Известны способы автоматического управления нажимным устройством прокатного стана, в частности с гидравлическим приводом нажимного устройства, управляемого посредством шаблона с копировальной линейкой и с электрическим приводом, снабженным программным управлением.
Описываемый способ также касается автоматического управления нажимным устройством прокатного стана и имеет цель-повышение производительиости прокатного стана и автоматизацию управления пажимным устройством.
Это достигается тем, что для привода нажимного устройства прокатного стана применены гидравлический силовой элемент, управляемый универсальным .блоком связи (электромагнитным регулятором или маломощным сервомотором), автоматическое программное управление и регулирование.
Кроме того, для уменьшения металлоемкости конструкции нажимного устройства, ее удешевления и упрощения используют систему, состоящую из универсального блока связи (электромагнитного регулятора или маломощного сервомотора), гидронажимного, программного (бескопирного) и следящего устройств.
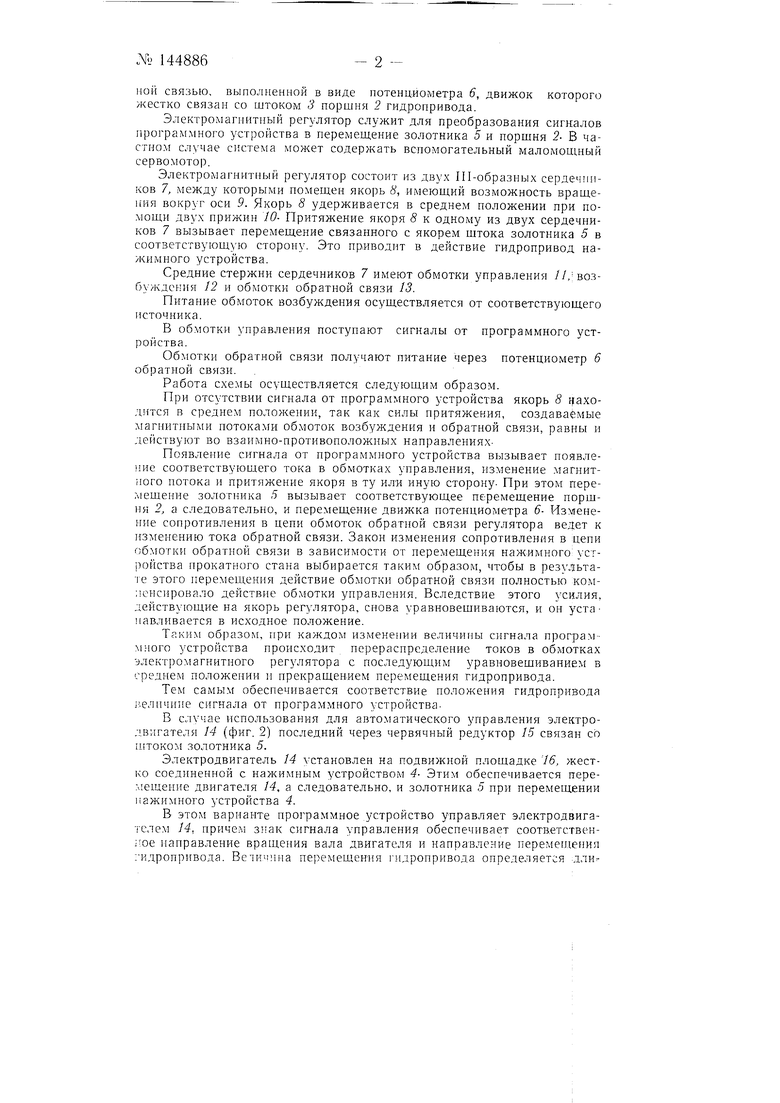
На фиг 1 представлена схема автоматического управле)1ия гидроприводом нажимного устройства прокатного стана при помощи ниверсального блока связи (электромагнитного регулятора): на фиг- 2 изображен вариант схемы автоматического управления с электродвигателем II механической обратной связьюГидравлический привод нажимного устройства (фиг. 1) состоит из цилиндра / и поршня 2. шток 3 которого связан с нажимным устройством прокатного стана 4. Рабочая жидкость в цилиндр поступает через золотниковый распределитель. Управление перемещением золотника 5 осуществляется электромагнитным регулятором с электрической обрат.N 144886™ 2 ной связью, выполненной в виде потенциометра 6, движок которого жестко связан со штоком 3 поршня 2 гидропривода.
Электромагнитный регулятор служит для преобразования сигналов программного устройства в перемещение золотника 5 и поршня 2- В частном случае система может содержать вспомогательный маломощный сервомотор.
Электромагнитный регулятор состоит из двух 111-образиых сердечников 7, между которыми помещен якорь 8, имеющий возможность вращения вокруг оси 9. Якорь 8 удерживается в среднем положении при помощи двух прижин 10- Притяжение якоря 8 к одному из двух сердечников 7 вызывает перемещение связанного с якорем штока золотника 5 в соответствующую сторону. Это приводит в действие гидропривод нажимного устройства.
Средние стержни сердечников 7 имеют обмотки управления //.возбуждения J/2 и обмотки обратной связи 13.
Питание обмоток возбуждения осуществляется от соответствующего источника.
В обмотки унравления поступают сигналы от программного устройства.
Обмотки обратной связи получают питание через потенциометр 6 обратной связи.
Работа схемы осуществляется следующим образом.
При отсутствии сигнала от программного устройства якорь 8 находится в среднем положении, так как силы притяжения, создаваемые магнитными потоками обмоток возбуждения и обратной связи, равны и действуют во взаимно-противоположных направленияхПоявление сигнала от программного устройства вызывает ноявлеuie соответствующего тока в обмотках управления, изменение магнитного потока и притяжение якоря в ту или иную сторону- При этом перемещение золотника 5 вызывает соответствующее перемещение поршия 2, а следовательно, и перемещение движка потенциометра 6- Изменение сопротивления в цепи обмоток обратной связи регулятора ведет к изменению тока обратной связи. Закон изменения сопротивления в цепи обмотки обратной связи в зависимости от перемещения нажимного устройства прокатного стана выбирается таким образом, чтобы в результате этого перемещения действие обмотки обратной связи полностью ком;1енснровало действие обмотки управления. Вследствие этого усилия, действующие на якорь регулятора, снова уравновешиваются, и он устанавливается в исходное положение.
Таким образом, при каждом изменении величины сигнала программного устройства происходит перераспределение токов в обмотках электромагнитного регулятора с последующим уравновешиванием в среднем положении и прекращением перемещения гидропривода.
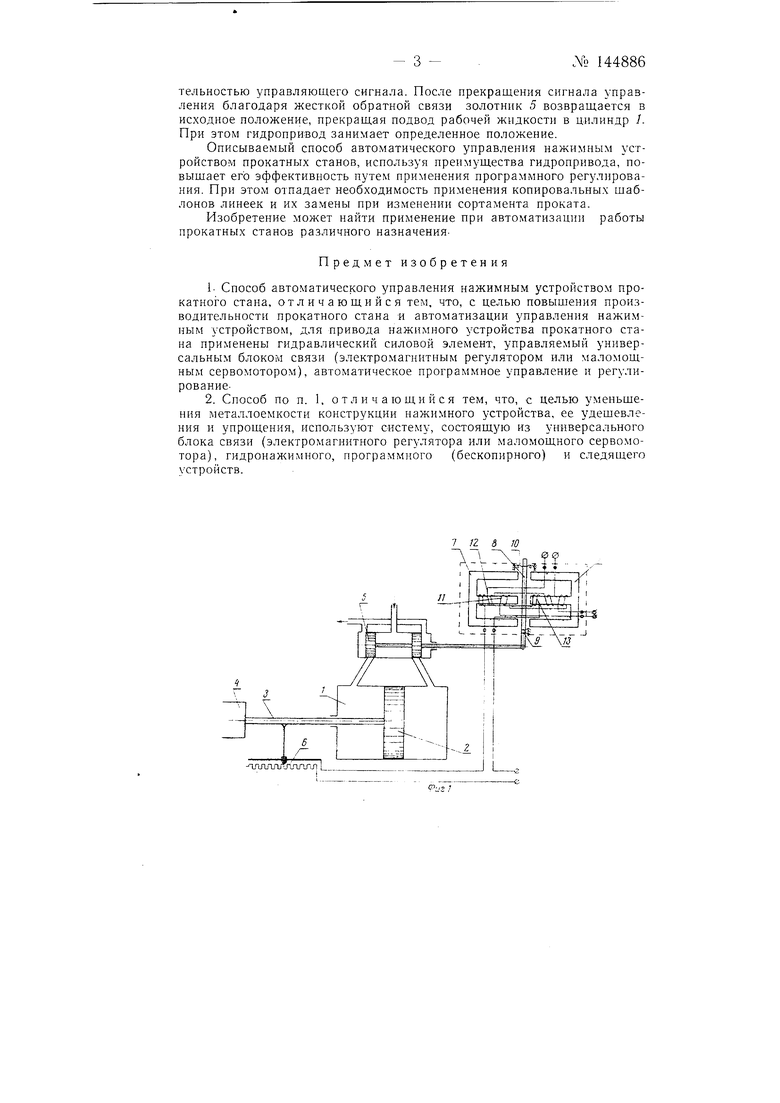
Тем самы.м обеспечивается соответствие положения гидропривода i-еличние сигнала от программного устройстваВ случае использования для автоматического управления электродвигателя М (фиг. 2) последний через червячный редуктор 15 связан со штоком золотника 5.
Электродвигатель 14 установлен на подвижной площадке 16, жестко соединенной с нажимным устройством 4- Этим обеспечивается пере eщeниe двигателя 14, а следовательно, и золотника 5 при перемещении 1 ажимного устройства 4.
В этом варианте программное устройство управляет электродвигателем 14, причем знак сигнала управления обеспечивает соответственное направление вращения вала двигателя и направление нерементения :-идронривода. Вси-П мна перемещения гидропривода определяется .дли тельностью управляющего сигнала. После прекращения сигнала управления благодаря жесткой обратной связи золотник 5 возвращается в исходное положение, прекращая подвод рабочей жидкости в цилиндр 1. При этом гидропривод занимает определенное положение.
Описываемый способ автоматического управления нажимЕ1Ым устройством прокатных станов, используя преимущества гидропривода, повыщает его эффективность путем применения программного регулирования. При этом отпадает необходимость применения копировальных щаблонов линеек и их замены при изменении сортамента проката.
Изобретение может найти применение при автоматизации работы прокатных станов различного назначенияПредмет изобретения
I- Способ автоматического управления нажимным устройством прокатного стана, отличающийся тем, что, с целью повышения производительности прокатного стана и автоматизации управления нажимным устройством, для привода нажимного устройства прокатного стана применены гидравлический силовой элемент, управляемый универсальным блоком связи (электро.магнитным регулятором или маломощным сервомотором), автоматическое программное управление и регулирование2. Способ по п. 1. отличающийся тем, что, с целью уменьщения металлоемкости конструкции нажимного устройства, ее удещевления и упрощения, используют систему, состоящую из универсального блока связи (электромагнитного регулятора или маломощного сервомотора), гидронажимного, программного (бескопирного) и следяпдего устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования нагрузки главного привода реверсивного прокатного стана | 1961 |
|
SU145648A1 |
| Электромагнитное реле | 1959 |
|
SU138668A1 |
| Прокатная клеть | 1974 |
|
SU599865A1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| СПОСОБ ПРОКАТКИ, ПРОКАТНАЯ КЛЕТЬ И НАЖИМНОЕ УСТРОЙСТВО ПРОКАТНОЙ КЛЕТИ | 2001 |
|
RU2207925C2 |
| Устройство для регулирования положения гидронажимного механизма прокатной клети | 1987 |
|
SU1412934A1 |
| Электропривод для прокатного стана | 1949 |
|
SU89485A1 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ САМОЛЕТА | 1984 |
|
SU1228395A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ПРИВОДА РЕГУЛИРУЮЩЕГО ОРГАНА | 2008 |
|
RU2366820C1 |
-алгигштл/1Г1/1
I rs I
4;
