СИ
Изобретение относится к кругло- вязальным машинам, конкретно к устройствам отбора рабочих игл.
Цель изобретения - повышение на- дежности отбора.
На фиг.1 показана схема процесса формирования петель; на фиг.2, 3 - устройство отбора игл (известное) , на фиг.-6 - варианты выполнения отбирающих устройств согласно изобретению.
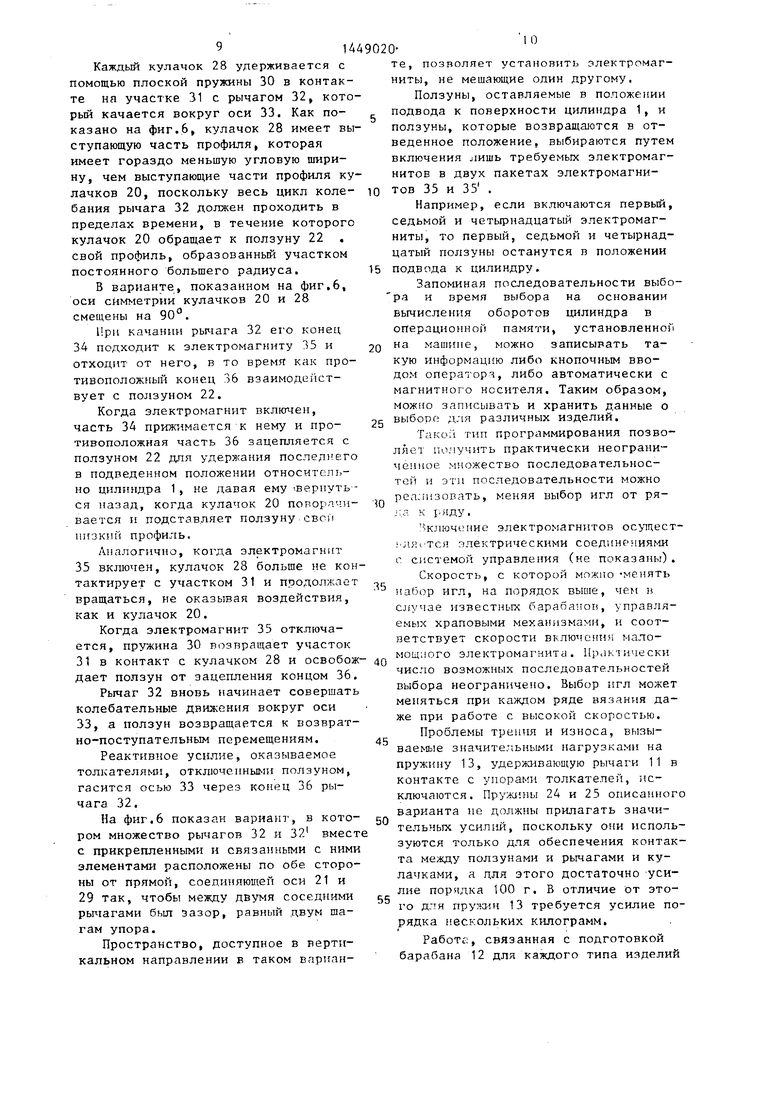
Цилиндр показан позицией 1, а ка- навки - позицией 2. Число канавок равно числу игл 3, которые выполняют в них возвратно-поступательные перемещения. Обычно на цилиндре содержится от 200 до 400 игл. Иглы совершают возвратно-поступательные перемещения неткду максимальным и минимальным по- ложепиями, в которые сии смен.аются петлеформирующими кулачками (не показаны) ,
Цилиндр вращается, приводя к,с вращению иглы, которые в ходе своего возвратно-поступательного перемещени подаются в фиксированное угловое положение при наивыс1Ш1х уровнях стюего отклонения посредством питателе; i;. тей. При изготовлении трикотажных издсли11 обычно используется часть имеющихся игл, которые . используюТ :; одинаково и одногфеменно, за исключением тех участков изделия, которые вяжутся гладко и для вязки которых используются все иглы, перемещаясь между наивысшим и наинизшим уровнями, причем на каждую из них подается нить при каждом цикле вязания и все они перемещаются одинаково. Когда машина вяжет не плоские, а другие типы изделий, например сетчатое или регулярное рисунчатое вязание, часть игл необходима для образова- ния петель, а другие требуются либо для подъема до промежуточного уровня, для приема нити без схода предшествующих петель, об.разуя таким образом прессовые петли, либо для подъема с задержкой так, чтобы не захватывать подаваемую нить в определенном угловом положении и не врабатывать с ее помощью новых петел т.е. происходит селекция игл. Это значит, что при каждом обороте, цилиндра необходимо определить сколько и какие иглы должны быть отклонены и сколько и какие иглы должны
0
5
5 0 д
быть отклонены в иной степени или не отклоняться вообще.
Этот выбор определяется толкателями 4, которые перемещаются в тех же канавках, что и иглы, расположенные над ними, поэтому толкатели : перемещают иглы вверх до наивысшего уровня для захвата нити.
Когда толкатели переводят иглы в рабочее положение, они отводятся от торца иглы и опускаются вниз. Когда игла захватила нить и сформировала петлю, она находится на нижнем уровне, если не требуется захватить другую нить от другого питателя, и остается на этом уровне, поскольку ее управляющш1 толкатель опущен.
Толкатель 4 имеет особую форму, котора; соответствует его точной функции. Он имеет небольшую кривизну (что дает эффект наклона) в направлении, перпендикулярном плоскости чертежа. Эта кривизна удерживает толкатель в канавке и обеспечивает точность его позиционирования и отсут- стпие вибрации, удерживая толкатель ц .)м контакте со стенками канавки. Л,11я того, чтобы сдвинуть толкатель в осевом или радиальном направления, необходимо приложить к нему . ,,1е целенное усилие.
1 нюкней части хвостовика толка- ге.мя расположено множество выступов.
Верхний выступ 5, т.е. )ерхиий направляющий упор, взаимодействует с управляющим кулачком G, которьш переводит его вниз, когда завершится цикл подьема иглы 3.
Ниже на хвостовике толкателя расположена последовательность выс- тудов 7, известных как селекторные упоры или зубья, которые служат для фактического выбора (описан ниже), причем их количество достаточно для обеспечения требуемого числа комбинаций выбора. На самом нижне м конце толкателя расположен нижний направляющий упор 8.
Этот упор 8 взаимодействует с двумя неподвижными кулачками, расположенными у основания цилиндра 1.
Кулачок 9 взаимодействует с упором 8 в радиальном направлении, отводя его по направлению вовне так, что он приходит во взаимодействие с кулачком 10, перемещающим упор 8 вертикально вверх.
Все толкатели отводятся по направлению вовне так, что они входят во взаимодействие с кулачком 10 и затем поднимаются, чтобы перевести соответствующие им иглы в рабочее положение.
Цель механизма и процедуры выбора заключаются в том, чтобы исключить из общего количества толкателей все толкатели, которые управляю теми иглами, которые для формирования требуемого типа вязания должны подниматься вверх лишь до промежуточного уровня с помощью кулачка.
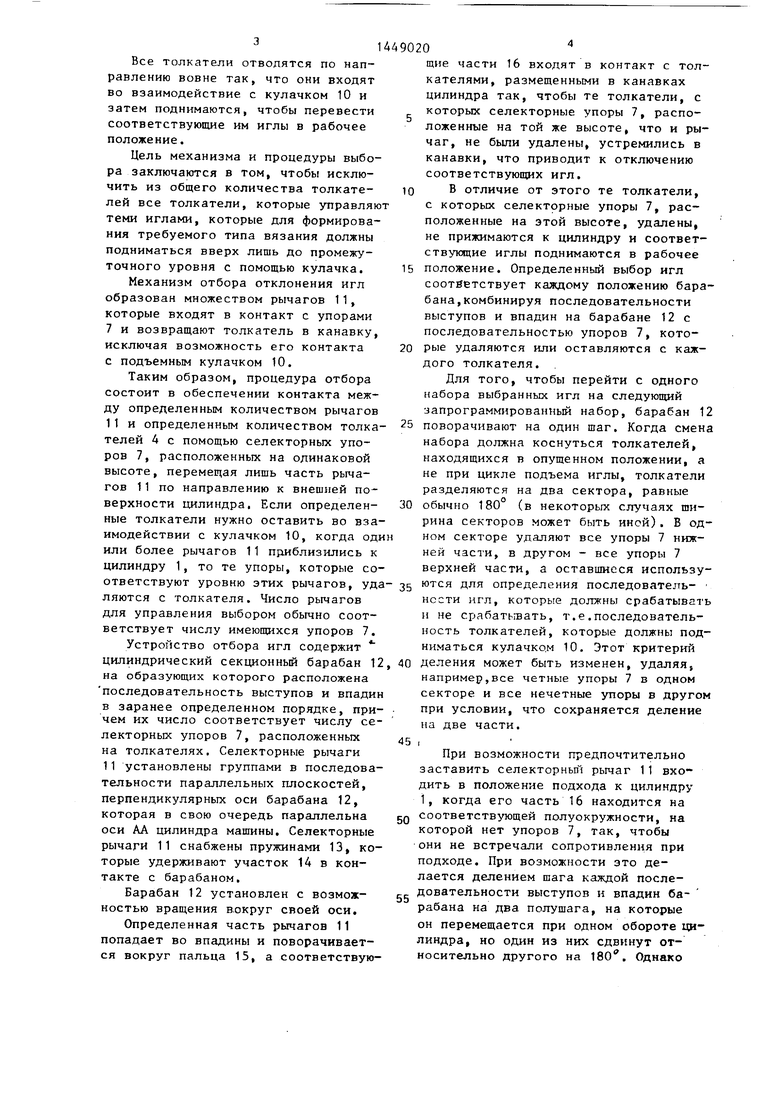
Механизм отбора отклонения игл образован множеством рычагов 11, которые входят в контакт с упорами 7 и возвращают толкатель в канавку, исключая возможность его контакта с подъемным кулачком 10.
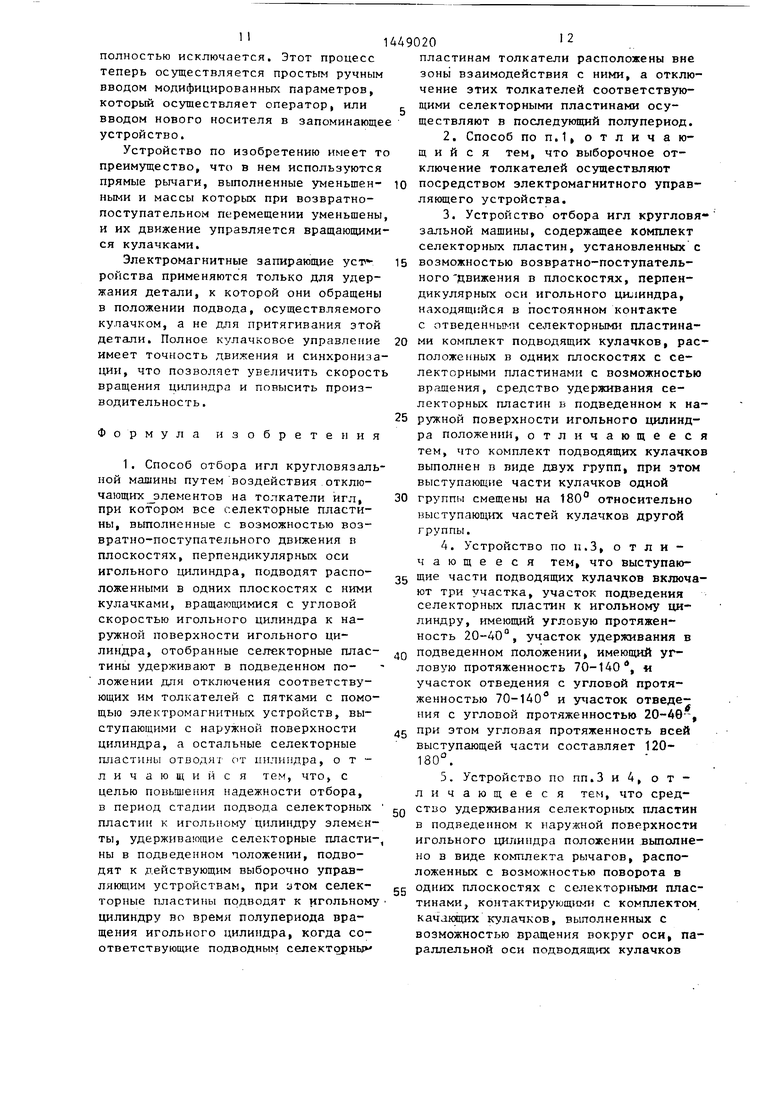
Таким образом, процедура отбора состоит в обеспечении контакта между определенным количеством рычагов 11 и определенным количеством толкателей 4 с помощью селекторных упоров 7, расположенных на одинаковой высоте, перемещая лишь часть рычагов 11 по направлению к внешней поверхности цилиндра. Если определенные толкатели нужно оставить во взаимодействии с кулачком 10, когда од или более рычагов 11 приблизились к цилиндру 1, то те упоры, которые соответствуют уровню этих рычагов, уда- 35 ются для определения последователь- ляются с толкателя. Число рычагов нести игл, которые должны срабатывать для управления выбором обычно соот- и не срабатьшать, т.е.последователь- ветствует числу имеюшлхся упоров 7. ность толкателей, которые должны под- Устройство отбора игл содержит ниматься кулачко.м 10. Этот критерий цилиндрический секционный барабан 12, 40 деления может быть изменен, удаляя,
например,все четные упоры 7 в одном секторе и все нечетные упоры в другом при условии, что сохраняется деление
на образующих которого расположена последовательность выступов и впадин в заранее определенном порядке, причем их число соответствует числу селекторных упоров 7, расположенных на толкателях. Селекторные рычаги 11 установлены группами в последовательности параллельных плоскостей, перпендикулярных оси барабана 12, которая в свою очередь параллельна оси АА цилиндра машины. Селекторные рычаги 11 снабжены пружинами 13, которые удерживают участок 14 в контакте с барабаном.
Барабан 12 установлен с возможностью вращения в.округ своей оси.
Определенная часть рычагов 11 попадает во впадины и поворачивается вокруг пальца 15, а соответствую45
50
55
на две части.
I
При возможности предпочтительно заставить селекторньп рычаг 11 вхо дить в положение подхода к цилиндру 1, когда его часть 16 находится на соответствующей полуокружности, на которой нет упоров 7, так, чтобы они не встречали сопротивления при подходе. При возможности это делается делением шага каждой последовательности выступов и впадин ба- рабана на два полушага, на которые он перемещается при одном обороте цилиндра, но один из них сдвинут относительно другого на 180. Однако
0
щие части 16 входят в контакт с толкателями, размещенными в канавках цилиндра так, чтобы те толкатели, с которых селекторные упоры 7, расположенные на той же высоте, что и рычаг, не были удалены, устремились в канавки, что приводит к отключению соответствующих игл.
В отличие от этого те толкатели, с которых селекторные упоры 7, расположенные на этой высоте, удалены, не прижимаются к цилиндру и соответствующие иглы поднимаются в рабочее 5 положение. Определенный выбор игл
соответствует каждому положению барабана, комбинируя последовательности выступов и впадин на барабане 12 с последовательностью упоров 7, которые удаляются или оставляются с каждого толкателя. .
Для того, чтобы перейти с одного набора выбранных игл на следующий запрограммированный набор, барабан 12 поворачивают на один шаг. Когда смена набора должна коснуться толкателей, находящихся в опущенном положении, а не при цикле подъема иглы, толкатели разделяются на два сектора, равные обычно 180 (в некоторых случаях ширина секторов может быть иной). В одном секторе удаляют все упоры 7 нижней части, в другом - все упоры 7 верхней части, а оставшиеся использу0
5
45
50
55
на две части.
I
При возможности предпочтительно заставить селекторньп рычаг 11 вхо дить в положение подхода к цилиндру 1, когда его часть 16 находится на соответствующей полуокружности, на которой нет упоров 7, так, чтобы они не встречали сопротивления при подходе. При возможности это делается делением шага каждой последовательности выступов и впадин ба- рабана на два полушага, на которые он перемещается при одном обороте цилиндра, но один из них сдвинут относительно другого на 180. Однако
такой подход вдвое уменьшает число возможных комбинаций на барабане 12.
Согласно этому варианту рычаги 11 контактируют своими частями 16 рядом с цилиндр.ом 1 во время предшествующего полуоборота. Когда они установлены в этом положении, они взаимодействуют с упорами 7 толкателей, расположенных на следующей полуокружности, и осуществляют отбор игл на этой полуокружности.
На практике наиболее используемыми конструкциями являются те, в которых используются несколько барабанов и несколько групп рычагов 11, число которых равно числу питателей нитей, что дает возможность использовать кал.д.и1 питатель и формировать со- отвг;тстнуюшую петлю, либо их число может быть равно половине питателей, если питатели выбираются через один (сетчатое вязание). В извест П:х машинах барабан 12 перемещается храповыми механизмами, приь1ёнение которых накладывает опреде-пениые ограиичп- ния. Если необходимо, изготовить трикотажное изделие, где набор игл меняется при каждом цикле, бар. -Паие следует менять последовательность пр каждом обороте.
Широко распространенным примером таких изделий являются .чулки, формируемые сетчатым вязанием, при изготовлении которых последовательность меняется каждые два цикла. Современные кругловязапьные машины работают со скоростью 1000-1500 об/мик. Барабан 12 и его храповые механизмы должны менять набор игл 1000-1500 раз в минуту, совершая 2000-3000 де:йствий в минуту. Такая производительность недостижима для барабана и его храпо вых механизмов как из-за механических ограничений, так и из-за ограниченного числа возможных комбинаций,
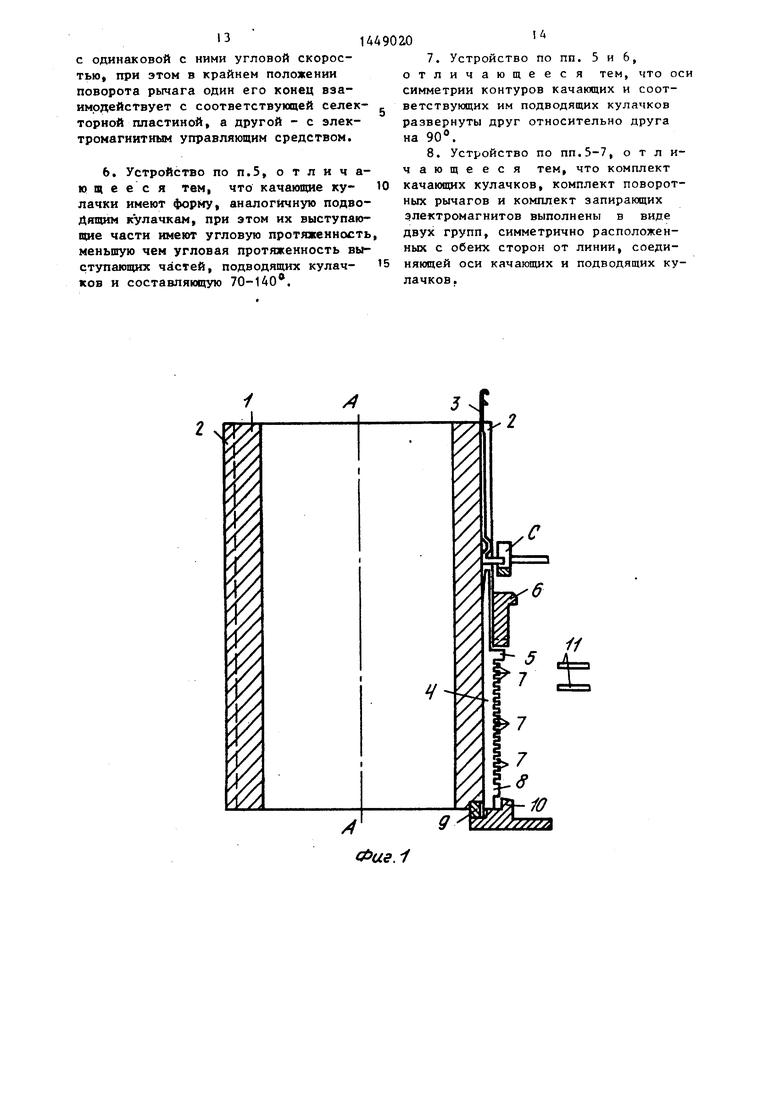
Этот недостаток устраписгся путем введения дополнительного управления модуляцией. Такая система управления состоит из последовательности кулачков 17, которые вращаются вокруг пальца 18 параллельно пальцу 15 с угловой скоростью, согласовантюй со скоростью цилиндра 1 в зависимости от количества питателей (обычно с половинной угловой скоростью для четьфех . п итателей и с четвертью скорости дЛя
двух питателей).
А9020
Кулачки 17 взаимодействуют с частью 19 рычага 11 для введения дополнительной модуляции внутри набора, g определенного барабаном 12.
Другими словами,кулачки 17 взаимодействуют только с теми рычагами 11, которые находятся в отключающем положении, т.е. ближе к поверхности ци- 10 линдра 1 и к кулачкам 17. Кулачок 17, взаимодействующий с рычагом 11 в точке 19, смещает рычаг 11 от цилиндра 1 и позволяет игле, снабженной селекторным упором 7 на толкателе на той 15 же высоте, что и отключающий рычаг, вернуться к работе эксцентриковыми кулачками.
Предлагаемый способ заключается в
том, что приводят все элементы, осу0
5
0
50
55
ществляющие отбор игл, в положение,, ближайшее к поверхности цилиндра во время каждого оборота цилиндра, и удерживают их в этом положении так, что они действуют в течение следующего полуоборота на те толкатели, которые должны быть отключены, при этом элемегггы воздействуют только на заранее выбранные толкатели, а остальные. отодвигаются. Удержание в отключающем положении осуществляется эле ;тромагнитными устройствами. Устройство, реализующее предлагаема;/ способ, обеспечивает по сравнению с известным электромагнитное
35 управление выбором игл на высокоскоростных кругловязал1,ных мапшнах без ограничений.
Устройство содержит множ.етво кулачков, вращающихся с той же угловой
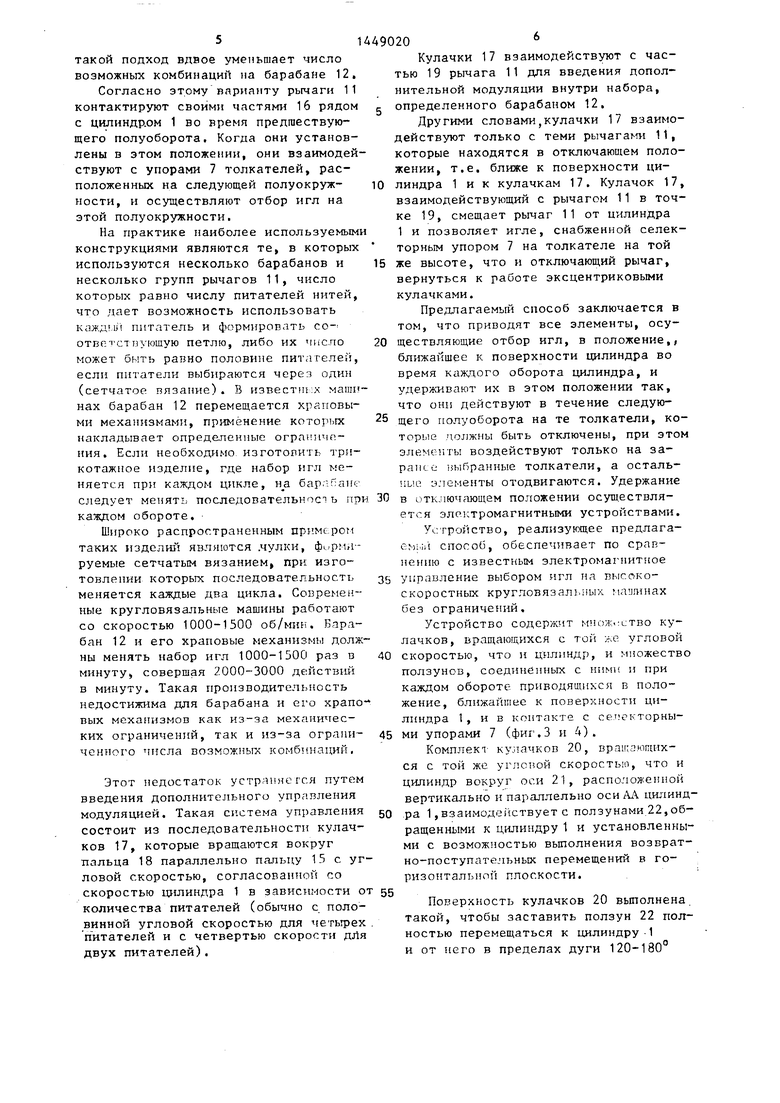
40 скоростью, что и цилиндр, и множество гголзунов, соединенных с ними и при каждом обороте приводящихся в положение, ближайшее к поверхности цилиндра 1, и в контакте с се.т;екторны45 ми упорами 7 (фиг.З и 4).
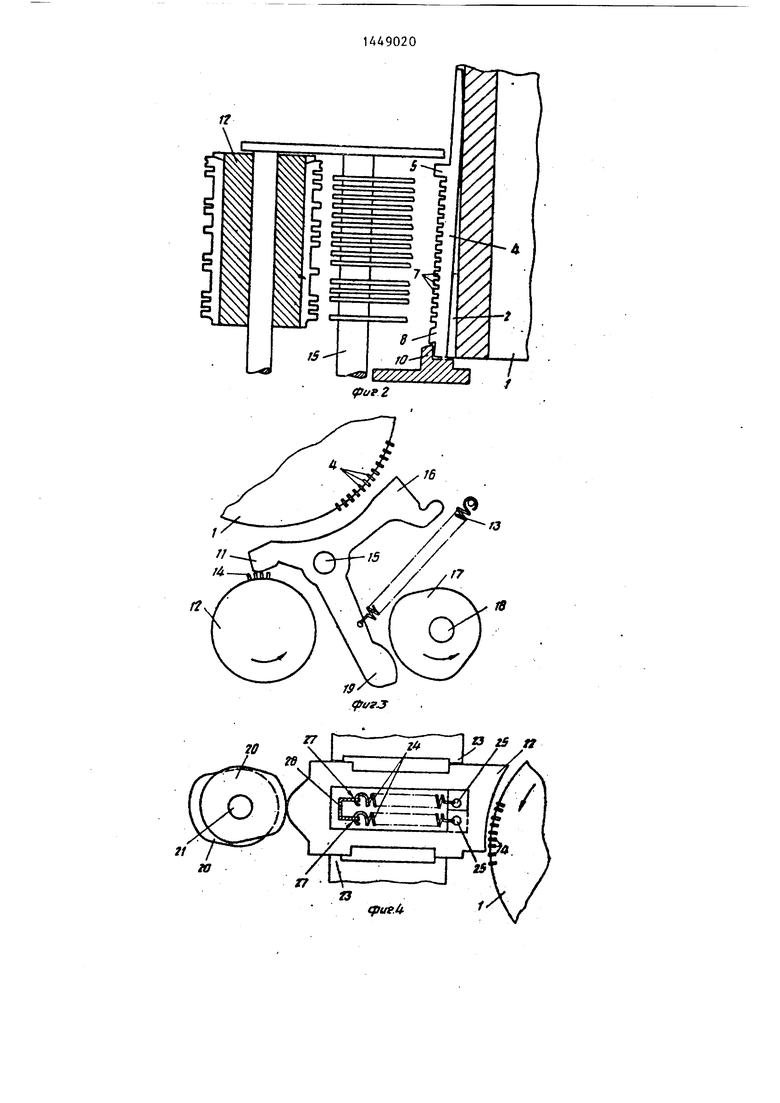
Комплек кулачков 20, врашзюпшх- ся с той же угловой скоростью, что и цилиндр вокруг оси 21, расположенной вертикально и параллельно оси АА цилинд- .ра 1,взаимодействует с ползунами.22,обращенными к цилиндру 1 и установленными с возможностью вьшолнения возвратно-поступательных перемещений в горизонтальной плоскости.
Поверхность кулачков 20 выполнена такой, чтобы заставить ползун 22 полностью перемещаться к цилиндру-1 и от него в пределах дуги 120-180°
вращения этого кулачка и, следователь
но, цилиндра, поскольку они вращаются с одинаковой угловой скоростью. Поверхность кулачков 20, которая затавляет ползуны 22 подходить к цилиндру 1, в своей высокой части разбита на три участка. Первый участок обеспечивает постепенное плавное соединение между сектором окружности малого радиуса и сектором окружности большего радиуса и представляет собой контур подвода ползуна. Второй участок проходит с постоянным радиусом, т.е. бо льшим радиусом, и представляет собой контур удержания ползуна в подведенном положении. Третий участок обеспечивает плавное соединение между сектором окружности большего радиуса и сектором окружности малого радиуса и образует контур отвода ползуна.
Таким образом, вся поверхность клачка разделена на следующие участк участок удержания в отведенном положении (180-240°), участок подвода (20-40), участок удержания в подведенном положении (70-130°), участок отвода (20-40°).
Первый из этих участок образует низкую зону поверхности, остальные три участка - высокую зону,
Ползуны 22 перемещаются в направляющих 23 и прижимаются к поверхности кулачка 20 пружинами или другими прижимными элементами. В варианте на фиг.З и 4 такое прижатие обеспечивается пружинами 24, соединенными с ползуном в участках 25, а с неподвижной частью машины 26 - в участках 27. Усилие пружины пропорционально массе ползуна и, следовательно невелико. Поэтому пружина не должна противодействовать давлению толкателей (как пружина 13 на
фиг.З), а просто обеспечивает контак между ползуном 22 и кулачком 20.
Группы ползунов 22 и кулачков 20 делятся в свою очередь еще на две группы, из которых одна управляет выбором на одной полуокружности, а другая - на другой. Эти две группы ползунов 22 попеременно подводятся к цилиндру и отводятся от него.
На фиг.З это деление показано как верхняя половина пакета, отведенная от цилиндра, и нижняя половина, подведенная к цилиндру. Через пол-оборо
0
5
та оси 21 этот порядок меняется. Таким образом выбор осуществляется в соответствии с требованием на полуокружности неработающих толкателей. Подводящий кулачок 20 не имеет упоров на половине оборота и толкает набор ползунов к цилиндру 1, в результате чего они подходят к цилиндру для осуществления выбора игл на следующем полуобороте, вводят в канавки те толкатели, у которых ес.ть упоры на той же высоте, что и ползун 22. Та часть ползуна 22, которая выступает по направлению к поверхности цилиндра и предназначена для прижима в канавки тех толкателей, которые должны быть отключены путем воздействия на их селекторные упоры, имеет
0 плавный профиль, который обеспечивает плавное взаимодействие с селекторными упорами и постепенное приложение давления, направленного внутрь. Согласно изобретению такое уст5 ройство подвода объединено с второй последовательностью элементов, которые либо удерживают, либо не удерживают ползуны 22 в подведенном положении так, что они либо входят, либо не входят в контакт с селекторными упорами 7 во время следующего полуоборота.
Други. -ш словами, все ползуны 22 выполнены с возможностью подхода к цилиндру 1 во время каждого оборота, но только часть из них выборочно удерживается в этом положении во время последующего после их подвода полуоборота для того, чтобы утопить требуемые толкатели в канавки и тем самым отключить их, тогда как остальные ползуны возвращаются в отведенное положение во время этого полуоборота и не взаимодействуют с толкателями.
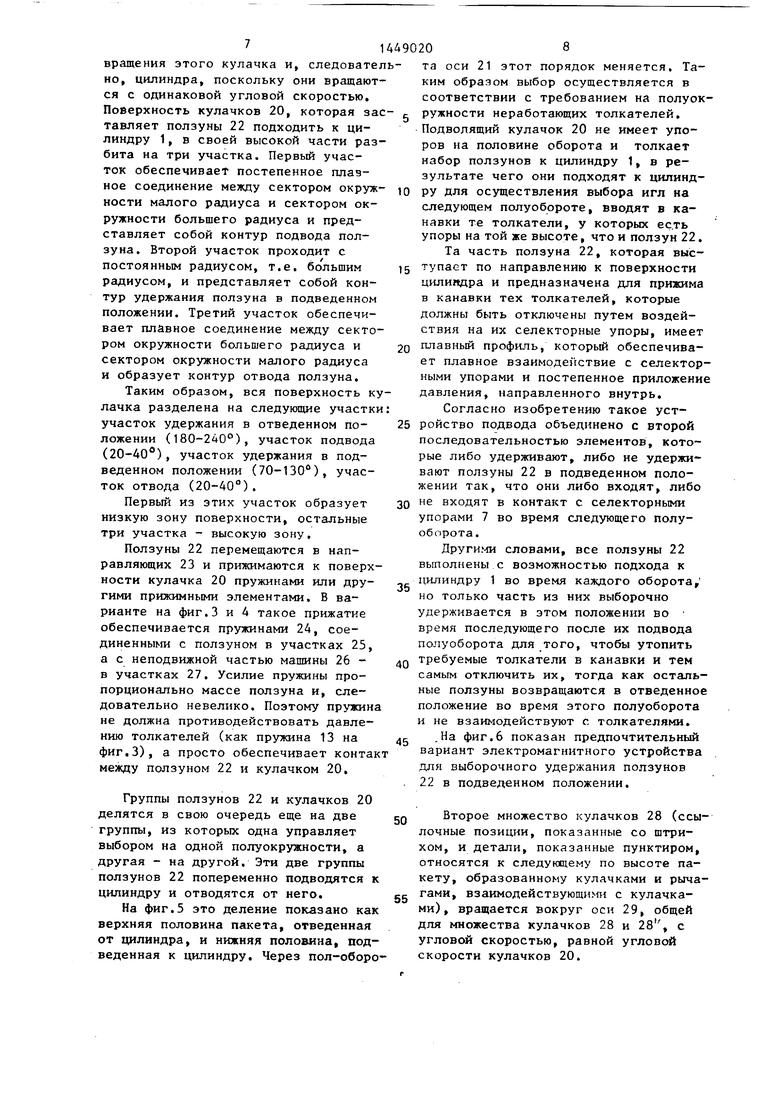
,На фиг.6 показан предпочтительный вариант электромагнитного устройства для выборочного удержания ползунов 22 в подведенном положении.
0
5
0
5
Второе множество кулачков 28 (ссылочные позиции, показанные со штрихом, и детали, показанные пунктиром, относятся к следующему по высоте пакету, образованному кулачками и рычагами, взаимодействующими с кулачками) , вращается вокруг оси 29, общей для множества кулачков 28 и 28, с угловой скоростью, равной угловой скорости кулачков 20.
9
Каждый кулачок 28 удерживается с помощью плоской пружины 30 в контакте на участке 31 с рычагом 32, который качается вокруг оси 33. Как показано на фиг.6, кулачок 28 имеет выступающую часть профиля, которая имеет гораздо меньшую угловую ширину, чем выступающие части профиля кулачков 20, поскольку весь цикл колебания рычага 32 должен проходить в пределах времени, в течение которого кулачок 20 обращает к ползуну 22 . свой профиль, образованный участком постоянного большего радиуса,
В варианте, показанном на фиг.6, оси симметрии кулачков 20 и 28 смещены на 90 .
При качании рычага 32 его конец 34 подходит к электромагниту 35 и отходит от него, в то время как противоположный конец 36 взаимодействует с ползуном 22.
Когда электромагнит включен, часть ЗА прижимается к нему и противоположная часть 36 зацепляется с ползуном 22 для удержания последнего в подведенном положении относительно цилиндра 1, не давая ему верпуть 10
15
20
25
Ю
35
ся назад, когда кулачок 20 поворачивается и подставляет ползуну CBci i низкий профиль.
Аналогично, когда электромагнит 35 включен, кулачок 28 больше не контактирует с участком 31 и продолжает вращаться, не оказывая воздействия, как и кулачок 20.
Когда электромагнит 35 отключается, пружина 30 возвращает участок 31 в контакт с кулачком 28 и освобож- 40 дает ползун от зацепления концом 36.
Рычаг 32 вновь начинает совершать колебательные движения вокруг оси 33, а ползун возвращается к возвратно-поступательным перемещениям.
Реактивное усилие, оказываемое тoлкaтeля ш, отключенными ползуном, гасится осью 33 через конец 36 рычага 32.
На фиг.6 показан вариант, в котором множество рычагов 32 и 32 вместе с прикрепленными и связанными с ними элементами расположены по обе стороны от прямой, соединяющей оси 21 и 29 так, чтобы между двумя соседними рычагами был эазор, равный двум шагам упора.
Пространство, доступное в вертикальном направлении в таком вариан1ДА9020-
те, позволяет установить электромагниты, не мешающие один другому.
Ползуны, оставляемые в положении подвода к поверхности цилиндра 1, и ползуны, которые возвраща отся в отведенное положение, выбираются путем включения jmmb требуемых электромагнитов в двух пакетах электромагнитов 35 и 35 .
Например, если включаются первый, седьмой и четырнадцатый электромагниты, то первый, седьмой и четырнадцатый ползуны останутся в положении подвода к цилиндру.
Запоминая последовательности выбора и время выбора на основании вычисления оборотов цилиндра в операционной памяти, установленной на машине, можно записывать такую информацию либо кнопочным вводом оператора, либо автоматически с магнитного носителя. Таким образом,
можно записывать и хранить данные о выборе д 1я различных изделий.
Тако; тип программирования позволяет получить практически неограни- ченное множество последовательностей и эти последовательности можно реплизовать, меняя выбор игл от ря- i:a к ряду.
ключ1;ние электромагнитов осутдест- .ля1-тся электрическими coeдI нeния ш с системой управления (не показаны).
Скорость, с которой можно -менять набор игл, на порядок выо1е, чем в случае известных барабанов, управляемых храповыми механизмами, и соответствует скорости вклю чсния маломощного электромагнита. 1 р 1К ически число возможных последовательностей выбора неограничено. Выбор игл может меняться при каждом ряде вязания даже при работе с высокой скоростью.
Проблемы трения и износа, вызываемые значительными нагрузками на пружину 13, удерживающую рычаги 11 в контакте с упорами толкателей, исключаются. Пружины 24 и 25 описанного варианта не должны прилагать значительных усилий, поскольку они используются только для обеспечения контакта между ползунами и рычагами и кулачками, а для этого достаточно уси- лие порядка 100 г. В отличие от этого для пруяин 13 требуется усилие порядка нескольких килограмм.
РабоТс:, связанная с подготовкой барабана 12 для каждого типа изделий
45
50
55
полностью исключается. Этот процесс теперь осуществляется простым ручным вводом модифицированных параметров, который осуществляет оператор, или вводом нового носителя в запоминающе устройство.
Устройство по изобретению имеет т преимущество, что в нем используются прямые рычаги, выполненные уменьшенными и массы которых при возвратно- поступательном перемещении уменьшены и их движение управляется вращающимися кулачками.
Электромагнитные запирающие ройства применяются только для удержания детали, к которой они обращены в положении подвода, осуществляемого кулачком, а не для притягивания этой детали. Полное кулачковое управление имеет точность движения и синхронизации, что позволяет увеличить скорост вращения цилиндра и повысить производительность.
Формула изобретения
1. Способ отбора игл кругловязаль- ной машины путем воздействия отключающих элементов на толкатели игл, при котором все селекторные пластины, вьтолненные с возможностью возвратно-поступательного дв гаения в плоскостях, перпендикулярных оси игольного цилиндра, подводят расположенными в одних плоскостях с ними кулачками, вращающимися с угловой скоростью игольного цилиндра к наружной поверхности игольного цилиндра, отобранные селекторные пластины удерживают в подведенном положении для отключения соответствующих им толкателей с пятками с помощью электромагнитных устройств, выступающими с наружной поверхности цилиндра, а остальные селекторные пластины отводят от иилипдра, отличающийся тем, что, с целью повышения надежности отбора, в период стадии подвода селекторных пластин к игoльнo ry цилиндру элементы, удерживающие селекторные пласти-, ны в подведенном положении, подводят к действующим выборочно управляющим устройствам, при атом селекторные пластины подводят к игольному цилиндру во время полупериода вращения игольного цилиндра, когда соответствующие подводным селекторным
пластинам толкатели расположены вне зоны взаимодействия с ними, а отключение этих толкателей соответствующими селекторными пластинами осуществляют в последующий пояупериод.
2.Способ ПОП.1, отличающийся тем, что выборочное отключение толкателей осуществляют
0 посредством электромагнитного управляющего устройства.
3.Устройство отбора игл кругловя- зальной машины, содержащее комплект селекторных пластин, установленных с
5 возможностью возвратно-поступательного движения в плоскостях, перпендикулярных оси игольного цилиндра, находящийся в постоянном контакте с отведенны ш селекторными пластина0 ми комплект подводящ11Х кулачков, расположенных в одних плоскостях с селекторными пластинами с возможностью вращения, средство удерживания селекторных пластин в подведенном к на5 ружной поверхности игольного цилиндра положения, отличающееся тем, что комплект подводящих кулачков выполнен в виде двух групп, при этом выступающие части кулачков одной
0 группы смещены на 180° относительно выступаюп;их частей кулачков другой группы.
4.Устройство по п.3, отличающееся тем, что выступаю5 щне части подводящих кулачков включают три участка, участок подведения селекторных пластин к игольному цилиндру, имеющий угловую протяженность 20-40°, участок удерживания в
0 подведенном положении, имеющий угловую протяженность 70-140, « участок отведения с угловой протяженностью 70-140 и y iacTOK отведения с угловой протяженностью 20-А0--,
5 при этом угловая протяженность всей выступающей части составляет 120- 180.
5.Устройство по пп.З и 4, о т - л и чающееся тем, что средство удерживания селекторных пластин в подведенном к наружной поверхности игольного цилиндра положении вьшолне- но в виде кo mлeктa рычагов, расположенных с возможностью поворота в одних плоскостях с селекторными пластинами, контактирующими с комплектом качающих кулачков, выполненных с возможностью вращения вокруг оси, параллельной оси подводящих кулачков
0
5
с одинаковой с ними угловой скоростью, при этом в крайнем положении поворота рычага один его конец взаимодействует с соответствующей селек- ториой пластиной, а другой - с электромагнитным управляющим средством.
6. Устройство по п.5, отличающее с я тем, что качающие ку- лачки имеют форму, аналогичную подводящим кулачкам, при этом их выступающие части имеют угловую протяженность меныяую чем угловая протяженность выступающих частей, подводящих кулачков и составляющую 70-140 .
7.Устройство по пп. 5 и 6, отличающееся тем, что оси симметрии контуров качающих и соответствующих им подводящих кулачков развернуты друг относительно друга
на 90°.
8.Устройство по пп.5-7, отличающееся тем, что комплект качающих кулачков, комплект поворотных рычагов и комплект запирающих электромагнитов выполнены в виде двух групп, симметрично расположенных с обеих сторон от линии, соединяющей оси качающих и подводящих кулачков.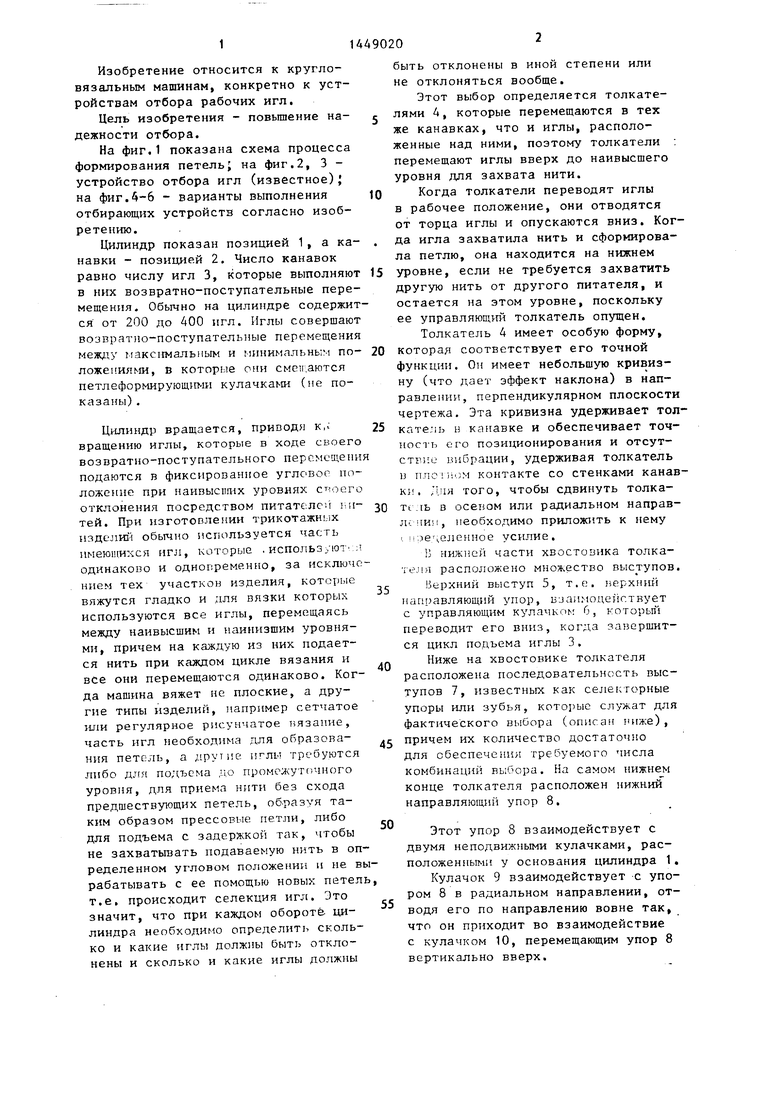

Изобретение относится к трикотажному производству, а именно к способам и устройствам отбора игл на кругловязальных машинах. Цель изобретения - повышение надежности работы устройства. Комплект ползунов вводят в контакт с селекторными упорами толкателей и удерживают в подведенном положении те ползуны, которые должны осуществлять отключение, позволяя остальным ползунам отойти. Отключение осуществляется через полуоборот после того, как был осуществлен подвод, при этом отбор осуществляется электромагнитными устройствами, срабатывание которыэ запрограммировано на каждый оборот машины. 2 с. и 6 з.п. ф-лы, 6 ил.
/
го
a
ufZ
tpuf.U
fpus.5
52 J5
10 , I 35
| РЕГУЛЯТОР РЕАКТИВНОЙ МОЩНОСТИ | 1993 |
|
RU2097824C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
