CD
Изобретение относится к текстильной промышленности, а именно к мате- |риаловедению, к разделу изучения |упругодеформационных характеристик нитейо
Цель изобретения - сокращение времени контроля за счет совмещения процесса контроля с процессом перемотки без нарушения целостности нити в бобине.
На фиг.1 показана конструктивная схема предлагаемого устройства и вид А; на фиг,2 и 3 - силы, действующие на рычаги рычажно-шарнирного механизма; на - схема перемещения элементов устройства.
Устройство (фиг,1) содержит верхний 1 и нижний 2 подвижные направляющие ролики и два неподвижных ролика 3 и 4 для прохождения через них нити 5 с бобины 6 на мотовило 7, электро- магнитньй зажим 8, состоящий из неподвижной колодки 9, подвижной с фигурными выступами 10, жестко связанный с ферромагнитным сердечником 11, взаимодействующим с катушкой 12, Силоизмеритель 13 состоит из лсон- сольно-закрепленной балочки 14, шар- нгирно соединенной с верхним роликом 1, подвижной опоры 15j электропривода 16 ее перемещения с кодовым вин- гом 17, Нижний ролик 2 укреплен на рычаге 18 рычажно-шарнирного механиз1449908 2
Устройство работает следующим образом
Исходное положение устройства - (фиг,1) подвижная опора 15 в. любом положении, арретир 33 фиксирует ры- чажно-шарнирный механизм в нейтральном положении, оставляя обе пары контактов 29 и 30 разомкнутыми; элек10 тромагнитньй зажим 8 открыт и свободно пропускает между своими колодками нить 5, нагружающий механизм находится в верхнем положении, груз 24 лежит на штырях 25, грузовая щадка 23 свободна.
По команде с программно-управляющего устройства (не показано) включается механизм перемоки нити 5 с бобины 6 на мотовило 7 с заданной ско20 ростью и заданными по количеству и по времени остановками для выполнения замеров. При остановке механизма перемотки включается катушка электромагнита и срабатывает электромагнит25 ный зажим, закре шяя набегающую (с бобины 6) и сходящую (на мотовило 7) ветви нити между неподвижной 9 и подвижной с фигурными выступами 10 колодками, образуя, таким образом,
30 замкнутый К9нтур нити, проходящий (фиг,1, вид А) от точки а через ролик 1 и 2 до точки б (фигурные выступы показаны штриховыми линиями)„ Сразу после срабатьюания электромагнит ia 9, состоящего из названного рыча-. ногр .зажима 8 арретцр 33 освобождает га 18, верхнего рычага 20 и тяги 21, рычажно-шарнирньй механизм и вклю- шарнирно соединяющей ir, и взаимодей- чает привод нагружающего механизма гтвует с нагружающим механизмом 22, 22, При этом груз 24 с заданной ско- :остоящим из грузовой п.пощадки 23 для ростью укладывается на грузовую пло- груза 24, трех штьфей 25, имеющих 0 зозможность вертикального перемещения от ходового винта 26 через зубчатуто ;iapy от электропривода 27. На верхнем ; ычаге 20 укреплена контактная скоба
щадку 23, в результате чего указанный контур участка нити удлиняется под действием растягивающего усилия от груза 24, и одна из пар контактов (29 или 30) замыкается, включая
JO„ „ , i-u-4.4i%asii у,л , ЯЛЛЮЧа
.8 с верхней парой 29 и нижней парой электропривод 16 перемещения опоры
30 контактов, имеющих возможность взаимодействия с балочкой 14.
Для визуального отсчета измеряемой величины служит шкала 31 с указателем 2, жестко укрепленным на подвижной Опоре 15, предусмотрено взаимодейст- зше опоры 15 с реохордом для обеспечения автоматической записи измеряе- ой на регистрирующем устройстве (не указано) , Устройство снаб- я|:ено арретиром 33 для фиксации рычажно-шарнирного механизма в нейтраль-, |1ом положении.
15,
Возможны два варианта продолжения работай В первом случае оказывается замкнутой верхняя пара контактов 29 (это значит, что усилие, возникающее в нити, недостаточно для. упругого противодействия, возникшего в балочке,.для размыкания . контактов). Вследствие этого привод 16 через замкнутую пару 29 включается на перемещение опоры влево, т,е, на уменьшение жесткости балочки Вс втором случае окажется замкнутой нижняя пара 30 и привод 16 включитногр .зажима 8 арретцр 33 освобождает рычажно-шарнирньй механизм и вклю- чает привод нагружающего механизма 22, При этом груз 24 с заданной ско- ростью укладывается на грузовую пло-
щадку 23, в результате чего указанный контур участка нити удлиняется под действием растягивающего усилия от груза 24, и одна из пар контактов (29 или 30) замыкается, включая
, i-u-4.4i%asii у,л , ЯЛЛЮЧа
электропривод 16 перемещения опоры
электропривод 16 перемещения опоры
15,
Возможны два варианта продолжения работай В первом случае оказывается замкнутой верхняя пара контактов 29 (это значит, что усилие, возникающее в нити, недостаточно для. упругого противодействия, возникшего в балочке,.для размыкания . контактов). Вследствие этого привод 16 через замкнутую пару 29 включается на перемещение опоры влево, т,е, на уменьшение жесткости балочки Вс втором случае окажется замкнутой нижняя пара 30 и привод 16 включитмежду осями верхнего и нижнего рол ков.
1f
,
T.e.,
где л1 - удлинение исследуемого участка нити - ее двух ветвей,, при этом условно полагаем, что участки нити, лежащие на роликах, удлинени не подвергаются.
Если через « обозначить жесткос балочки, то ее прогиб
f c/ Qo(1)
С другой стороны, удлинение нити
(2)
41 И1
где
ся на перемещение опоры 15 вправо, т.е. на увеличение жесткости балочки. В обоих случаях перемещение опоры 15 осуществляется до тех пор, пока обе пары контактов 29 и 30 не окажутся разомкнутыми, опора 15 остановится, исчезнет усилие в тяге 21 и указатель 32 покажет по шкале 31 величину деформированной жесткости ,о исследуемого участка нити. В дальнейшем при релаксации усилия в исследуемом участке нити силоизмеритель автоматически обеспечивает разомкнутое положение обеих пар контактов, а указатель 32 показывает по шкале 31 изменение деформированной жесткости во времени. По истечении запрограммированного времени замер груза 24 снимается с плоо1адки 23, произ- 20 водится арретирование рычажно-шар- нирного механизма, раскрывается электромагнитный зажим, включается перемотка до следую1чего замера.
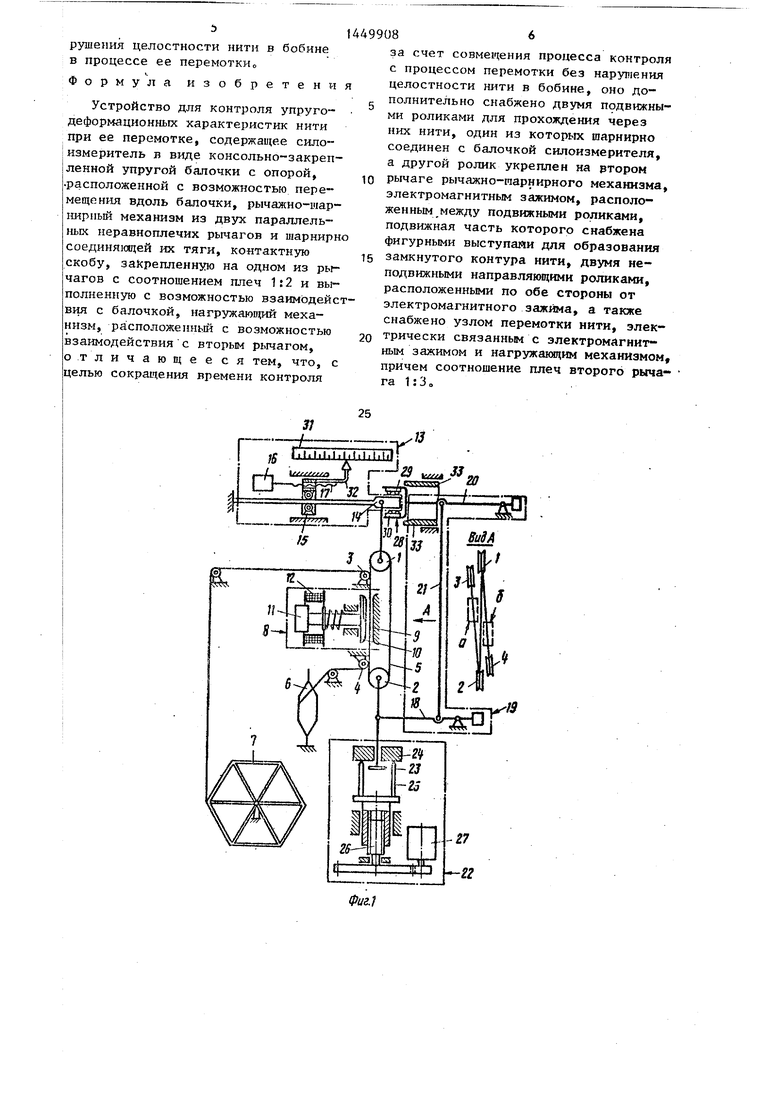
Связь деформационной жесткости 25 образца и жесткости балочки может быть пояснена рассмотрением условия равновесия рычагов 18 и 20 под действием приложенных к ним сил при наткГ ити исследуемого учас- зо Если Т О, то Q N, следовательно
тка нити и ее удлинении. На рычаг 20
действуютсилы (фиг.2): R - реакция
в опорном шарнире; N - усилие в нити;
Q - сила упругости, возникшая в балочке при ее прогибе; Т - усилие в
тяге 21 о
Уравнение равновесия рычага 20: (Q - 2N) при
На рычаг 18 действуют силы (фиг.З): К j - реакция в опорном шарнире; N - усилие в нити; Т - усилие в тяге 21; Р - масса груза 24.
Уравнение равновесия рычага 18:
(2N-P) 3 Т при Р 2N.
1 - длина исследуемого участк Е - релаксационный модуль; F - площадь поперечного сечения нити
Но поскольку i), то приравнивая (1) и (2), получаем
cTQ
Ё;Г
Тое,
f при
35
40
деформационная жесткость нити равна жесткости балочки. Поскольку при испытаниях удлинение нити составляет не более 1-2%, величину l/F Можно принять постоянной и тогда
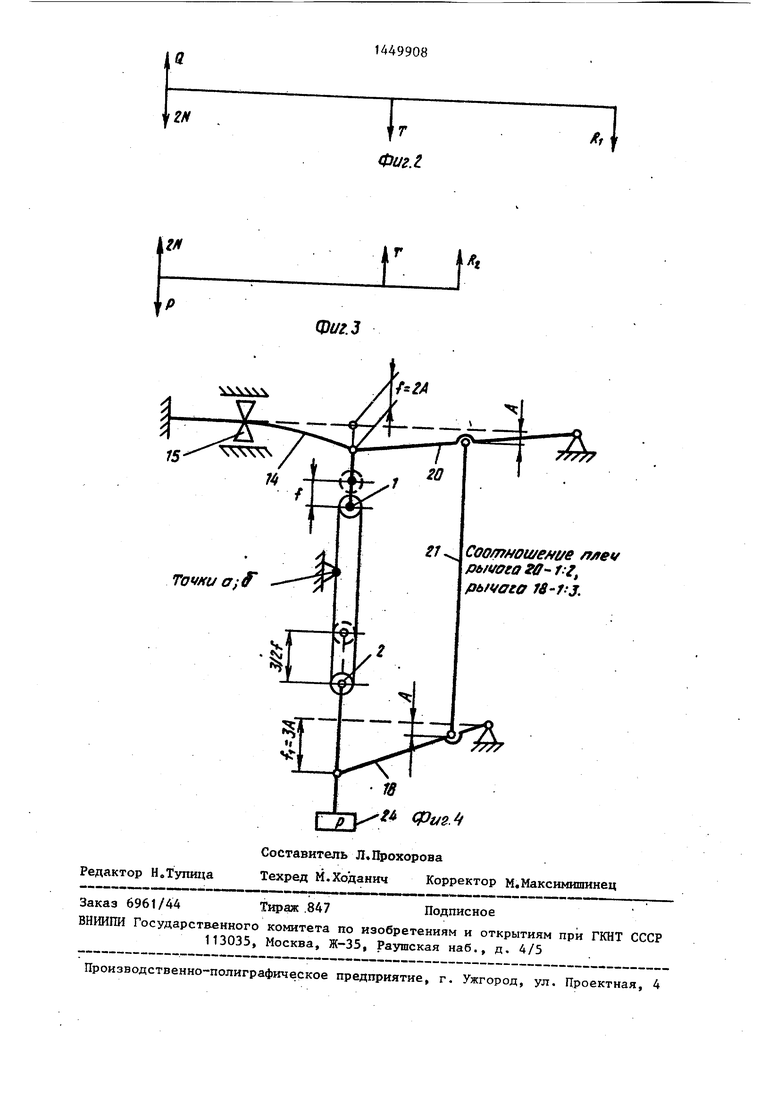
/ С Следовательно, при Т О, . Далее рассмотрим удлинение исследуемого участка нити (фиг.4). Под действием груза Р оба рычага 18 и 20 повернутся относительно опорных шарниров-, при этом перемещение левого конца верхнего рычага 20 (равного по величине прогибу балочки) будет равно f 2 А, а перемещение левого конца нижнего рычага 18 (равное по величине перемещению ролика 2) будет равНо жесткость балочки - функция ее вылета, откуда вытекает зависимость деформационной жесткости нити
Ё- ° положения опоры, .определяю щей вылет, что и дает возможность градуировки шкалы по положению подвижной опоры.
Использование предлагаемого устройства обеспечивает по сравнению с известным преимущество, заключающееся в точ, что с помощью прямых измерений контролируется упругодефор- мационная характеристика - деформ а50
-irirxc .сремещеиию ролика ) оудет рав- мационная характеристика - дефор Hof,3A, где А - перемещение тяги 21, ционная жесткость нити, наиболее соединяющей рычаги (ввиду малости полно соответствующая характеру перемещений дуги заменены участками прямых), Отсюда увеличение расстояния
механических воздействий в процессе эксплуатации и переработки, без намежду осями верхнего и нижнего роли- ков.
1f
,
T.e.,
где л1 - удлинение исследуемого участка нити - ее двух ветвей,, при этом условно полагаем, что участки нити, лежащие на роликах, удлинению не подвергаются.
Если через « обозначить жесткост балочки, то ее прогиб
f c/ Qo(1)
С другой стороны, удлинение нити
(2)
41 И1
где
1 - длина исследуемого участка; Е - релаксационный модуль; F - площадь поперечного сечения нити
Но поскольку i), то приравнивая (1) и (2), получаем
cTQ
Ё;Г
Тое,
f при
35
деформационная жесткость нити равна жесткости балочки. Поскольку при испытаниях удлинение нити составляет не более 1-2%, величину l/F Можно принять постоянной и тогда
40
/ С Но жесткость балочки - функция ее вылета, откуда вытекает зависимость деформационной жесткости нити
Ё- ° положения опоры, .определящей вылет, что и дает возможность градуировки шкалы по положению подвижной опоры.
Использование предлагаемого устройства обеспечивает по сравнению с известным преимущество, заключающееся в точ, что с помощью прямых измерений контролируется упругодефор- мационная характеристика - деформ а50
мационная характеристика - дефор ционная жесткость нити, наиболее полно соответствующая характеру
мационная характеристика - дефор ционная жесткость нити, наиболее полно соответствующая характеру
механических воздействий в процессе эксплуатации и переработки, без нарушения целостности нити в бобине в процессе ее перемотки
Формула изобретен и
я
Устройство для контроля упруго- . деформационных характеристик нити при ее перемотке, содержащее сило- измеритель в виде консольно-закреп- ленной упругой балочки с опорой, -расположенной с возможностью перемещения вдоль балочки, рычажно-шар- нирный механизм из двух параллельных неравноплечих рычагов и шарнирно соединяющей их тяги, контактную скобу, закрепленную на одном из рычагов с соотношением плеч 1:2 и выполненную с возможностью взаимодействия с балочкой, нагружаюп ий механизм, расположенной с возможностью взаимодействия с вторым рычагом, отличающееся тем, что, с целью сокращения времени контроля
10
14499086
за счет совмещения процесса контроля с процессом перемотки без нарушения целостности нити в бобине, оно дополнительно снабжено двумя П9Движны- ми роликами для прохождения через них нити, один из которых шарнирно соединен с балочкой силоизмерителя, а другой ролик укреплен на ртором рычаге рычажно-иарнирного механизма, электромагнитным зажимом, расположенным между подвижными роликами, подвижная часть которого снабжена фигурными выступами для образования замкнутого контура нити, двумя неподвижными направляющими роликами, расположенными по обе стороны от электромагнитного зажима, а также снабжено узлом перемотки нити, элек- 20 трически связанным с электромагнитным зажимом и нагружаннцим механизмом, причем соотношение плеч второго рычага 1 : 3
15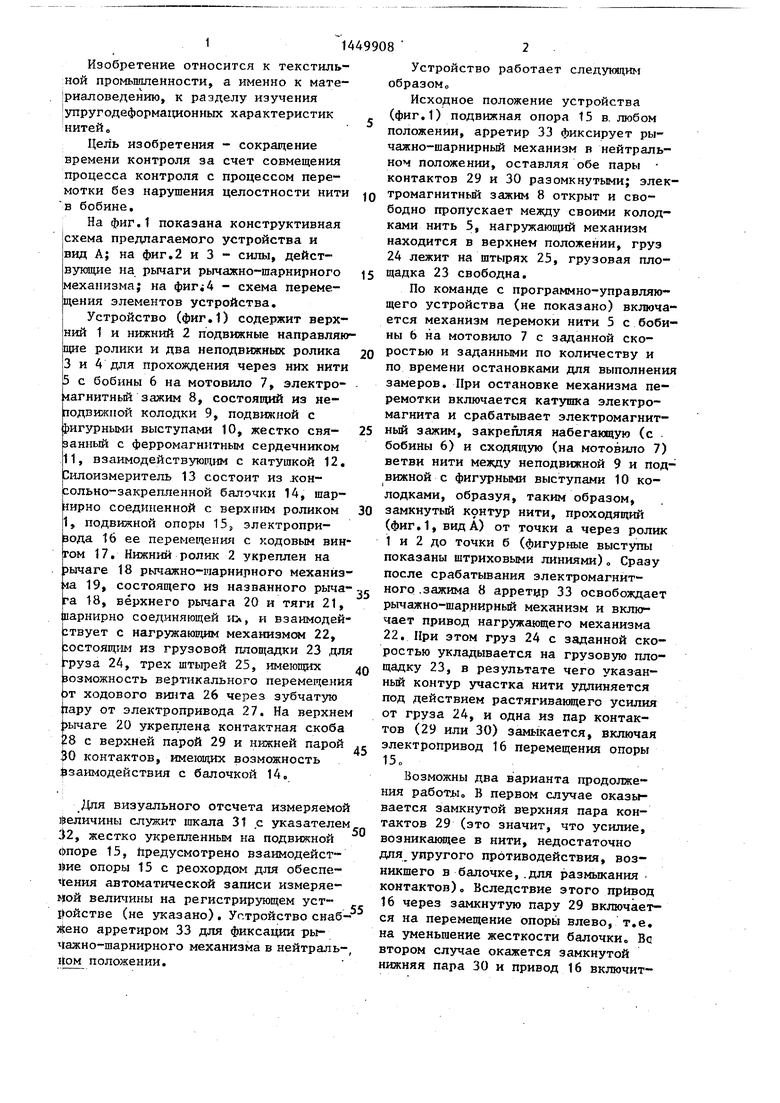

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания образцов материалов на растяжение | 1981 |
|
SU1026034A1 |
| УСТРОЙСТВО ДЛЯ РАСКРОЯ МАТЕРИАЛА | 1991 |
|
RU2015231C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕОЛОГИЧЕСКИХ СВОЙСТВ СНЕЖНОГО ПОКРОВА | 2008 |
|
RU2396539C2 |
| Установка для перематывания основныхНиТЕй | 1979 |
|
SU848491A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ | 1994 |
|
RU2083465C1 |
| Автомат для перемотки пряжи и ниток в мотки | 1957 |
|
SU115224A1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2003 |
|
RU2236673C1 |
| Многопозиционная машина для бесшвейного скрепления книжных блоков | 1989 |
|
SU1671474A1 |
| КИНОПРОЕКТОР | 1971 |
|
SU301006A1 |
| Высоковольтный аппарат | 1980 |
|
SU943894A1 |
Изобретение относится к текстильной промьшленности, а именно к материаловедению, к разделу излучения упругодеформационных характеристик нитей. Цель изобретения - сокращение времени контроля за счет совмещения процесса контроля с процессом перемотки без нарушения ее целостности в бобинео Эта цель достигается тем, что в устройстве используется две пары подвижных и неподвижных направляющих роликов и электромагнитньй зажим с фигурными выступами на его подвижной части для образования замкнутого контура пропускаемой через устройство нити. Подвижные ролики соединены с рычажно- . шарнирным механизмом и силоизмери- телем для растяжения замкнутого контура нити при замере. Механизм перемотки злектрически qвязaн с электромагнитным зажимом и нагружающим механизмом. Причем соотношение плеч одного из рычагов, взаимодействующего с нагружающим механизмом, 1:3. 4 ил. ш (Л
31
-DtzziizziizrK
;5 цЫ iJ 111111111111 (IГ
PW/i x / / l/Т I
/ -
/J
28
3
2/
3
ю
5
г
±жШ
-27
гг
Фиг.З
TOVf(U Off
1 49908
Фиг.1
21 J Соо/7 / ошем1/е ffb/voeoiO-r.-z, Pbit/aea fS-f-j.
| Устройство для испытания образцов материалов на растяжение | 1981 |
|
SU1026034A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
