Изобретение относится к электротехнике, в частности к электроприводам с подчиненным регулированием параметров, регуляторы скорости которых не содержат интегрирующих звеньев, может быть использовано для управления механизмами, работающими в условиях частых ускорений и замедлений, например, в электроприводах графопостроителей и является усовершенствованием изобретения по авт.св. № 1450062.
Цель изобретения - повышение быстродействия при разгоне электродвигателя.
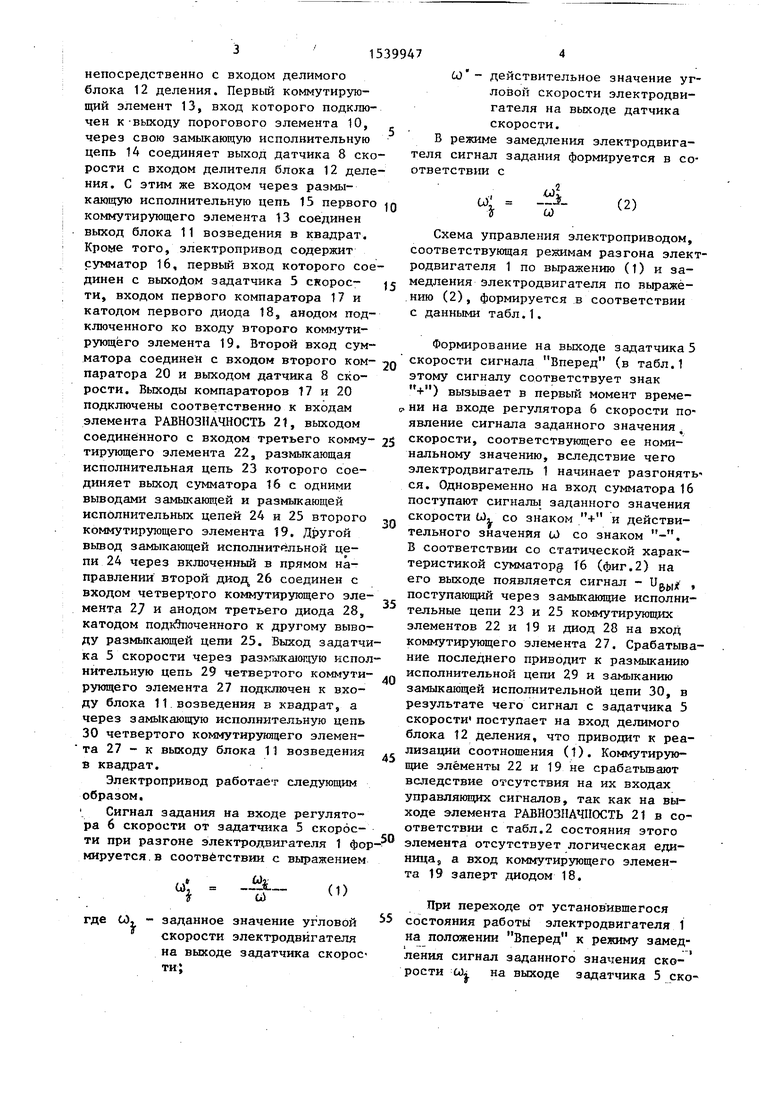
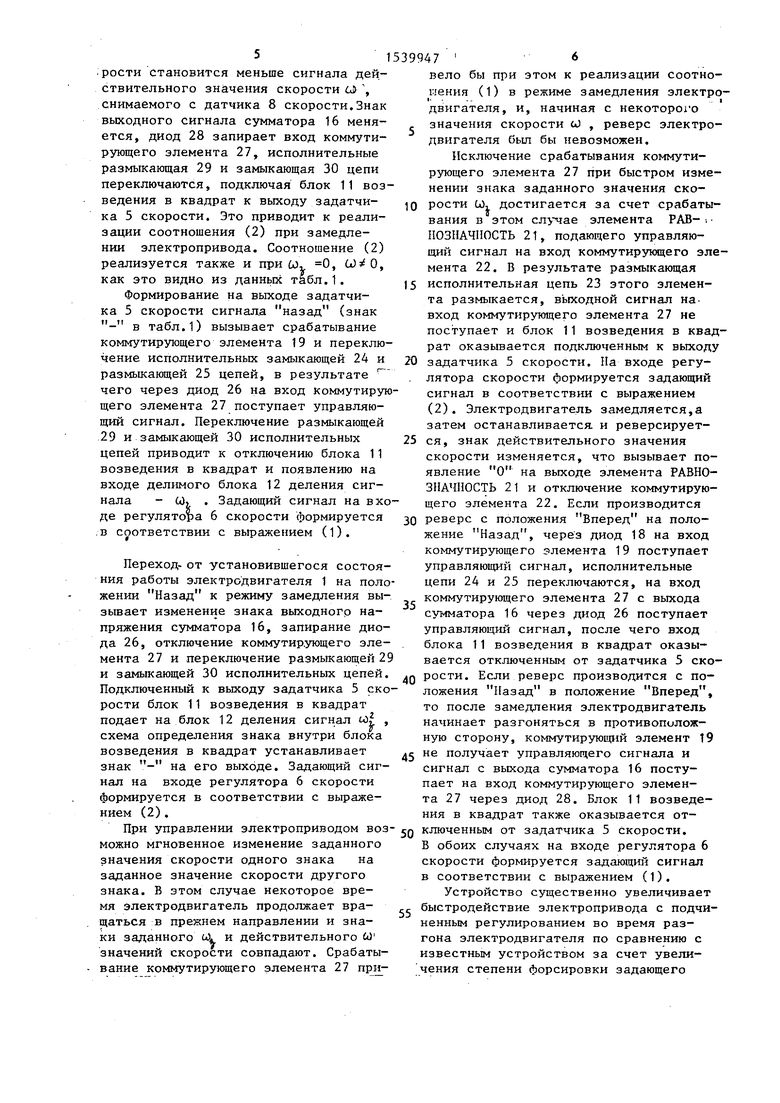
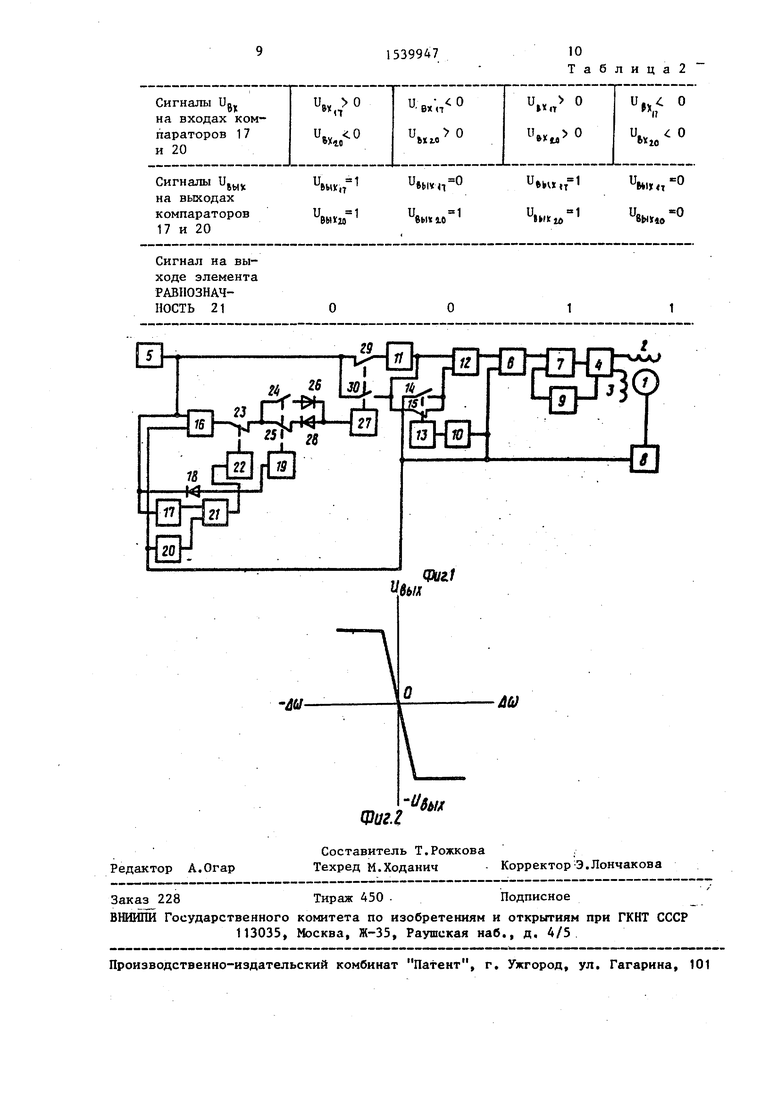
На фиг.1 представлена функциональная схема электропривода; на фиг.2 - статическая характеристика сумматора.
Электропривод содержит электродвигатель 1 с обмотками 2 и 3 управления, соединенными с выходами широтно- импульсного преобразователя 4, в цепь управления которого включены задат- чик 5 скорости и последовательно соединенные регуляторы 6 и 7 соответственно скорости и тока. Датчик 8 скорости, связанный с электродвигателем 1, соединен с регулятором 6 скорости, датчик 9 тока соединен с регулятором 7 тока и с измерительным выходом широтно-импульсного преобразователя 4, С выходом датчика скорости соединен также пороговый элемент 10. Выход бло- ка 11 возведения в квадрат соединен
«it
сл со со со
-sj
РО
непосредственно с входом делимого блока 12 деления. Первый коммутирующий элемент 13, вход которого подключен к-выходу порогового элемента 10, через свою замыкающую исполнительную цепь 14 соединяет выход датчика 8 скорости с входом делителя блока 12 деления. С этим же входом через размыкающую исполнительную цепь 15 первого коммутирующего элемента 13 соединен выход блока 11 возведения в квадрат. Кроме того, электропривод содержит сумматор 16, первый вход которого соединен с выхоДом задатчика 5 скорое- ти, входом первого компаратора 17 и катодом первого диода 18, анодом подключенного ко входу второго коммутирующего элемента 19. Второй вход сумматора соединен с входом второго ком- паратора 20 и выходом датчика 8 скорости. Выходы компараторов 17 и 20 подключены соответственно к входам
О)
скорости сигнала
действительное значение угловой скорости электродвигателя на выходе датчика скорости.
В режиме замедления электродвигателя сигнал задания формируется в соответствии с
2
(2)
ei
w
скорости сигнала
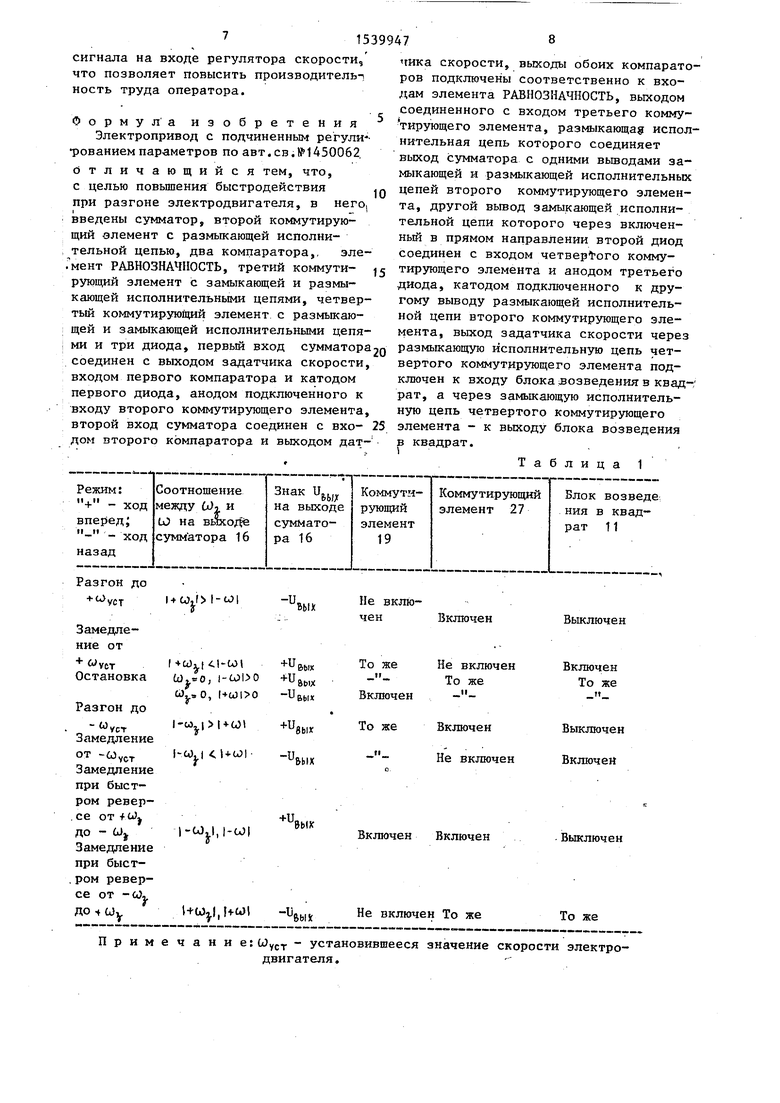
Схема управления электроприводом, соответствующая режимам разгона электродвигателя 1 по выражению (1) и замедления электродвигателя по выражению (2), формируется в соответствии с данными табл.1.
рости сигнала
Формирование на выходе задатчика 5 Вперед (в табл.1
скорости сигнала
этому сигналу соответствует знак +) вызывает в первый момент времени на входе регулятора 6 скорости по
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1987 |
|
SU1450062A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
Изобретение относится к электротехнике, в частности к электроприводам с подчиненным регулированием параметров, регуляторы скорости которых не содержат интегрирующих звеньев, и может быть использовано для управления механизмами, работающими в условиях частых ускорений и замедлений, например в электроприводах графопостроителей. Целью изобретения является повышение быстродействия при разгоне электродвигателя. Электропривод содержит электродвигатель, при разгоне которого сигнал задания формируется делением сигнала с задатчика скорости на сигнал с датчика скорости, а при замедлении электродвигателя - делением квадрата сигнала с задатчика скорости на сигнал с датчика скорости. Выбор требуемой структуры электропривода обеспечивается за счет введения сумматора, двух компараторов и трех коммутирующих элементов. Устройство существенно увеличивает быстродействие электропривода во время разгона за счет увеличения степени форсировки задающего сигнала на входе регулятора скорости, что позволяет повысить производительность труда оператора. 2 ил.
30
35
элемента РАВНОЗНАЧНОСТЬ 21, выходом явление сигнала заданного значения, соединенного с входом третьего комму- 25 скорости, соответствующего ее номи- тирующего элемента 22, размыкающая исполнительная цепь 23 которого соединяет выход сумматора 16 с одними выводами замыкающей и размыкающей исполнительных цепей 24 и 25 второго коммутирующего элемента 19. Другой вывод замыкающей исполнительной цепи 24 через включенный в прямом направлении второй диод 26 соединен с входом четвертого коммутирующего элемента 27 и анодом третьего диода 28, катодом подключенного к другому выводу размыкающей цепи 25. Выход задатчика 5 скорости через разряжающую исполнительную цепь 29 четвертого коммути- .Q рующего элемента 27 подключен к входу блока 11 возведения в квадрат, а через замыкающую исполнительную цепь 30 четвертого коммутирующего элемен- та 27 - к выходу блока 1 возведения в квадрат.
Электропривод работает следующим образом,
1 Сигнал задания на входе регулятора 6 скорости от задатчика 5 скорос45
нальному значению, вследствие чего электродвигатель 1 начинает разгонять ся. Одновременно на вход сумматора 16 поступают сигналы заданного значения скорости Ы, со знаком + и действительного значения и) со знаком -. В соответствии со статической характеристикой сумматору 16 (фиг.2) на его выходе появляется сигнал - Uoj, , поступающий через замыкающие исполнительные цепи 23 и 25 коммутирующих элементов 22 и 19 и диод 28 на вход коммутирующего элемента 27. Срабатыва ние последнего приводит к размыканию исполнительной цепи 29 и замыканию замыкающей исполнительной цепи 30, в результате чего сигнал с задатчика 5 скорости1 поступает на вход делимого блока 12 деления, что приводит к реализации соотношения (1). Коммутирующие элементы 22 и 19 не срабатывают вследствие отсутствия на их входах управляющих сигналов, так как на выходе элемента РАВНОЗНАЧНОСТЬ 21 в соответствии с табл.2 состояния этого
ти при разгоне электродвигателя 1 фор- элемента отсутствует логическая едимируется в соответствии с выражением
СО,
&
Сд
(1)
ч
СОГ - заданное значение угловой скорости электродвигателя на выходе задатчика скорости;
0
5
явление сигнала заданного значения, 5 скорости, соответствующего ее номи- Q
5
нальному значению, вследствие чего электродвигатель 1 начинает разгонять- ся. Одновременно на вход сумматора 16 поступают сигналы заданного значения скорости Ы, со знаком + и действительного значения и) со знаком -. В соответствии со статической характеристикой сумматору 16 (фиг.2) на его выходе появляется сигнал - Uoj, , поступающий через замыкающие исполнительные цепи 23 и 25 коммутирующих элементов 22 и 19 и диод 28 на вход коммутирующего элемента 27. Срабатывание последнего приводит к размыканию исполнительной цепи 29 и замыканию замыкающей исполнительной цепи 30, в результате чего сигнал с задатчика 5 скорости1 поступает на вход делимого блока 12 деления, что приводит к реализации соотношения (1). Коммутирующие элементы 22 и 19 не срабатывают вследствие отсутствия на их входах управляющих сигналов, так как на выходе элемента РАВНОЗНАЧНОСТЬ 21 в соответствии с табл.2 состояния этого
ница5 а вход коммутирующего элемента 19 заперт диодом 18.
При переходе от установившегося состояния работы электродвигателя 1 на положении Вперед к режиму замедления сигнал заданного значения ско- рости со, на выходе задатчика 5 скорости становится меньше сигнала действительного значения скорости 6Л снимаемого с датчика 8 скорости.Знак выходного сигнала сумматора 16 меняется, диод 28 запирает вход коммутирующего элемента 27, исполнительные размыкающая 29 и замыкающая 30 цепи переключаются, подключая блок 11 возведения в квадрат к выходу задатчи- ка 5 скорости. Это приводит к реализации соотношения (2) при замедлении электропривода. Соотношение (2) реализуется также и при 60, 0, , как это видно из данных табл.1.
Формирование на выходе задатчи- ка 5 скорости сигнала назад (знак - в табл.1) вызывает срабатывание коммутирующего элемента 19 и переключение исполнительных замыкающей 24 и размыкающей 25 цепей, в результате чего через диод 26 на вход коммутирующего элемента 27 поступает управляющий сигнал. Переключение размыкающей 29 и замыкающей 30 исполнительных цепей приводит к отключению блока 11 возведения в квадрат и появлению на входе делимого блока 12 деления сигнала - СО, . Задающий сигнал на входе регулятора 6 скорости формируется в соответствии с выражением (1).
Переход- от установившегося состояния работы электродвигателя 1 на положении Назад к режиму замедления вызывает изменение знака выходного напряжения сумматора 16, запирание диода 26, отключение коммутирующего элемента 27 и переключение размыкающей 29
и замыкающей 30 исполнительных цепей. рости. Если реверс производится с по- Подключенный к выходу задатчика 5 ско- ложения Назад в положение Вперед, рости блок 11 возведения в квадрат подает на блок 12 деления сигнал toЈ , схема определения знака внутри блока
то после замедления электродвигатель начинает разгоняться в противоположную сторону, коммутирующий элемент 19 д5 не получает управляющего сигнала и сигнал с выхода сумматора 16 поступает на вход коммутирующего элемента 27 через диод 28. Блок 11 возведения в квадрат также оказывается отвозведения в квадрат устанавливает знак - на его выходе. Задающий сигнал на входе регулятора 6 скорости формируется в соответствии с выражением (2) .
При управлении электроприводом ключенным от задатчика 5 скорости.
можно мгновенное изменение заданного значения скорости одного знака на заданное значение скорости другого знака. В этом случае некоторое время электродвигатель продолжает вращаться в прежнем направлении и знаки заданного Ц. и действительного W значений скорости совпадают. Срабатывание коммутирующего элемента 27 при0
вело бы при этом к реализации соотнопения (1) в режиме замедления электро- 1
двигателя, и, начиная с некоторого значения скорости со , реверс электродвигателя был бы невозможен.
Исключение срабатывания коммутирующего элемента 27 при быстром изменении знака заданного значения скорости СО, достигается за счет срабаты- элемента РАВ-,
вания в этом случае НОЗНАЧИОСТЬ 21, подающего управляющий сигнал на вход коммутирующего элемента 22. В результате размыкающая
5 исполнительная цепь 23 этого элемента размыкается, выходной сигнал на вход коммутирующего элемента 27 не поступает и блок 11 возведения в квадрат оказывается подключенным к выходу
0 задатчика 5 скорости. На входе регулятора скорости формируется задающий сигнал в соответствии с выражением (2). Электродвигатель замедляется,а затем останавливается и реверсирует5 ся, знак действительного значения
скорости изменяется, что вызывает появление О на выходе элемента РАВНОЗНАЧНОСТЬ 21 и отключение коммутирующего элемента 22. Если производится
0 реверс с положения Вперед на положение Назад, через диод 18 на вход коммутирующего элемента 19 поступает управляющий сигнал, исполнительные цепи 24 и 25 переключаются, на вход коммутирующего элемента 27 с выхода сумматора 16 через диод 26 поступает управляющий сигнал, после чего вход блока 11 возведения в квадрат оказывается отключенным от задатчика 5 ско5
рости. Если реверс производится с по- ложения Назад в положение Вперед,
то после замедления электродвигатель начинает разгоняться в противоположную сторону, коммутирующий элемент 19 не получает управляющего сигнала и сигнал с выхода сумматора 16 поступает на вход коммутирующего элемента 27 через диод 28. Блок 11 возведения в квадрат также оказывается отВ обоих случаях на входе регулятора 6 скорости формируется задающий сигнал в соответствии с выражением (1).
Устройство существенно увеличивает быстродействие электропривода с подчиненным регулированием во время разгона электродвигателя по сравнению с известным устройством за счет увеличения степени форсировки задающего
сигнала на входе регулятора скорости, что позволяет повысить производитель- ность труда оператора.
Формула изобретения
Электропривод с подчиненным регулированием параметров по авт.св.№1450062
отличающийся тем, что, с целью повышения быстродействия ,Q при разгоне электродвигателя, в него( введены сумматор, второй коммутирующий элемент с размыкающей исполнительной цепью, два компаратора, эле- Гмент РАВНОЗНАЧНОСТЬ, третий коммути- 15 рующий элемент с замыкающей и размыкающей исполнительными цепями, четвертый коммутирующий элемент с размыкающей и замыкающей исполнительными цепями и три диода, первый вход сумматора2Q соединен с выходом задатчика скорости, входом первого компаратора и катодом первого диода, анодом подключенного к входу второго коммутирующего элемента, второй вход сумматора соединен с вхо- 25 дом второго компаратора и выходом датПримечание:С0уст - установившееся значение скорости электродвигателя.
чика скорости, выходы обоих компараторов подключены соответственно к входам элемента РАВНОЗНАЧНОСТЬ, выходом соединенного с входом третьего коммутирующего элемента, размыкающая исполнительная цепь которого соединяет выход сумматора с одними выводами замыкающей и размыкающей исполнительных цепей второго коммутирующего элемента, другой вывод замыкающей исполнительной цепи которого через включенный в прямом направлении второй диод соединен с входом четвертого коммутирующего элемента и анодом третьего диода, катодом подключенного к другому выводу размыкающей исполнительной цепи второго коммутирующего элемента, выход задатчика скорости через размыкающую исполнительную цепь четвертого коммутирующего элемента подключен к входу блока возведения в квадрат, а через замыкающую исполнительную цепь четвертого коммутирующего элемента - к выходу блока возведения в квадрат.
Таблица 1
W1
W1
Сигнал на выходе элемента РАВНОЗНАЧНОСТЬ 21
F lKrSSl
I1 Г
,
W1
ОД/г/
| Электропривод с подчиненным регулированием параметров | 1987 |
|
SU1450062A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
