I
Изобретение относится к оборудованию для производства кирпича и может быть использовано при создании автоматов-укладчиков керамических камней и силикатного кирпича.
Известна система управления автоматомукладчиком кирпича СМ 1030А, содержащая поворотную штангу с кулачками, сдвинутыми по -вертикали на высоту слоя и на угол, равный 360°/п, где п - число слоев на вагонетке. Штанга снабжена храповым механизмом, взаимодействуюш.им с очередным кулачком вагонетки 1. Такая система является сложной и недостаточно надежной. Применение ее затрудняется также высотой вагонеток и колебаниями размеров кирпича.
Известна другая система автоматического управления укладкой кирпича, содержащая захваты с приводом, входы которого соединены с выходами пускателей управления подъемом и опусканием захватов 2. Эта система ближе к описываемому изобретению. Однако в этой системе при постановке переносимого слоя изделий на ранее поставленный захват смещается относительно направляющих, что вызывает сигнал, обеспечивающий отклонение привода спускания. При такой системе управления на предыдущий слой в момент опускания кирпича воздействует вес всего захвата и устанавливаемого слоя, что приводит к деформациям и разрушению изделий.
Цель изобретения - повыщение надежности работы.
Это достигается тем, что система автоматического управления укладкой кирпича, содержащая захваты с приводом, входы которого соединены с выходками пускателей управленияподъемом и опусканием захватов, дополнительно снабжена датчиком разжима захватов,, датчика.ми наличия захватов над вагонеткой и над местом съема кирпича, датчиком свободной подвески захватов, ло-
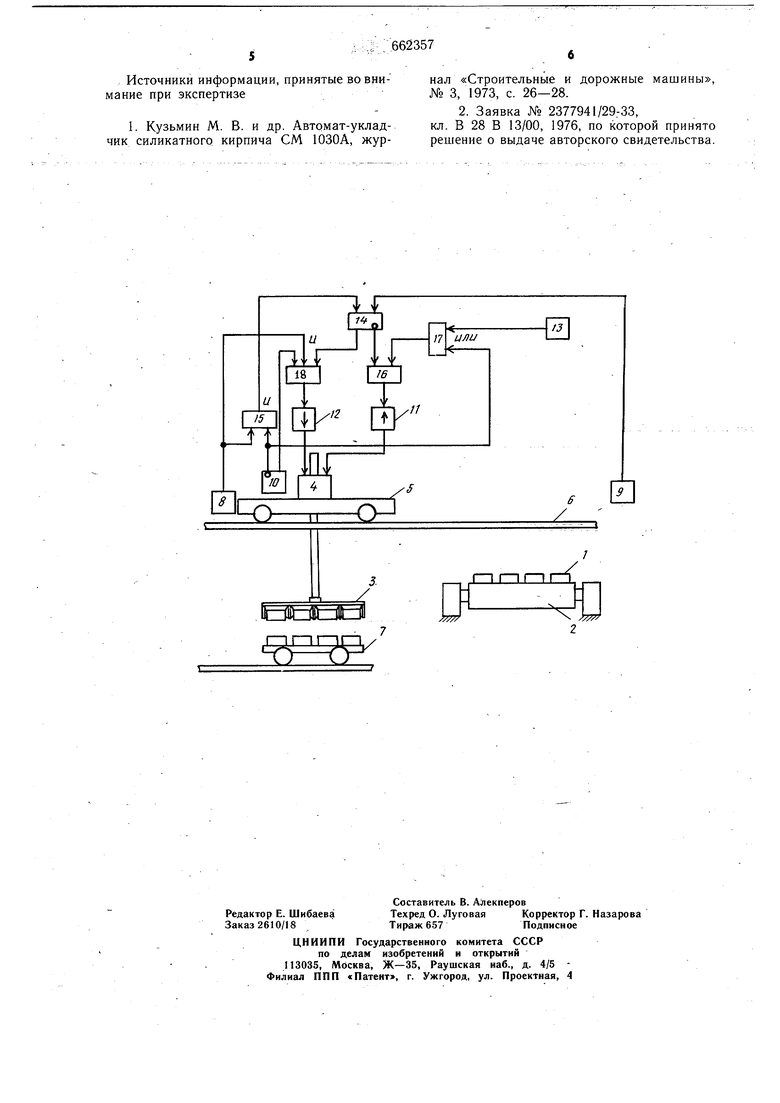
5 гическими элементами «И, «ИЛИ и триггером, причем к одному входу триггера подключен датчик наличия захватов над местом съема, а к другому - выход первого элемента «И. К входам первого элемента «И при0соедииенр датчик наличия захватов над вагоьсткой и инверсный выход датчика свободной подвески захватов, вход пускателя управления опусканием захватов соединен с входом второго элемента «И, к входам -которого подключены прямой выход датчика свободной подвески захватов, прямой выход триггера и датчик наличия захвата над вагонеткой, вход пускателя управле ния подъемом захватов соединен с выходом третьего элемента «И, к входам которого подключены инверсный выход триггера и выход элемента «ИЛИ, входы которого соединены с датчиком разжима захватов и инверсным выходом датчика свободной подвески захватов. На чертеже схематично изображена система автоматического управления укладкой кирпича. Кирпичи 1 комплектуются на транспортере 2 и снимаются с него захватами 3 приводом 4, расположенными на тележке 5. Тележка 5 установлена на рельсовом пути 6. рпида 7 1Эдь1ваются в несколько слоев н а вагонетку 7, над которой установлен датчик 8наличия захватов над вагонеткой. Датчик 9наличия захватов над местом съема кирпича находится у транспортера 2. Привод 4 снабжен датчиком 10 свободной подвески захватов и подключен к пускателю 11 управления подъемом захватов и пускателю 12 управления опусканием захватов. Датчик 10 может быть выполнен, например, в виде устройства контроля натяжения троса, на котором подвешены захваты. Захваты 3 снабжены датчиком 13 разжима захватов, который может быть выполнен, например, в виде реле давления (у пневмозахватов) либо в виде реле времени. Система снабжена триггером 14, к одному входу которого подключен датчик 9, а к другому через элемент «И 15 - датчик 8 и инверсный выход датчика 10. Пускатель 11 подключен к элементу «И 16, к входам которого подсоединены инверсный выход триггера 14 и элемент «ИЛИ 17. Входы элемента «ИЛИ соединены с инверсным выходом датчика 10 и датчиком 13. Пускатель 12 подключен к третьему элементу «И 18, входы которого соединены с прямым входом датчика 10, прямым входом триггера 14 и с датчиком 8. Система автоматического управления работает следующим образом. При съеме кирпича 1 с транспортера 2 захватами 3 сигнал с датчика 9 обеспечивает включение триггера 14. Тележка 5 переносит кирпичи к вагонетке 7, где воздействует на датчик 8. Поскольку захваты 3 свободно подвешены,на прямом выходе датчика 10 имеется сигнал. Наличие на входах элементов «И 18 сигналов с датчиков 8 и 10 и триггера 14 обеспечивает на его выходе сигнал, включающий пускатель 12 привода 4 захватов. Захваты 3 опускаются до соприкосновения переносимого слоя с ранее уложенным на вагонетку или с днишем вагонетки 5. При этом подвеска захватов 3 разгружается и воздействует на датчик 10, с прямого- выхода которого сигнал исчезает, а на инверсном выходе появляется. Сигналы с датчика 8 и инверсного выхода датчика 10, поданные через элемент «1 15, на второй вход триггера 14 отключают этот триггер. На его прямом выходе сигнал исчезает и появляется на инверсном выходе. Пускатель 12 отключается, а пускатель 1 включается сигналами, поданными через элемент «И 16 с инверсного выхода триггера 14 и элемента «ИЛИ, на вход которого поступает сигнал с инверсного выхода датчика 10. Захваты поднимаются вверх до момента нового нагружения подвески. Сигнал с инверсного выхода датчика 10 исчезает, и пускатель 11 отключается. Захваты останавливаются при зазоре 2-3 мм между укладываемым и уложенным слоями. Одновременно включается разжим захватов (на чертеже не показано). После окончательного разжима захватов сигнал с датчика 13 разжима захватов подается на второй вход системы «ИЛИ, блокируя пускатель 11, захваты 3 поднимаются в верхнее положение, и тележка 5 перемешается к транспортеру 2. Цикл повторяется. Формула изобретения Система автоматического управления укладкой кирпича, содержашая захваты с приводом, входы которого соединены с выходами пускателей управления подъемом и опусканием захватов, отличающаяся тем, что, с целью повышения надежности работы, система дополнительно снабжена датчиком разжима захватов, датчиками наличия захватов над вагонеткой и над местом съема кирпича, датчиком свободной подвески захватов, логическими элементами «И, «ИЛИ и триггером, причем к одному входу триггера подключен датчик наличия захватов над местом съема кирпича, а к другому - выход первого элемента «И, квходам первого элемента «И присоединены датчик наличия захватов над вагонеткой и инверсный выход датчика свободной подвески захватов, вход пускателя управления опусканием захватов-соединен с выходом второго элемента «И, к входам которого подключены прямой выход датчика свободной подвески захватов, прямой выход триггера и датчик наличия захвата над вагонеткой, вход пускателя управления подъемом захватов соединен с выходом третьего элемента «И, к входам которого подключены инверсньгй выход триггера и выход элемента «ИЛИ, входы которого соединены с датчиком разжима захватов и инверсным выходом датчика свободной подвески захватов.
Источники информации, принятые во внимание при экспертизе
1. Кузьмин М. В. и др. Автомат-укладчик силикатного кирпича СМ 1030А, журнал «Строительные и дорожные машины, № 3, 1973, с. 26-28.
2. Заявка № 2377941/29:33, кл. В 28 В 13/00, 1976, по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления укладкой кирпича | 1989 |
|
SU1653981A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Система автоматического управления укладкой кирпича | 1985 |
|
SU1315325A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| Автомат для съема кирпича сКОНВЕйЕРА | 1979 |
|
SU829436A1 |
| Устройство для автоматического управления укладкой кирпича | 1983 |
|
SU1209544A1 |
| Устройство для укладки и съема изделий с сушильной вагонетки | 1975 |
|
SU551175A1 |
/
г
/////
