Фш.1
fO
15
20
1450062
Изобретение относится к электротехнике, а, именно к области управления электроприводами с подчиненным регулированием параметров, и может найти применение в электроприводах механизмов, работающих в условиях частых ускорений и замедлений, например в электроприводах графопостроителей.
Цель изобретения - повьшение .быстродействия как при изменяющемся, так и неизменном входном сигнале в случае отсутствия в составе регулятора скорости интегрирующего звена.
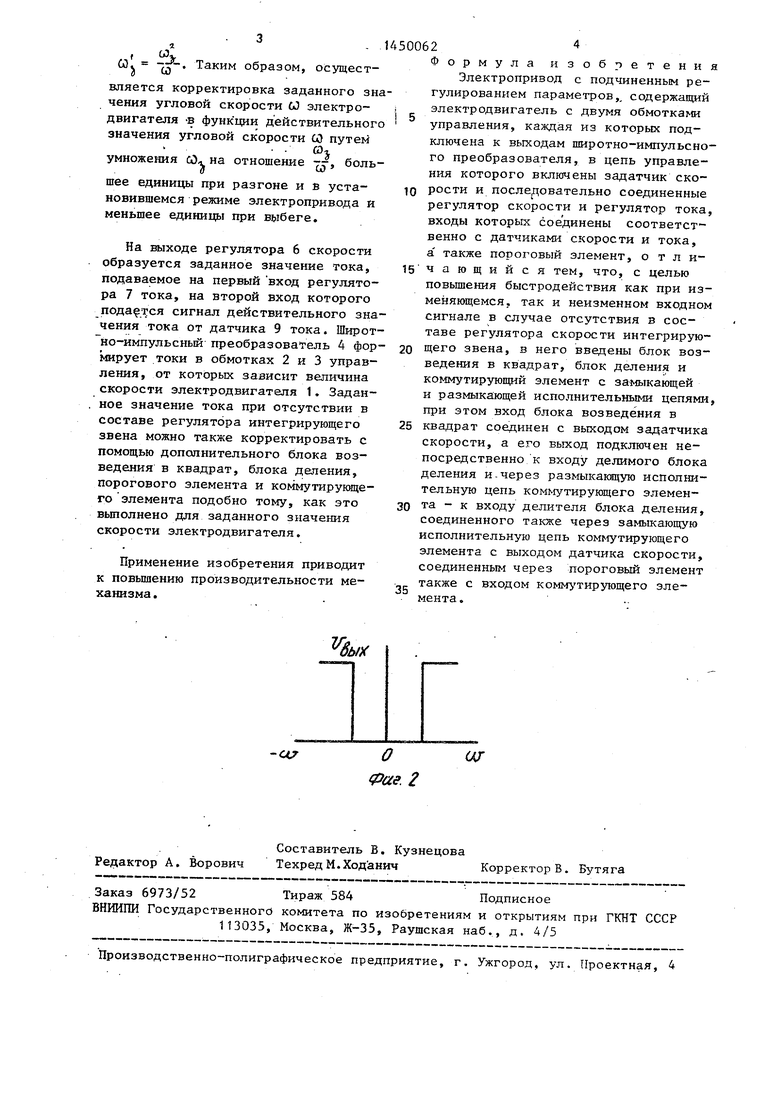
На фиг. 1 изображена функциональная схема электропривода; на фиг.2- характеристика порогового элемента.
Электропривод (фиг. 1) .содерлшт эттектродвигатель1 с двумя обмотками 2 и 1 управления, каждая из которых подключена к выходам широтно-им,- ... пульсного преобразователя 4, в цепь управления которого включены задат- чик 5 скорости и последовательно соединенные регултор 6 скорости и регулятор 7 тока, входы которьк соединены соответственно с датчиками 8 и 9 скорости и тока, а также порого- вьш элемент 10. Кроме того, электро- привод содержит блок П возведения- в квадрат, блок 12 деления и комму- тирующий элемент 13 с замыкающей 14 и размыкающей 15 исполнительными це- пяг.ш, при этом вход блока 11 возве- дения в квадрат соединен с выходом задатчика 5 скорости, а его выход подключен непосредственно .к входу делимого блока 12 деления и через размыкающую исполнительную цепь ком- мутирующего элемента 13 - к входу елителя блока 12 деления, соединен- ные также через замыкаюп1ую исполнительную цепь 14 комму -ирзпощего эле- мента 13с выходом датчика 8 скорос- Tji, сое,циненным через пороговый : элемент 10 также с входом коммут - ующего элемента 13.
.Электропривод работает следующим бразом.
Сигнал задания « на входе регуятора 6 скорости электродвигателя т задатчика 5 скорости формируется соответствии с выражением
УГ на ци не ра
по вод меж зна на, счи чин для че 25 пос
30
35
где
в н при тан 0 быс элек таве кнцег го с мощь и бл опер моме вход деле д5 вели НИН вите дост ной 50 элем выхо Сраб сраб та 1 цепе теля порци элект лятор
гл J со, -. г т
5 со
.C.0j
со,
ы У
заданное значение угловой скорости электродвигателя
fO
5
0
на выходе задатчика скорости;
U - действительное значение yr-i ловой скорости электродвигателя на выходе датчика 8 скорости.
Умножение заданного значения р,- УГЛОВОЙ скорости электродвигателя на отношение - имеет целью коррекцию задающего воздействия по отклонению регулируемой величины со при и замедлении электропривода.
Расчет в относительных единицах показывает, что в конце разгона привода при СО 1 исо 0,95 разность между заданным о, и действитепьнымй) значениями регулируемой величины на, входе регулятора скорости, подсчитанная по формуле, составит величину л со , примерно вдвое больщую для тех же значений со, иЪ при подаче сигнала с задатчика скорости не- 5 посредственно на вход регулятота,т.е, йСО 0,1| ло 0,05} Ди 2ЛСО.
30
35
гдеасо Wi -со.
Это же соотношение сохраняется и в н ачале замедления электропривода при Q 0,95; со 1, а также в установившемся режиме при cai. 1 со 0,98, что приводит к повьщ1ению быстродействия системы управления электропривода при отсутствии в составе регулятора скорости интегриру- кнцего звена. Реализация приведенного соотношения осуществляется с помощью блока 11 возведения в квадрат и блока 12 деления. Для исключения операции деления на ноль в первый момент разгона электропривода на входы делимого и делителя блока 12 деления подаются сигналы одинаковой д5 величины с выхода блока 11 возведе- НИН в квадрат до тех пор, пока действительное значение скорости. cD не достигнет, величины, определяемой зоной нечувствительности порогового 0 элемента 10 (характеристика вход - выход порогового элемента на фиг.2). Срабатывание последнего приводит к срабатыванию коь5мутируюй(его элемента 13, переключению исполнительных . цепей 14 и 15 и подаче на вход Afejm- теля блока 12 деления сигнала, пропорционального угловой .скорости электродвигателя 1. На входе регулятора 6 скорости появляется сигнал
5
СО
2
CO
Таким образом, осуществляется корректировка заданного зн чения угловой скорости U электродвигателя -в функ ции действительног значения угловой ск орости СО путем
CD,
умножения СО- на отношение , большее единицы при разгоне и в установившемся режиме электропривода и меньшее единицы при выбеге.
На выходе регулятора 6 скорости образуется заданное значение тока, подаваемое на первый вход регулятора 7 тока, на второй вход которого подается сигнал действительного зна чения тока от датчика 9 тока. Широт но-импульсный преобразователь 4 формирует токи в обмотках 2 и 3 управления, от которых зависит величина скорости электродвигателя 1. Заданное значение тока при отсутствии в составе регулятора интегрирующего звена можно также корректировать с помощью дополнительного блока возведения в квадрат, блока деления, порогового элемента и коммутирующего элемента подобно тому, как это вьтолнено для заданного значения скорости электродвигателя.
Применение изобретения приводит к повышению производительности механизма.
500624
Формула изобретения
Электропривод с подчиненным регулированием параметров,, содержащий j электродвигатель с двумя обмотками управления, каждая из которых подключена к выходам широтно-импульсно- го преобразователя, в цепь управления которого включены задатчик ско- 10 рости и последовательно соединенные регулятор скорости и регулятор тока, входы которых соединены соответственно с датчиками скорости и тока, а также пороговый элемент, о т л и- 15 чающийся тем, что, с целью повьшения быстродействия как при изменяющемся, так и неизменном входном сигнале в случае отсутствия в составе регулятора скорости интегрирую- 20 щего звена, в него введены блок возведения в квадрат, блок деления и коммутирующий элемент с замыкающей и размыка:ющей исполнительными цепями, при этом вход блока возведения в 25 квадрат соединен с выходом задатчика скорости, а его выход подключен непосредственно к входу делимого блока деления и.через размыкающую исполнительную цепь коммутирующего элемен- 30 та - к входу делителя блока деления, соединенного также через замыкающую исполнительную цепь коммутирующего элемента с выходом датчика скорости, соединенным через пороговый элемент 2g также с входом комм тирующего элемента.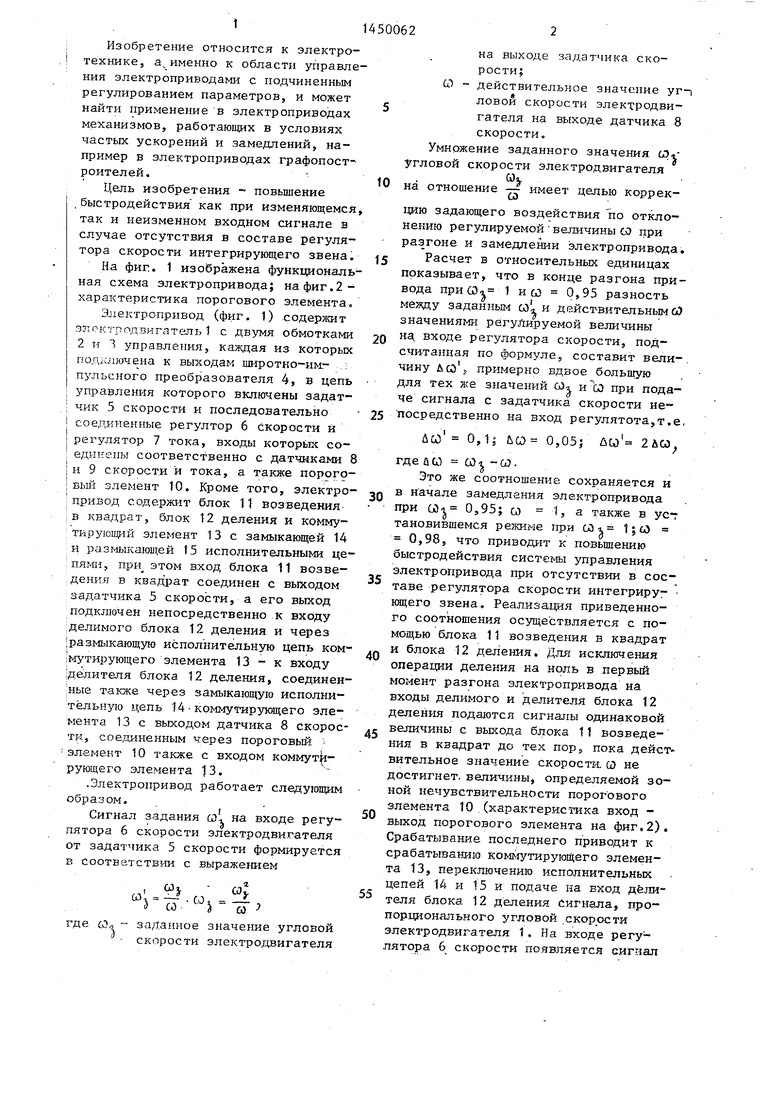
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1988 |
|
SU1539947A2 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1986 |
|
SU1347139A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Регулируемый электропривод угольного комбайна | 1989 |
|
SU1795096A1 |
| Позиционный электропривод | 1984 |
|
SU1228210A1 |
| Устройство для тепловой защиты электродвигателя | 1978 |
|
SU720611A1 |
Изобретение относится к электротехнике и может найти применение в механизмах, работающих в условиях частых ускорений и замедлений. Целью изобретения является повьше- ние быстродействия как при изменяющемся, так и при неизменном входном сигнале в случае отсутствия в составе регулятора скорости интегрирующего звена. Устройство содержит бло к 11 возведения в квадрат, вход которого соединен с выходом задатчи-: ка 5 скорости. Выход блбка 11 подключен непосредственно к входу делимого блока 12 деления и через размыкающую исполнительную цепь 15-к входу делителя блока 12 деления. Датчик скорости 8 через замыкающую цепь 14 соединен с входом делителя блока 12 деления. В данном устройстве срабатывание коммутирующего эле-- мента 13 позволяет формировать на входе регулятора 6 скорости задающий сигнал, учитывающий рассогласование между заданным и действительным знат чениями скорости электродвигателя 1.2 ил. г (Л с
-Ct
О Фае. 2
от
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1239819A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
