 и 50. Выход элемента И 37 соединяется через элемент ИЛИ 39 с R-входом триггера 36. Осуществляется
сброс прямого выхода триггера 36. Происходят отключение реле 23 и 27 и запираь ме триггеров 54 и 55, на С-входы КО7орь х подается сигнал с элемента MJ: 46. Сигнал с инверсного
Q д 5 О Q
5
Q
g
38 6
выхода триггера 36 поДгзется на R-BXO- ды триггеров 34 и 35 и осуществляет их сброс. Система становится подготовленной к. измерению расхода. Снова в течение заданного интервала времени измеряется расход смеси и определяется знак отклонения расхода. При обнаружении недопустимого отрицательного отклонения процедура повторяется. Система будет каждый раз отрабатывать заданные перемещения до тех пор, пока параметр выходного показателя - расхода не окажется в пределах нормы при возвращении в исходное рабочее положение нижней части 4 подъемной трубы 3.
Если при недопустимом отрицательном отклонении расхода в течение заданного интервала времени зафиксировано
51§п(ЛРк) -1 при jr, и sign(i3P) -1 при ЛГу , причем signC SP -ар -) +1, что характерно условию накопления взвеси на забое скважины, то сигнал +1 с выхода схемы 15 знака подается на второй вход элемен а И 50, на -первый вход которого подается с.игнал с инверсно-- го выхода элемента НЕ 47. Одновременно этот сигнал подается на первый вход элемента И 49 и на вторые входы элементов И 37 и 33. Па вход элемента НЕ 47 подается сигнал с контакта 44, который фиксирует исходное рабочее положение нижней части 4 подъемной трубы 3. Сигнал с выхода элемента И 50 подается на S-вход триггера 55, который открыт ввиду отсутствия сигнала на С-входе. Затем через прямой вьпгод триггера 55 сигнал подается через первый вход элемента ИЛИ 53, и через усилитель 57 на вход пускателя 59. В результате осуществляется перемепдение нижней части 4 вниз. При опускании контролируется натяжение троса 5 с помощью датчика -3 натяжения. На второй вход элемента ИЛИ- 51 подается сигнал с контакта 45, который соединен с S-входом триггера 35, прямой вьгход последнего соединен с первым входом элемента И 38, выход которого подается на второй вход элемента ИЛИ 39, соединенного с R-входом триггера 36. Осуществляется сброс его прямого выхода. Если при опускании натяжение троса 5 отсутствует, тогда на R-входе триггера 55 появляется сигАА
21
Фиг. 2
Фие.З
/
19
-19 2f
0ije.
/7-1
й5
| Эрлифт для очистки зумпфа | 1981 |
|
SU966320A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
