4ik. Сл
CD 4::ь N5
Изобретение относится к устройствам для автоматического управления и может быть использовано в системах регулирования угла поворота вращающихся объектов.
Цель изобретения - повьшение точности и устойчивости слежения при отсутствии ограничений на заданный и текущий углы поворота.
На чертеже представлена блок-схема устройства.
На чертеже показаны объект . уп-п равления, первый 2 и второй 3 пороговые элементы, первый 4, второй 5 и третий 6 блоки вычисления разности, первый 7 и второй 8 входы устройства и выход 9 устройства
Устройство работает следующим образом.
При смене величины сигнала узлового положения на вкЬде 7 (который поступает с датчика), на выходе блока 6 вычисления разности появляется рассогласование, которое воздействует на объект 1 управления.
В результате отработки входного воздействия на входах блока 5 вычисления разности устанавливаются одинаковые сигналы. Пороговые элементы 2 и 3 выполняют следующую функцию Г 1Г, если и%0;
у г8ign и если и 0,
где и - вход порогового элемента;
у - выход.
Поэтому сигнал на выходе блока 6 вычисления разности
Д х - X - sign (х - х)- |Г,
где X
X - sign .
Формула для рассогласования может быть записана в следующем виде: X , если - 55 x -x rj
х -х+2Т, если X - X-U - , , если х - .
Из этой записи следует, что если линейная разность меньше Т , то U совпадает с , если х -х меньше -Т, то к линейной разности добавляется 2Г, а если больше fT - отнимается 2f.
Такой способ получения рассогласования улучшает качество процесса регулирования. Рассогласованием между двумя угловыми положениями на окружности является число по модулю.
5
0
5
0
5
0
равное кратчайшей дуге между двумя положениями, с положительным знаком, если кратчайший переход от текзпцегр к заданному происходит против часовой стрелки (положительное направление) и с отрицательным знаком, если кратчайший переход происходит по часовой стрелке.
Пусть к 0. Пока X О и даже когда , нох линейная разность X - X отвечает своему назначению: знак рассогласования положителен и величина равна длине меньшей дуги. Рассогласование Л дает тот же результат . Но если взять - , то линейная разность по величине становится Т и направлена вдоль более длинной дуги. Это приводит к движению объекта не в ту сторону. В этом случае Д х -х-2 и, имеет знак - и равно длине дополнительной более короткой дуги.
Пусть .0. При пересечении, например параметрах точки при движении по часовой стрелке заданного и следящего процессов линейная разность увеличится скачком на 21, становится положительной и заставляет изменить направление движения исполнительной оси X, причем с наибольшим управляющим воздействием, равным 2. При этом рассогласовании Л процесс будет плавным, поскольку в этом случае Л -X - 2 п.
Следовательно, данное устройство позволяет организовать процесс слежения с большей точностью и лучшим
качеством.
Формула изобр1етения
0
5
Устройство формирования управля- нлцего сигнала для поворота вращающихся объектов, содержащее первый порое говый элемент, первый блок вычисления разности, первый вход которого подключен к входу устройства, последовательно соединенные второй блок вычисления разности, второй пороговый элемент и третий блок вычисления разности, отличающееся тем, что, с целью повьш1ения точности и устойчивости слежения при отсутствии ограничений на заданный и текущий углы поворота, вход устройства соединен с входом первого порогового элемента, выход которого подключен к второму входу первого блока вычисления разности, выход первого блока
1451642
вычисления разности подсоединен к вход второго порогового элемента сое- первому входу второго блока вычисле динен с вторым входом третьего блока ния разности, второй вход которого вычисления разности, выход которого связаи с вторым входом устройстве-, является выходом устройства.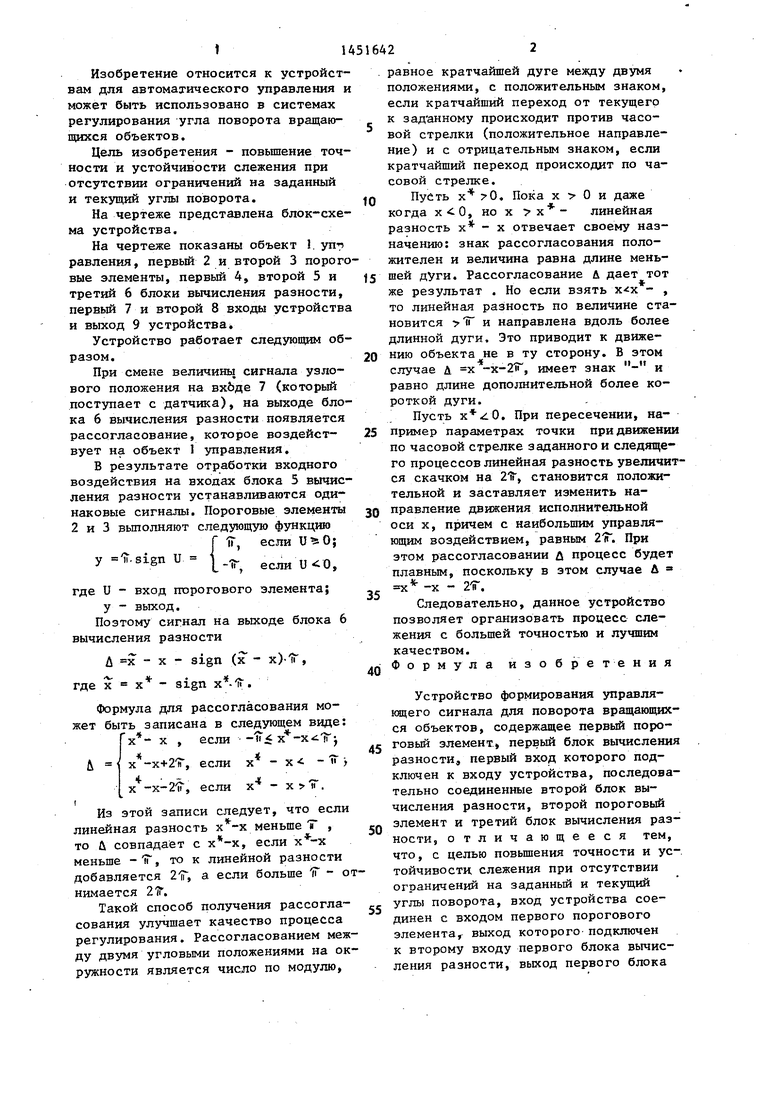
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ итерационного измерения рассогласования в двумерных следящих системах и устройство для его осуществления | 2019 |
|
RU2733262C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282874C2 |
| Устройство для автоматического сопровождения объекта слежения | 2018 |
|
RU2694888C1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| СПОСОБ ДВУХКАНАЛЬНОГО УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ОБЪЕКТОВ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629922C1 |
| Цифровая следящая система | 1989 |
|
SU1797094A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ПРИВОДА | 2004 |
|
RU2271030C2 |
| Способ управления объектом | 1981 |
|
SU964573A2 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах регулирования угла поворота вращающихся объектов. Цель изобретения - повьппение точности и устойчивости слежения при отсутствии ограничений на заданный и текущий углы поворота. Поставленная цель достигается применением логического закона управления, позволяющего выбирать направление движения по кратчайшей дуге между двумя положениями. Устройство содержит два пороговых элемента 2, 3, три блока вычисления разности 4, 5, 6. 1 ил. S (Л
| Ривкин С.С | |||
| Стабилизация измерительных устройств на качающемся основании | |||
| - М.: Наука, 1978, с.291, рис.10.1 | |||
| Нелинейные корректирующие устройства в системах автоматического управления / Под редакцией Ю.И.Топче- ева | |||
| - М.: Машиностроение, 1971, ,с.29, табл.1.7, п.2, |
