полнительных контуров положения, соединенных по принципу подчиненного регулирования. При этом режим торможения при рассогласованиях по положению, превышающих заданное значение
Изобретение относится к пози1№1он- ньгм электроприводам постоянного тока, выполненным по принципу подчиненного регулирования, и может быть использовано в электроприводах, вьшолняющих перемещение рабочих органов на заданную величину, в которых монотонный характер процесса позиционирования при условии наиболее быстрой допустимой отра,ботки заданного перемещения является необходимым условием технологического процесса, например, в электроприводе нажимных винтов прокатного стана.
Цель изобретения - повьш ение точности регулирования положения при наличии статической нагрузки на валу электродвигателя.
На чертеже изображена функциональная схема электропривода.
Позиционный электропривод содержит электродвигатель 1 постоянного тока, подключенный к регулируемому преобразователю 2, в цепь управления которого включены последовательно соединенные блок 3 задания перемещения и блок 4 сравнения, а также регулятор 5 положения с параболической характеристикой, пропорциональный регулятор 6 скорости и регулятор 7 тока, при этом второй вход блока 4 сравнения и входы регуляторов 6 и 7 скорости и тока соединены соответственно с датчиками 8, 9 и 10 положения, скорости и тока якоря. Электропривод также содержит блок 11 вычисления начального задания скорости, коммутирующий элемент с двумя замыкающими и двумя размыкающими исполнительными цепями и последовательно соединенные интегральный (И) регулятор 12 положения, сумматор 13 и пропорциональный (П) рег улятор 14 положения, причем выход блока 4 сравнения соединен с упранлянидей це.п.ью 15 коммутирующего
формируется нелинейным регулятором положения 5 со смещенной параболической характеристикой с ограничением выходной величины при постоянном замедлении, 1 ил.
элемента, через первую размыкающую цепь 16 коммутирующего элемента - с входом регулятора 5 положения с параболической характеристикой и через
его первую замыкающую цепь 17 - с входом И-регулятора 12 положения, второй вход сумматора 13 соединен с выходом блбка 11 вычисления начального задания скорости, входы которого подключены к выходу регулятора 5 полов:ения с параболической характеристикой и через вторую размыкающую цепь 18 коммутирукщего элемента - к выходу датчика 8 положения, соединенного также с входом П-регулятора 14 положения, выход которого через вторую замыкающую цепь 19 коммутирующего элемента соединен с задающим входом регулятора 6 скорости,
Блок 11 вычисления начального задания скорости может быть выполнен в виде последовательно соединенных сумматора и интегратора, в цепь обратной связи которого включена размыкающая цепь упомянутого коммутирующего элемента.
Сущность изобретения состоит в том, что режим торможения электропривода при рассогласованиях по положению, превьппающих выбираемое малое рассогласование, формируется нелинейным регулятором положения со смещенной параболической характеристи- 1СОЙ с ограничением выходной величины. При этом торможение привода осуществляется при постоянном замедлении. При достижении выбранного малого рассогласования нелинейный регулятор положения в результате срабатывания коммутирующего элемента исключается из структуры регулирования, и в дальнейшем режим торможения привода формируется регулятором положения, обра- ЗУЮЩИ1М два дополнительных контура по
ложения, соединенных по принципу подчиненного регулирования.
При этом внутренний контур содержит П-регулятор 14, а внешний - И-ре- гулятор 12 положения. Настройки обоих регуляторов вьтолняются из условия обеспечения монотонного характера процесса позиционирования в линейно структуре, т.е. не имеющей ограничений по току и скорости.
В момент переключения на выходе И-регулятора 12 положения внешнего дополнительного контура положения должен быть сигнал, задаваемый бло- кбм 11 вычисления начального задания скорости, такой величины, чтобы якорный ток в момент переключения не менялся .
Устройство работает следующим образом.
Выходной сигнал За с блока 3 задания сравнивается с выходным сигналом S датчика 8 положения, и получающийся в результате сигнал рассогласования по положению iS поступает на управляющий вход 15 коммутирукщего элемента, где сравнивается с сигналом уставки д Sff .
При рассогласованиях по положению, меньших сигнала уставки ((,) сигнал рассогласования через размыкающую цепь 16 коммутирующего элемента поступает на нелинейный регулятор 5 с параболической характеристикой, выходной сигнал которого в качестве задающего сигнала поступает на вход ре- .гулятора 6 скорости. Одновременно выходной сигнал нелинейного регулятора 5 с параболической характеристикой подается на первый вход блока 11 вычисления начального задания скорости, на второй вход которого через размыкающую цепь 18 коммутирующего элемента поступает сигнал с выхода датчика 8 положения. В блоке 11 вычисления начального задания скорости рассчитывается и запоминается сигнал задания начальных условий для И-регулятора 12 положения. Как только сигнал рассогласования по положению д8 станет меньше или равен сигналу уставки ASg, срабатывает комму- тирую 1щй элемент. В результате размыкающая цепь 16 коммутирующего элемента отключает нелинейный регулятор 5 и одновременно перестает поступать сигнал на первый вход блока 11 вычисле)1ия начального задания скорос28210
ти, второй вход которого отключается размыкающей цепью 18. На выходе блока 11 вычисления начального задания скорости запоминается величина 5 начального задания для И-регулятора 12 положения на момент переключения.Одновременно с отключением нелинейного регулятора 5 замыкающие цепи 17 и 19 коммутирующего элемента подключают
10 И-регулятор 12 и П-регулятор 14 положения. В дальнейшем сигнал рассогласования по положению поступает на вход И-регулятора 12 положения. Выходной сигнал И-регулятора 12 поло15 жения суммируется с сигналом задания начальных условий с выхода блока 11 вычисления начального задания скорости, и полученный результат сравнивается с выходным сигналом датчи20 ка 8 положения. Результат сравнения поступает на вход П-регулятора 14 положения, выходной сигнал которого в качестве задающего сигнала поступает на вход регулятора 6 скорости.
5 Изобретение обеспечивает увеличение производительности позиционных механизмов при работе со статической нагрузкой на валу электродвигателя при условии обеспечения монотонного
Q характера процесса позиционирования без установившейся ошибки по положению за счет повышения точности позиционирования при одновременном минимуме времени отработки заданного перемещения, а также повьтает их изно5
соустойчивость при наличии люфтов.
Формула изобретения
Позиционный электропривод, содержащий электродвигатель постоянного тока, подключенный к регулируемому преобразователю, в цепь управления которого включены последовательно
соединенные блок задания перемещения и блок сравнения, а также регулятор положения с параболической характеристикой, пропорциональный регулятор скорости и регулятор тока, при этом
второй вход блока сравнения и входы регуляторов скорости и тока соединены соответственно с датчиками положения, скорости и тока якоря, отличающийся тем, что, с целью повышения точности регулирования положения при наличии статической нагрузки на валу электродвигателя, в него введены блок вычисления началь-
5 1228210 6
кого задания скорости, коммутирующийния, второй вход сумматора соединен элемент с двумя замыкающими и двумяс выходом блока вычисления начально- размыкающими исполнительными цепямиго задания скорости, входы которого и последовательно соединенные интег-подключены к выходу регулятора поло- ральный регулятор положения, сумма-5 жения с параболической характеристи- тор и пропорциональньй регулятор по-кой и через вторую размыкающую цепь ложения, причем выход блока сравнениякоммутирующего элемента - к выходу соединен с управляющей цепью коммути-датчика положения, соединенного так- рующего элемента, через первую размы-же с входом пропорционального регу- кающую цепь коммутирующего элемента -ю лятора положения, выход которого че- с входом регулятора положения с па-рез вторую замыкающую цепь раболической характеристикой и черезкоммутирующего элемента соединен его первую замыкающую цепь - с вхо-с задающим входом регулятора дом интегрального регулятора положа-скорости.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1988 |
|
SU1539947A2 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Устройство для управления приводом | 1978 |
|
SU796794A1 |
| Электропривод с подчиненным регулированием параметров | 1985 |
|
SU1297202A1 |
| Система управления электроприводом | 1979 |
|
SU842707A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Устройство для управления позиционным электроприводом | 1977 |
|
SU714352A1 |
| Позиционный электропривод | 1988 |
|
SU1589360A1 |
| Электропривод с подчиненным регулированием параметров | 1987 |
|
SU1450062A1 |
Изобретение относится к позиционным электроприводам постоянного тока, выполняющим перемещение рабочих органов на заданную величину. Цель изобретения - повышение точности регулирования положения при наличии статической нагрузки на валу электродвигателя. Электропривод содержит электродвигатель постоянного тока 1, подключенный к регулируемому преобразователю 2, регулятор положения 5, пропорциональньм регулятор скорости 6, регулятор тока 7 и датчики положения, скорости и тока 8, 9 и 10. Электропривод дополнительно снабжен блоком вычисления начального задания скорости 11, коммутирующим элементом с двумя замыкающими 17, 19 и двумя размыкающими 16, 18 исполнительными цепями и последовательно соединенными интегральным регулятором положения 12, сумматором 13 и пропорциональным регулятором положения 14. Повышение точности регулирования положения обеспечивается образованием двух до- , (Л W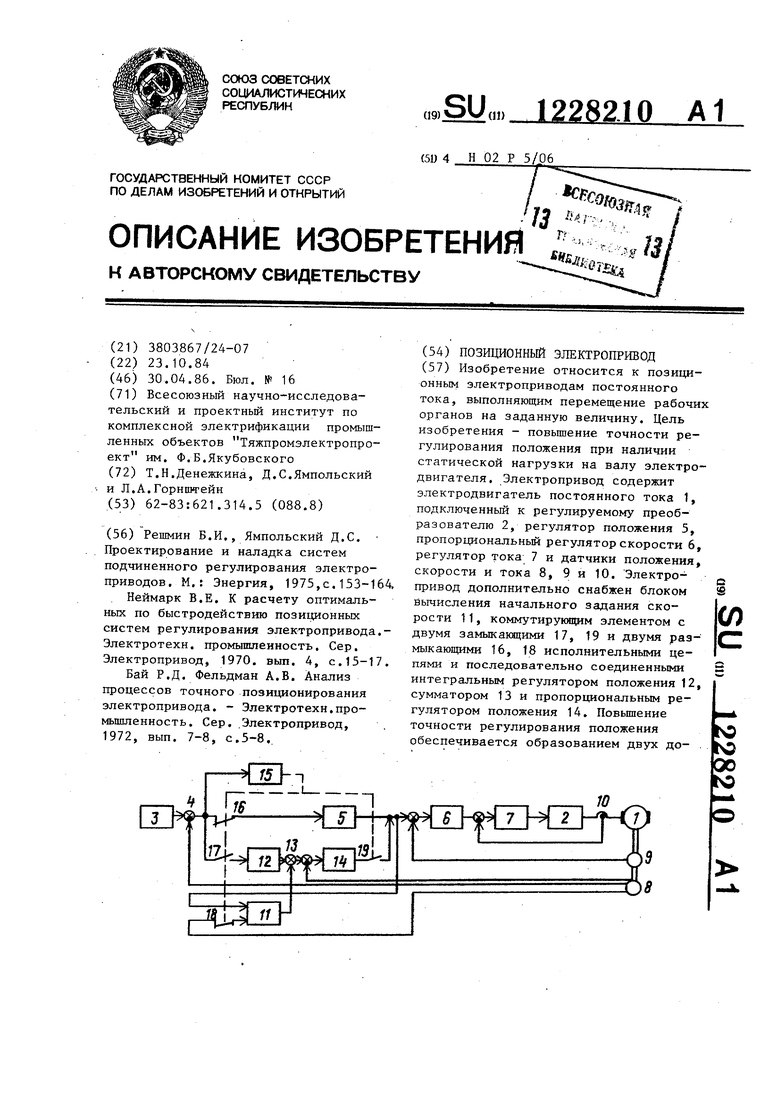
| Решмин Б.И., Ямпольский Д.С | |||
| Проектирование и наладка систем подчиненного регулирования электроприводов | |||
| М | |||
| : Энергия, 1975,с | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
| К расчету оптимальных по быстродействию позиционных систем регулирования электропривода.- Электротехн | |||
| промышленность | |||
| Сер | |||
| Электропривод, 1970 | |||
| вып | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Бай Р.Д | |||
| Фельдман А.В | |||
| Анализ процессов точного позиционирования электропривода | |||
| - Электротехн.про- мьшшенность | |||
| Сер | |||
| Электропривод, 1972, вып | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
