Известны шпалоиодбивочные машины для железнодорожного иути, выполненные в виде самоходной рельсовой тележки, снабженной подбивочными блоками, гидравлическим приводом и устройством автоматического управления передвижением от шпалы к шкале с предварительной настройкой на заданный цикл работы.
Предлагаемая машина отличается от известных тем, что в ней применен установленный под рамой и проходящий над рельсовой подкладкой полупроводниковый электронный датчик с приемной магнитной антенной. Датчик имеет генератор частотных колебаний и реле управления передвижением машины и заглублением подбивочных блоков.
Такое выполнение позволяет обеспечить точную автоматическую остановку над подбиваемой шпалой и автоматическое опускание подбивочных блоков.
Кроме того, с целью автоматического подъема подбивочных блоков, применено электрогидравлическое реле давления. Для дистанционного управления передвижением на машине может быть установлено радиореле управления гидравлическими золотниками передвижения, управляемое расположенным вне машины передатчиком с кварцевой стабилизацией частоты.
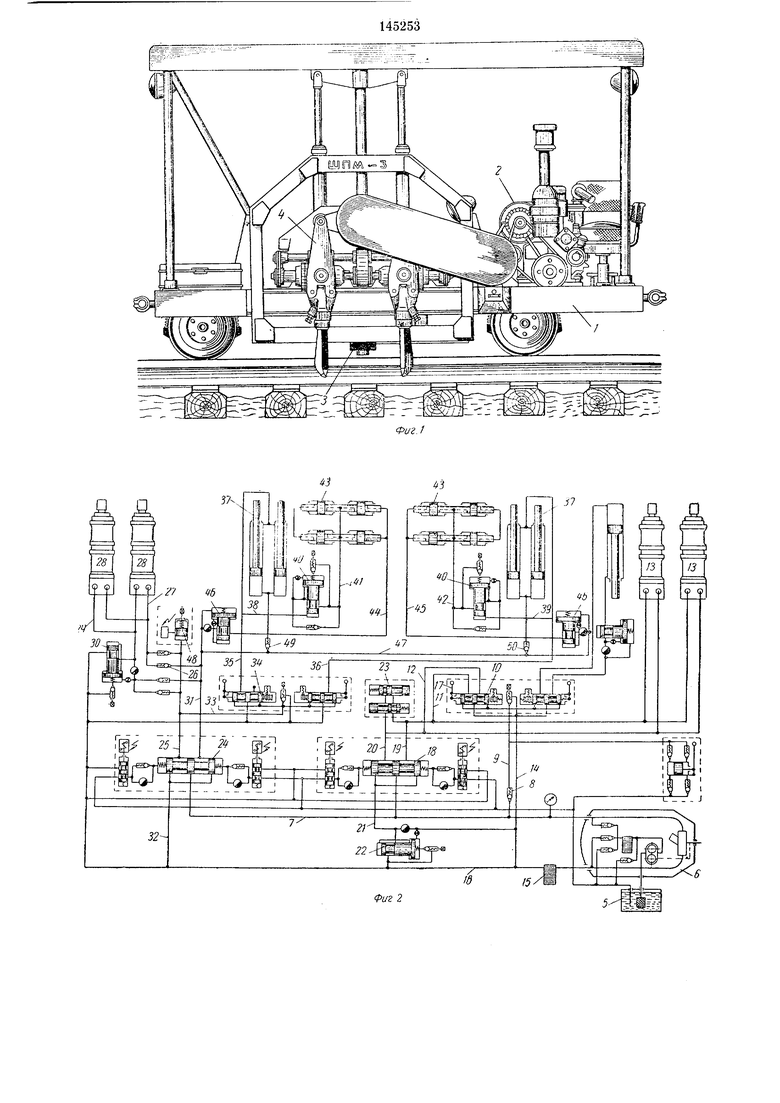
На фиг. 1 показана шпалоподбивочная машина, обший вид; на фиг. 2 - принципиальная схема гидросистемы машины.
Шпалоподбивочная машина смонтирована на самоходной тележке / с приводом от гидромоторов. В качестве первичного двигателя используется серийный дизельный мотор 2. Электронный датчик 3 питается от аккумуляторной батареи. Подбивочные блоки 4 приводятся в действие от гидромоторов.
Гидросистема машины обеспечивает выполнение всех операций вручную или автоматически при помош,и установленной на машине электрической аппаратуры.
При транспортном передвижении машины рабочая лсидкость из бака 5 посредством насоса 6 нагнетается в магистраль 7, из которой через обратный клапан 8, магистраль 9, гид« рораспределитель W и магистраль 11 или 12 поступает к гидромоторам 13 передвижения. Слив жидкости происходит через магистраль // или 12, гидрораспределитель 10, магистраль 14, фильтр 15 и магистраль 16 к насосу 6. Реверс передвижения машины осуш,ествляется поворотом рукоятки 17 гидрораспределителя 10, а скорость передвижения зависит от производительности насоса 6.
Подача жидкости в гидромоторы 13 может быть также осуш,ествлена через реверсивный золотник 18 с гидроэлектрическим унравлением по магистрали 19 или 20, а слив после гидрораспределителя 10 производится по магистрали 21 через дроссель 22 и магистраль 16 к насосу 6. Для предотвращепия перегрузки магистрали 11 и 12 соедипены предохранительным клапаном 23.
При выборочной подбивке шпал нажатием кнопки на пульте управления оператор подает команду на реверсивный золотник 18, останавливая машину над подбиваемой шпалой. Этой же кнопкой подается команда на реверсивный золотник 24, который открывает магистраль 25 для прохода жидкости от насоса 6 через обратный клапан 26 и магистраль 27 к гидромоторам 28 вибраторов. Слив жидкости производится по магистрали 29, через дроссель 30, магистраль 31, реверсивный золотник 24, магистрали 32 и 16 к насосу 6. По магистралям 25 и 33 жидкость поступает к гидрораспределителю 34 и дальше по магистралям 55. н 36 - в верхние полости цилиндров 37 заглубления подбивочных блоков.
После заглубления блоков на заданную глубину поршни цилиндров 37 дойдут до упора, и давление в магистралях 38 и 39 повысится. При этом откроются предохранительные клапаны 40, через которые жидкость цо магистралям 41 и 42 ноступает в полости цилиндров 43 сжатия лонаток. Слив жидкости осуш,ествляется по магистралям 44 и 45, через дроссели 46, магистрали 47 и 31 к реверсивному золотнику 24 и дальше к насосу 6.
Сжатие лопаток подбивочных блоков производится до тех пор, пока давление в магистрали 25 не поднимется до оиределенной величины, носле чего срабатывает реле 48 давления и подает импульс на гидрораспределитель 34, который соединяет напорную магистраль 7 с магистралью 31. Жидкость по магистрали 31 продолжает поступать к гидромоторам 28, врашая их в прежнем направлении, а через обратные клапаны 49 и 50 жидкость поступает к цилиндрам 37 и 43. Происходит расжатие лопаток и подъем подбивочных блоков.
Как только подбивочные блоки поднимутся в крайнее верхнее положение, сработают концевые выключатели и ставят реверсивный золотник 24 в нейтральное положение. Одновременно включается реверсивный золотник 18, который, в свою очередь, включает гидромоторы 13 нередвижения.
Для повторения цикла подбивки оператор нажатием кнопки «стоп на пульте управлеПИЯ останавливает машину над очередной подбиваемой шпалой.
При автоматическом управлении подача электрических импульсов на реверсивные золотники 18 и 24 осуш.ествляется от электронного датчика, который подает команды на остановку машины и включение подбивочиых блоков.
Предмет изобретения
1. Шпалоподбивочная машина для железнодорожного пути, состояш,ая из самоходной рельсовой тележки, гидравлического привода, подбивочных блоков и устройства автоматического управления ее передвижением от шпалы
к шпале с предварительной настройкой на заданный цикл работы, отличающаяся тем, что, с целью ее точной автоматической остановки над подбиваемой шпалой и автоматического опускания подбивочных блоков, применен установленный под рамой и проходящий над рельсовой подкладкой полупроводниковый электронный датчик с приемной магнитной антенной, состоящий из генератора частотных колебаний и реле управления нередвижением
машины и заглублением подбивочных блоков.
2. Машина но ц. 1, отличающаяся тем, что,
с целью автоматического подъема подбнвочных блоков, нрименено электрогидравлическое
реле давления.
3. Машина по пп. 1 и 2, отличающаяся тем, что, с целью дистапционного управления ее передвижением, применены расположенный вне машины передатчик с кварцевой стабилизацией частоты и установленное на машине
радиореле управления гидравлическими золотниками передвижения.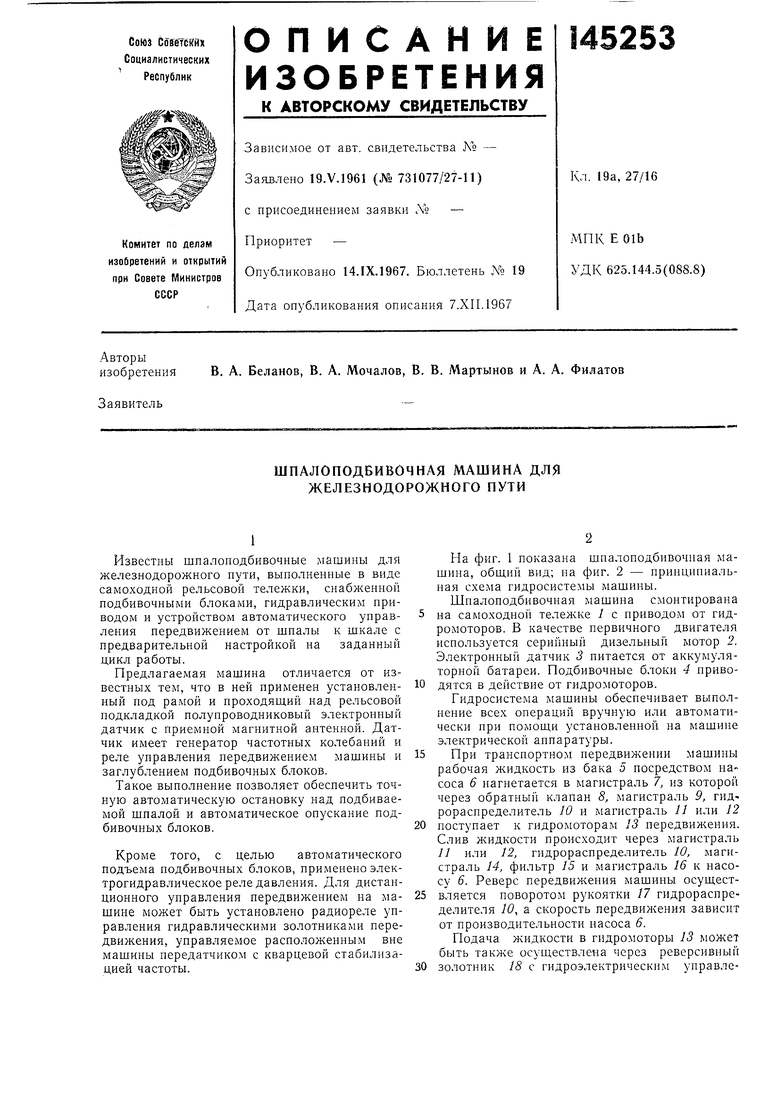
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ШПАЛОПОДБИВОЧНОЙ МАШИНОЙ | 1973 |
|
SU404919A1 |
| Система управления шпалоподбивочным блоком | 1979 |
|
SU897914A1 |
| ВСЕСОЮЗНАЯ ПДТ:П:!^О-:^]{;:;;':Г-НАГ | 1973 |
|
SU375334A1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА | 2000 |
|
RU2194108C2 |
| Способ выправки железнодорожного пути и машина для его реализации | 1974 |
|
SU865137A3 |
| СПОСОБ ВЫПРАВКИ ПУТИ | 2007 |
|
RU2385978C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ШПАЛОПОДБИВОЧНЫХ МАШИН | 2018 |
|
RU2704764C1 |
| СПОСОБ ПОДБИВКИ И СТАБИЛИЗАЦИИ РЕЛЬСОВОГО ПУТИ, ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2378444C2 |
| Передвижная выправочно-подбивочная машина | 1983 |
|
SU1259963A3 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ ШПАЛОПОДБИВОЧНОГО УСТРОЙСТВА | 1991 |
|
RU2020196C1 |