(S) СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU435500A1 |
| Корректирующее устройство | 1985 |
|
SU1278805A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| Способ автоматического управления в системе с люфтом | 1975 |
|
SU728111A1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| Регулятор с ограничением управляющего воздействия | 1986 |
|
SU1383287A1 |
| Корректирующее устройство | 1983 |
|
SU1145320A1 |
| Способ релейного управления объектом с астатизмом второго порядка | 1971 |
|
SU894671A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |

.1 Изобретение относится к автоматическому управлению и регулированию и может найти применение при разработке систем управления.
По основному авт. св. № 703733 известен способ, согласно которому за- s поминают сигнал рассогласования в момент равенства нулю линейной комбинации сигнала рассогласования и : скорости изменения рассогласования используют постоянный управляющий сиг- ю нал, знак которого совпадает со знаком разности между сигналом.рассогласования и заданной частью запомненного сигнала рассогласования, соответствующего рассоглассованию в началь- is ный момент 1 . .
Недостаток данного способа заключается в лоиижен нрм быстродействии системы при наличии ограничения ;мд.кт..,. ,
„ h
симально допустимой скорости движе- ния объекта, так как преждевременное прерывание режима поддержания заданной максимальной скорости обуслоВ .
ленное инвертированием управляющего сигнала, приводит к многократному повторению операций по разгону до заданной скорости, поддержанию заданной скорости и торможению и, как. следствие, к увеличению времени отработки системой начального рассогласования.
Целью изобретения является повышение быстродействия системы управления.
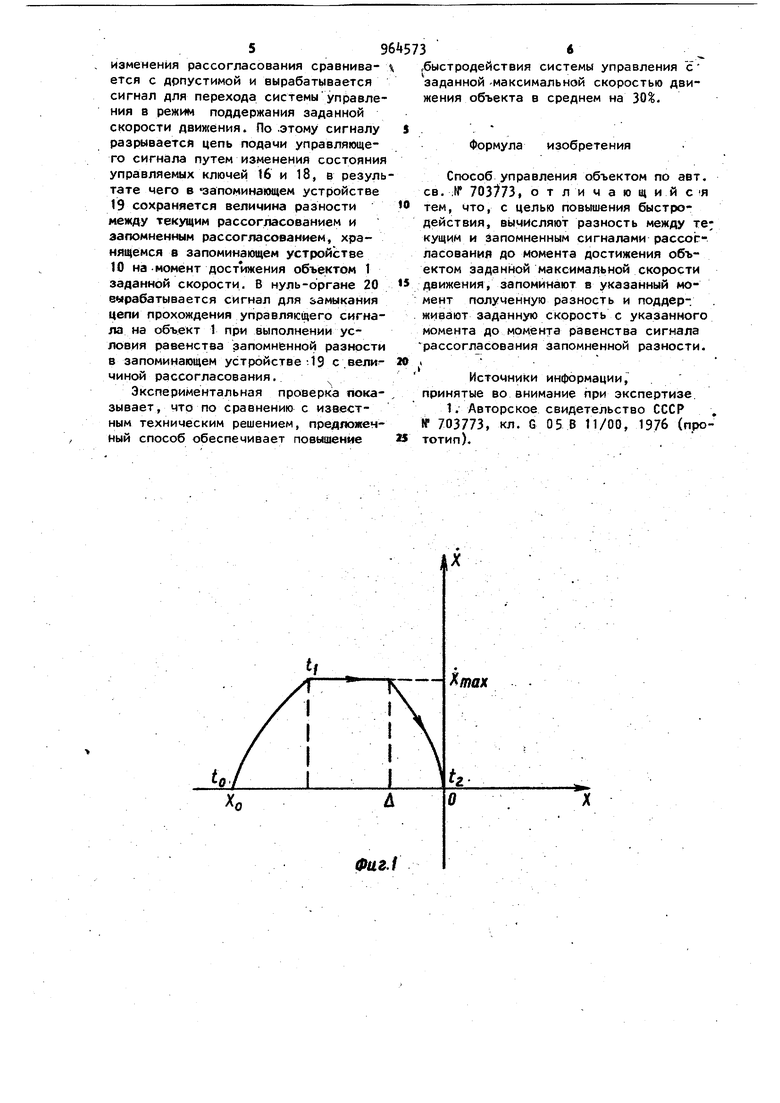
Поставленная цель достигается . тем, что согласно способу управления объектом вычисляют разность меж ду текущим и запомненным сигналами рассогласования до момента достижения объектом заданной максимальной скорости движения, запоминают в укаэанный момент полученную разность и поддерживают заданную скорость с указанного момента до момента равенства сигнала рассогласования заИомненной разности. . Использование новых операций позволяет определить длительность:интервала, в котором должен непрерывно сохраняться режим выдерживания заданной скорости. Начало интервала определяется моментом достижения заданной скорости, а конец интервала - траекторией.изображающей точки на фазовом портрете движения объекта, приводящей ее в начало координат. В силу того, что для дос таточно большого класса: объектов имеет место практическая симметрия траекторий при разных знаках управляющего сигнала, начало и конец режима поддержания заданной скорости определяется приращением рассогласования пройденного объектом до момента достижения заданной скорости. В качестве примера рассмотрим объект управления, описываемый урав нением х U , где X - вторая производная по времени от рассогласования; U - управляющее воздействие, принимающее значения ± . ЕСпи в некоторый момент времени t tQ, который примем за начальный, имеем начальные рассогласование XQ и скорость XQ,. то в общем случае линейная комбинация сигнала рассогласования и скорости его изменения не равна нулю. В этом случае запоминают сигнал рассогласования Хэ XQ, соответствующий начальному, и прикладыва ют к объекту управляющее воздействие равное U -UpSign (х-оСх., где sign(f) - операция выделения знака выражения в скоб ках; сигнал рассогласования в момент времени t ; параметр настройки; запомненный сигнал рас согласования. Под действием управляющего сигнала объект приходит в движение, при этом вычисляют разность между текущим и запомненным сигналами рассогла сования л X - Хддо момента .,, когда скорость движения объекта достигнет заданной максимальной величины .В этот момент времени запоминают полученную разность и переводят управляющее устройство в режим поддержания заданной скорости движения объекта, например обнулив управляющий сигнал. В процессе поддержания заданной скорости сравнивают текущий сигнал рассогласования с запомнен- ной разностью и в момент их равенства X д выключают режим поддержания заданной скорости и снова прикладывают управляющее воздействие U « UoSrign (х -otxjX В процессе управления может выполниться условие равенства нулю указанной линейной комбинации. В этом случае производят коррекцию запомненного сигнала рассогласования путем запоминания текущего рассогласования , соответствующего моменту обращения в нуль указанной линейной комбинации. При соответствующем выборе параметра настройки oL система управления переводит объект из начального положения Хр,Хд в положение , за минимальное время.На фиг. 1 приведен типовой фазовый портрет движения (tg- начальный момент времени; время включения режима поддержания заданной скорое ти; время достижения начала координат); на-фиг. 2 - пример выполнения предлагаемого способа в системе управления объектом. Сигнал о величине перемещения объекта 1 вырабатывается в датчике 2 и поступае-т в сумматор 3, на второй вход которого подают сигнал, срответствующий требуемому положению объекта 1. Полученный сигнал рассогласования поступает в усилитель , сумматоры 5-7 дифференцирующий фильтр 8 и через управляемый ключ 9 8 запоминающее устройство 10. Сигнал из дифференцирующего фильтра 8 усиливается в усилителе 11 и складывается в сумматоре 12 с выходным сигналом усилителя k, Суммарный сигнал попадает в нуль-орган t3, выходной сигнал которого управляет состоянием управляемого ключа 9. Сигнал из запоминающего устройства 10 поступает в усилитель И и сумматор 6. Сигнал из усилителя 14 в сумматоре 5 суммируется с сигналом рассогласования и поступает в сигнумреле 15, где вырабатывается управля- . ющий сигнал. Этот сигнал через управляемый ключ 16 подают в объект 1. Сигнал из дифференцирующего фильтра 8 поступает в пороговое устройство 17, где текущая величина скорости
изменения рассогласования сравнивается с допустимой и вырабатывается сигнал для перехода системыуправления в режим поддержания заданной скорости движения. По .этому сигналу разрывается цепь подачи управляющего сигнала путем изменения состояния управляемых ключей 16 и 18, в результате чего в запоминающем устройстве 19 сохраняется величина разности между текущим рассогласованием и запомненным рассогласованием, хранящемся в запоминающем устройстве 10 на-момент достижения объектом 1 заданной скорости. В нуль-органе 20 вырабатывается сигнал для замыкания цепи прохождения управляющего сигнала на объект 1 при выполнении условия равенства запомненной разности в запоминающем устройстве-19 с .вели чиной рассогласования,
Экспериментальная проверка показывает, что по сравнению с известным техническим решением, предпожечный способ обеспечивает повышение
.быстродействия системы управления с заданной -максимальной скоростью движения объекта в среднем на 30%.
Формула изобретения
Способ управления объектом по авт, св. .Vf , о т ли ч а ю щ и и с Я тем, что, с целью повышения быстродействия, вычисляют разность между текущим и запомненным сигналами рассогласования до момента достижения объектом заданной максимальной скорости движения, запоминают в указанный момент полученную разность и поддер-. живают заданную скорость с указанного момента до момента равенства сигнала рассогласования запомненной разности.
t, .
Источники информации, принятые во внимание при экспертизе.
Фиг.
. .;;- -inHtiitf:
ч
