ND
СО
со
4
Изобретение относится к автоматическому управлению прокатными станами и может быть применено для авто- MjiTH4ecKoro регулирования положения гидронажимного устройства.
Цель изобретения - повьшение точности регулирования положения гидро- :нажимного механизма.
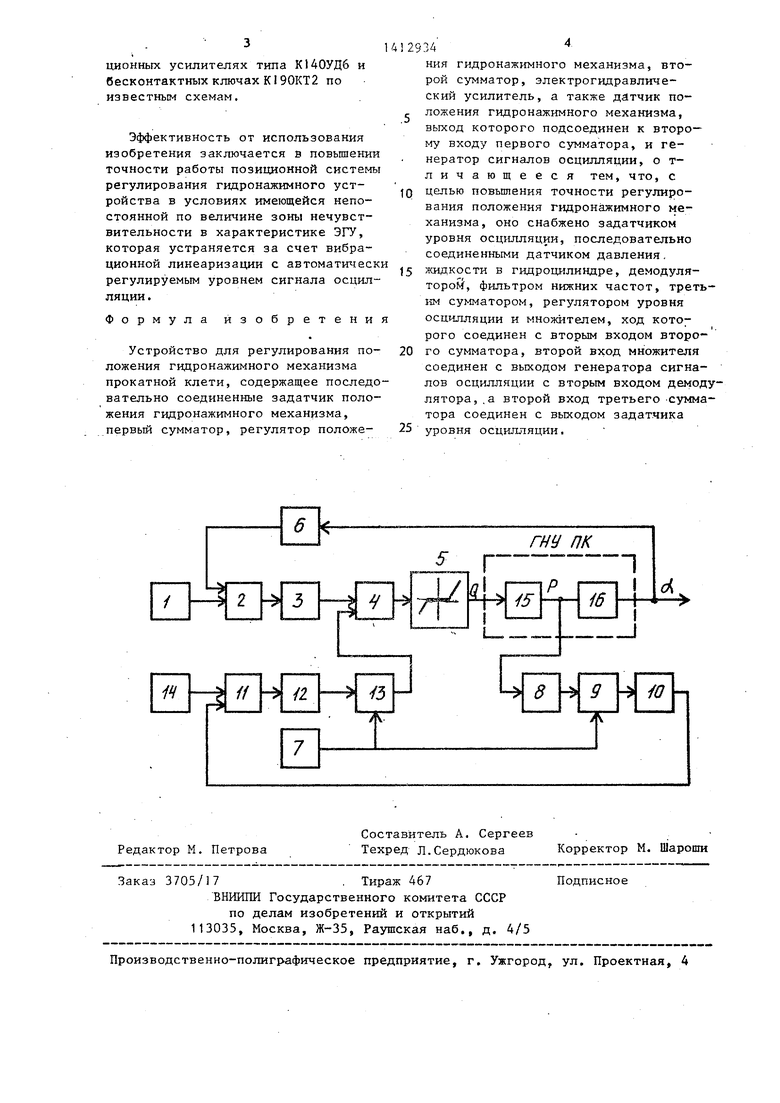
На чертеже приведена структурная схема устройства,
: Устройство содержит последователь ;но соединенные задатчик 1 положения гидронажимного механизма, первый :сумматор 2, регулятор 3 положения I гидронажимного механизма, второй I сумматор 4, электрогидравлический :усилитель 5, а также датчик 6 поло- :жения гидронажимного механизма, выход которого соединен с вторым вхо- хом первого сумматора, генератор 7 сигналов осцилляции. Кроме того, устройство включает в себя последовательно соединенные датчик 8 давления жидкости в гидроцилиндре, демодулятор 9, фильтр 10 нижних частот, третий сумматор 11, регулятор 12 уровня осцилляции, выход которого подсоединен к первому входу множителя 13, к второму входу которого подсоединен выход генератора 7 сигналов осцилляции, выход множителя соединен с вторым входом второго сумматора, выход генератора 7 осцилляции соединен с вторым входом демодулятора 9, а к второму входу третьего сумматора подсоединен выход за- датчика 14 уровня осцилляции. Гидронажимное устройство прокатной клети может быть представлено двумя последовательно соединенными звеньями 15 и 16, определяющими взаимосвязь между основными координатами объекта Q - расход жидкости, поступающей в гидроцилиндр через ЭГУ, с учетом утечек J Р - давление в цилиндре, d- положение гидронажимного механизма, При этом передаточные функции ,
W., этих звеньев имеют вид;
, Р k (T,P+l) . .
15 (Р -Q ()rTlPH),
w..(P) t
где
) коэффициент;
Т ,Т2,Тз,Т;, - постоян:1ые времени;
S - площадь поршня в гидроцилиндре J
0
5
0
5
0
5
0
5
0
5
С - модуль упругости прокатной клети.
Устройство работает следующим образом.
Блоки регулирования 1-6 устройства регулирования и звенья 15 и 16 объекта управления образуют замкнутую систему регулирования положения гидронажимного механизма, настраив аемую на модульный оптимум. Блоки 4, 5, 7-14 устройства регулирования и звено 15 объекта управления образуют вторую систему регулирования - систему регулирования уровня осцилляции. Эта система автоматически поддерживает минимально необходимое превышение амплитудой сигнала осцилляции зоны нечувствительности ЭГУ за счет соответствующего регулирования средней величины колебаний давления в гидроци- ли1-адре на частоте осцилляции. При изменении величины зоны нечустви- тельности меняется амплитуда сигнала осцилляции, поступающего с выхода множителя 13 через сумматор 4 на вход ЭГУ таким образом, чтобы сохранялась средняя величина колебаний давления с частотой гене ратора 7 сигналов осцилляции. Демодулятор 9, на моделирующий вход которого подается сигнал генератора 7, из всего спектра частот в выходном сигнале датчика 8 давления выделяет на своем выходе только колебания давления с частотой осцилляции, выпрямляет их и через фильтр 10 нижних ча стот подает в ка- честве сигнала обратной связи на сум- метор 11, где он сравнивается с сигналом задатчика I4 уровня осцилляции. С выхода сумматора 11 разностный сигнал через регулятор 12 поступает на один из входов множителя 13, на выходе которого величина сигнала изменяется пропорционально выходному сигналу регулятора осцилляции. Регулятор осцилляции выполняется интегральным с большой постоянной времени, так как здесь требуется достаточно высокая статическая точность регулирования и не требуется высокого быстродействия (изменение величины зоны нечувствительности ЭГУ происходит медленно) .
Все блоки устройства могут быть выполнены на стандартной аппаратуре, например на интегралы-тых опера5
ционных усилителях типа К140УД6 и бесконтактных ключах К1 90КТ2 по известным схемам.
Эффективность от использования изобретения заключается в повышении точности работы позиционной системы регулирования гидронажимного устройства в условиях имеющейся непостоянной по величине зоны нечувствительности в характеристике ЭГУ, которая устраняется за счет вибрационной линеаризации с автоматическ регулируемым уровнем сигнала осцилляции .
Формула изобретени
Устройство для регулирования положения гидронажимного механизма прокатной клети, содержащее последовательно соединенные задатчик положения гидронажимного механизма, первый сумматор, регулятор положе.5
to
12934
ния гидронажимного механизма, второй сумматор, электрогидравлический усилитель, а также датчик положения гидронажимного механизма, выход которого подсоединен к второму входу первого сумматора, и генератор сигналов осцилляции, о т- личающееся тем, что, с целью повышения точности регулирования положения гидронажимного механизма, оно снабжено задатчиком уровня осцилляции, последовательно соединенными датчиком давления, жидкости в гидроцилиндре, демодулятором, фильтром нижних частот, третьим сумматором, регулятором уровня осцилляции и множителем, ход которого соединен с вторым входом второ го сумматора, второй вход множителя соединен с выходом генератора сигналов осцилляции с вторым входом демодулятора, ,а второй вход третьего -сумматора соединен с выходом задатчика уровня осцилляции.
15
20
25
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| Устройство регулирования положения гидронажимного механизма прокатной клети | 1980 |
|
SU925459A1 |
| Устройство управления скоростным режимом группы клетей непрерывного прокатного стана | 1986 |
|
SU1397111A1 |
| Система автоматической настройки эквивалентной жесткости клети | 1980 |
|
SU884769A1 |
| Устройство для регулирования жесткости прокатной клети | 1977 |
|
SU749479A1 |
| Устройство для синхронизации нажимных винтов клети прокатного стана | 1968 |
|
SU600679A1 |
| Устройство регулирования межклетевого натяжения на непрерывном стане холодной прокатки | 1982 |
|
SU1037983A1 |
| Устройство совмещенного регулирования толщины и формы полосы на стане | 1981 |
|
SU997880A1 |
| Устройство автоматического регулирования уровня металла в кристаллизаторе машины непрерывного литья заготовок | 1984 |
|
SU1214318A1 |
Изобретение относится к автоматическому управлению прокатными станами и м.б. применено для автоматического регулирования положения гидронажимного устройства. Пель изобретения - повышение точности регулирования. Для этого автоматически поддерживается оптимальное соотношение величины зоны нечувствительности и уровня сигнала осцилляции. Устройство содержит датчик давления жидкости, демодулятор, регулятор уровня осцилляции, множитель, задат- чик и генератор сигналов осцилляции. 1 ил. S (Л
| Устройство регулирования положения гидронажимного механизма прокатной клети | 1980 |
|
SU925459A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Трансформатор для ртутных ламп | 1924 |
|
SU1400A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Киевский институт автоматики, 1977. | |||
