1
Изобретение относится к области установки радиоэлементов на печатные платы, в частности к -устройствам для установки микросхем на печатные платы.
Цель изобретения - повьшение производительности и надежности.
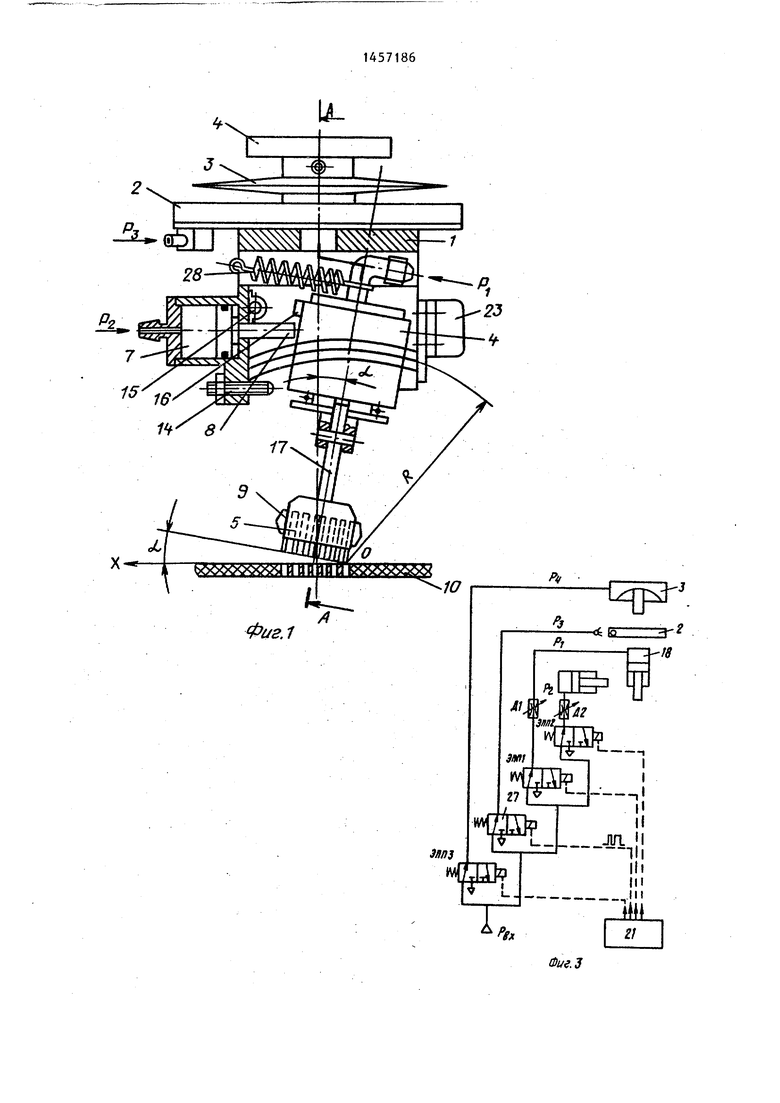
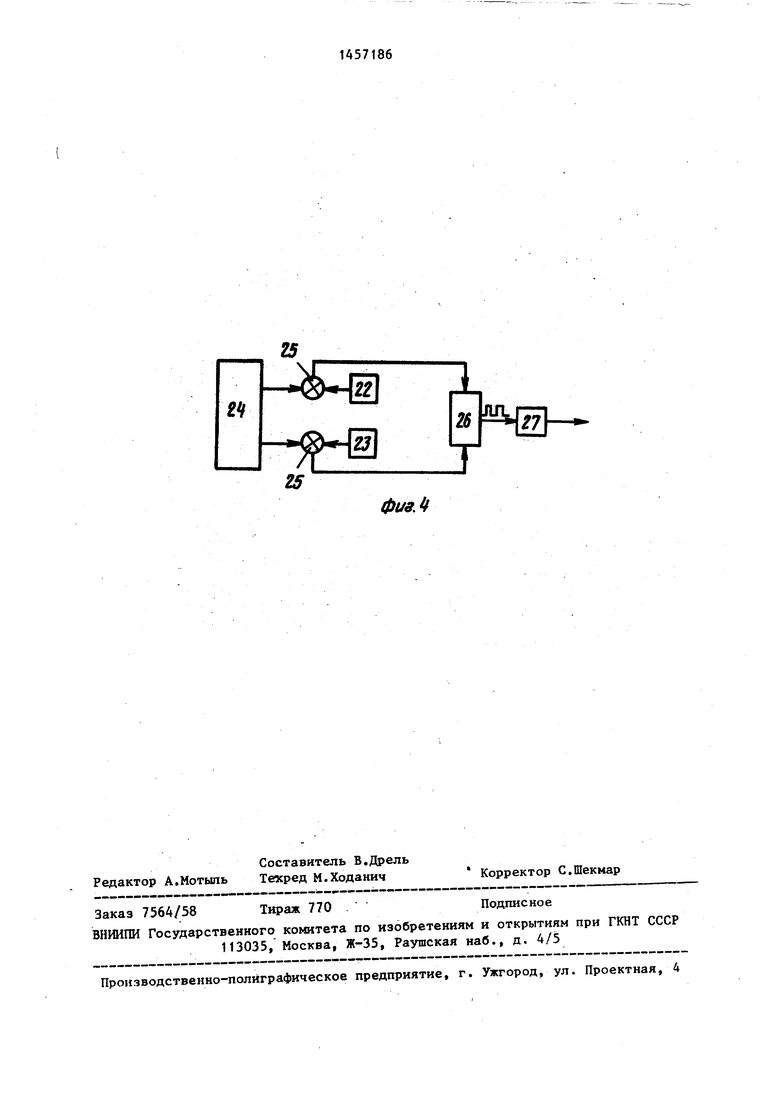
На фиг. 1 показано устройство, обий вид; на фиг. 2 - разрез А-А на иг.1; на фиг. 3 - пневматическая схема устройства; на фиг. 4 - блок управления вибратором.
Устройство содержит ползун 1, на отором установлен пневматический ебалансный шариковый вибратор 2, со- единеньый мембранной коробкой 3 с присоединительным фланцем 4. На ползуне 1 установлен с возможностью враения схват 4 с двумя параллельными зажимшлчи губками 5, на которых выполнены выступы 6 в виде гребенки. Устройство включает средство для измерения угла наклона радиоэлемента относительно продольной оси ползуна 1, выполненное в виде пневмоцилиндра 7 со штоком 8, расположенного перпендикулярно продольной оси ползуна 1. Шток 8 пневмоциливдра 7 установлен с возможностью взаимодействия со схватом 4. Дпя обеспечения поворота микросхемы 9 при установке ее на печатную плату 10 вокруг концов ее крайних выводов геометрическая ось вращения схвата 4 расположена под его зажимными губками 5 со стороны торцов
зажимных губок, расположенных с противоположной от пневмоцилиндра 7 стороны, поэтому корпус 11 схвата 4 установлен в криволинейных шариковых
направляющих 12 между боковыми крьш1- ками 13 ползуна 1.
В исходном положении схват расположен вертикально относительно печатной платы 10, это положение схвата
ограничено упором 14, установленным на ползуне 1. Для контроля исходного положения схвата 4 относительно ползуна 1 на последнем установлен геркон 15, а на корпусе 11 схвата 4 магнит
16. Зажимные губки .5.схвата 4 расположены на концах рычагов 17, для привода зажимных губок предназначен пневмоцилиндр 18, на конце штока 19 этого пневмоцилиндра расположен приводной конус 20. Пневмоцилиндры 7, 18 и мембранная коробка 3 соединены с источником давления Рц , соответственно через электропневмопреобразо- ватели ЭПП 1, ЗИП 2 и ЭПП 3 (фиг.З), управляющие обмотки которых подключены к системе 21 управления. Для регулирования скорости срабатывания пневмоцилиндров 7 и 18 в питающей магистрали этих пневмоцилиндров введены регулируемые дроссели Д1 и Д2. Кроме того, устройство снабжено датчиками 22 и 23 ускорения, установленными взаимно перпендикулярно на боковых стенках ползуна 1 и блоком
управления вибратором 3, входящим в
состав системы 20 управления, включающим задатчик 24 управляющих сигналов, элементы 25 сравнения, элемент ИЛИ 26 и регулятор 27, вьтолненный в врще аналогового электропневмоклапана преобразователя, величина его выходного пневматического сигнала РЗ пропорциональна величине (скважности) входного электрического управляющего сиг- IQ тор 2, вызывает вращение шарика, сознала. Первые входы элементов 25 срав- дающего усилие сканировагшя FCK ,нап- нения соединены с соответствующими выходами задатчика 24 опорных сигнаравление действия которого постоянно изменяется в плоскости, параллельной печатной плате:
лов, а выходы через элемент ШШ 26 подключены к входу регулятора 27, вы ход которого связан с вибратором 3, при этом вторые входы элементов 25 сравнения являются соответствующими входами блока управления вибратором, каждый из которых соединен с выходом соответствзтощего датчика 22, 23 уско рения. Схват 4 подпружинен пружиной 28 относительно ползуна 1 в направлении к пневмоцшшндру 7 и упору 14. Устройство крепится присоединительным фланцем 4 на манипуляторе робота Устройство работает следующим образом.
С помощью робота устройство переносится в зону упорядоченного расположения микросхем РЭ, захват которого осуществляется сведением рычагов 17 с зажимными губками 3 при подаче воздуха давлением Р1 в пневмоцилиндр 18, 35 личину К1, изменяя жесткость всей шток которого перемещает конус 20. колебательной системы из-за контак- В момент захвата ось схвата 4 и рычагов с губками 5 совпадает с продольной осью ползуна 1, т.е. угол о/ О
тов выводов со стенками отверстий, что приводит к уменьшению амплитуды колебания по осям X и Y, а следоваи Рц 0. После захвата микросхема 40 тельно, к изменению величин ускоре-
9 переносится в зону расположения от- ний по этим же осям, что фиксируется
вёрстия в печатной плате 10 под его
выводы, по команде от системы 20 упдатчиками 22 и 23 ускорения.
Вырабатываемые датчиками сигналы поступают в элементы 25 с авнения,
равления ЭШ1 2 подает воздух давлечто соответствует первой стадии сборки.
После опускания устройства до контакта микросхемы с платой начинается вторая стадия сборки5 на которой по команде от системы управления включается регулятор 27 и выключается ЭПП 2. Воздух, поступающий в вибратор 2, вызывает вращение шарика, создающего усилие сканировагшя FCK ,нап-
равление действия которого постоянно изменяется в плоскости, параллельной печатной плате:
FCK mra , .
m - масса;
г - радиус вращения;
tA - угловая скорость вращения шарика.
Сканирующее усилие, приложенное к микросхеме, вызывает пространственное перемещение всех ее выводов с определенным шагом в плоскости платы по
траектория, например в виде спирали Архимеда, причем размеры спирали (площади сканирования) зависят от: амплитуды колебания устройства, которая должна обеспечить попадание отверстия
под вывод в эту площадь сканирования, в границах которой происходит перемещение вывода. Как только вьтоды подпадают в площадь отверстий, под действием они попадают в них на ве-
датчиками 22 и 23 ускорения.
Вырабатываемые датчиками сигналы поступают в элементы 25 с авнения,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки на печатные платы радиоэлементов, преимущественно микросхем | 1988 |
|
SU1688471A1 |
| Устройство для установки радиоэлементов,преимущественно микросхем,на печатную плату | 1985 |
|
SU1282369A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ РАДИОЭЛЕМЕНТОВ, ПРЕИМУЩЕСТВЕННО МИКРОСХЕМ, НА ПЕЧАТНУЮ ПЛАТУ | 1991 |
|
RU2026613C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Устройство для установки и развальцовки контактных штырей на печатных платах | 1989 |
|
SU1709574A1 |
| Устройство для установки на печатную плату радиоэлементов,преимущественно микросхем | 1986 |
|
SU1418895A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно микросхем | 1989 |
|
SU1725431A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Устройство для установки радиоэлементов, преимущественно микросхем, на печатную плату | 1988 |
|
SU1662031A1 |
| Устройство для установки радиоэлементов на печатные платы | 1988 |
|
SU1631766A1 |
Изобретение может быть использовано для установки многовыводных радиоэлементов, преимущественно микросхем, на печатную плату. Устройство содержит ползун (П) 1, на котором установлен вибратор 2, соединенный мембранной коробкой 3 с присое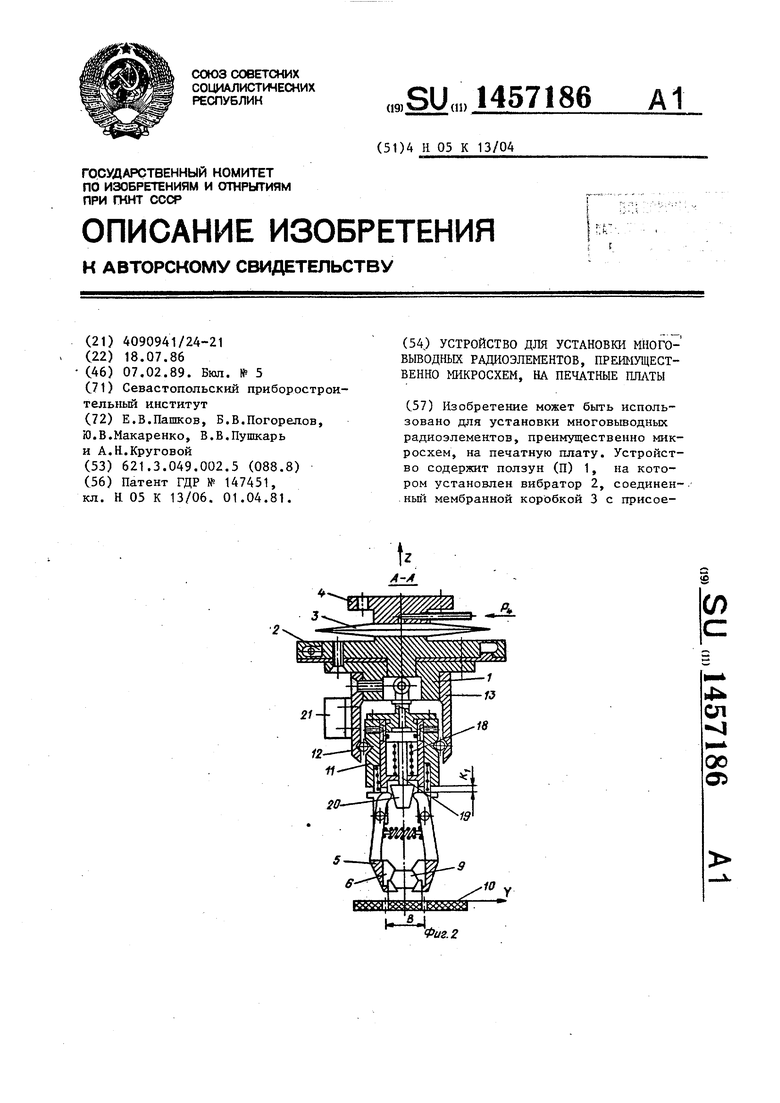
нием Р2 в пневмоцилиндр 7, в резуль- 45 Д сравниваются с управляющими сиг- тате чего схват 4 смещается по шариковым направляющим 23 на угол о. Последующим опусканием робота пара крайних выводов вводится в контакт с
налами, поступающими от задатчика управляющих сигналов. Величина последних зависит от величины максимально возможного относительного смещения печатной платой 10, в результате чего go осей вьшодов и отверстий в плате, что пневмоцилиндр 18 смещается в осевом связано с точностью формовки выводов
и изготовления платы. Сигналы рассогласования поступают в элемент ИЛИ 26,. которьй в случае отклонения в меньнаправлении относительно корпуса 11 схвата 4, выбирая зазор К1 и создавая постоянное усилие контакта между
выводами и платой. Если пара крайних gg шую сторону любого из них вырабаты- выводов попала в соответствующие от- вает управляющий сигнал,поступающий
на управляющую обмотку регулятора 26, увеличивает мощность пневматического
вёрстия, то смещения цилиндра 18 не происходит, а просто эта пара выводов заходит в отверстия на величину К1,
сигнала (расход воздуха), поступающесигнала (расход воздуха), поступающего на вибратор 3 и способствующего увеличению &; и тем самым F,
ох
Схват 4, находящийся под действием момента М, создаваемого пружиной 28, по мере западания выводов в отверстия перемещается по направляющим 12 до положения, когда о 0. Скорость поворота Суглового смещения) определяется скоростью западания выводов в отверстия и истечением воздуха из бесштоковой полости цилиндра 7 через дроссель Д2 в атмосферу.
10
венно микросхем, на печатные платы, содержащее ползун с установленными на нем вибратором и схватом, выполненным с двумя параллельными зажимными губками, и средство для изменения угла наклона радиоэлемента относительно продольной оси ползуна, о т- личающееся тем, что, с целью повьппения производительности, схват установлен на ползуне с возможностью вращения, средство для изменения угла наклона радиоэлемента выполнено в виде расположенного перПоложение микросхемы, соответствующее четвертой стадии установки, ког- 15 пендикулярно продольной оси ползуна да ,, фиксируется с помощью пневмоцилиндра со штоком установлен- геркона 15, коммутация контактов ко- ным с возможностью взаимодействия со торого осуществляется магнитным полем магнита 16, а точность совмеп1ения
осей каретки и устройства обёспечива- 20 пневмоцилиндру, а геометрическая ось ется регулируемым упором 14.
После того, как все выводызапали в отверстия платы на величину К1 (стадия III) и микросхема заняла горизонтальное положение, подается команда на включение ЭП114, распределяющего воздух давлением Р4 в мембранную коробку 4, которая осуществляет смещение устройства по оси Z и окончательную установку микросхемы на плате. Концы выводов микросхемы выходят с тыльной ст9р6ны платы на величину К2 (стадия IV) и подгибаются с помощью гибочного устройства (не показано) .
Губки 5 разводятся, освобождают микросхему и устройство готово для выполнения следующей операции установки. Формула изобретения
вращения схвата расположена под его зажимными губками со стороны торцов зажимных губок, расположенных с противоположной от пневмоцилиндров сто- 25 РОНЫ,
30 на ползуне взаимно перпендикулярно, и блоком управления вибратором, содержащим элементы сравнения, первые входы которых соединены с соответствующими выходами задатчика опорных
35 сигналов, а выходы через элемент ИЛИ подключены к входу регулятора, выход которого связан с вибратором, при этом вторые входы элементов сравнени являются соответствующими входами
40 блока управления вибратором, каждый из которых соединен с выходом соответствующего датчика ускорения.
0
венно микросхем, на печатные платы, содержащее ползун с установленными на нем вибратором и схватом, выполненным с двумя параллельными зажимными губками, и средство для изменения угла наклона радиоэлемента относительно продольной оси ползуна, о т- личающееся тем, что, с целью повьппения производительности, схват установлен на ползуне с возможностью вращения, средство для изменения угла наклона радиоэлемента выполнено в виде расположенного пер5 пендикулярно продольной оси ползуна пневмоцилиндра со штоком установлен- ным с возможностью взаимодействия со
пендикулярно продольной оси ползуна пневмоцилиндра со штоком установлен- ным с возможностью взаимодействия со
схватом, при этом схват подпружинен относительно ползуна в направлении к
20 пневмоцилиндру, а геометрическая ось
вращения схвата расположена под его зажимными губками со стороны торцов зажимных губок, расположенных с противоположной от пневмоцилиндров сто- 25 РОНЫ,
30 на ползуне взаимно перпендикулярно, и блоком управления вибратором, содержащим элементы сравнения, первые входы которых соединены с соответствующими выходами задатчика опорных
35 сигналов, а выходы через элемент ИЛИ подключены к входу регулятора, выход которого связан с вибратором, при этом вторые входы элементов сравнения являются соответствующими входами
40 блока управления вибратором, каждый из которых соединен с выходом соответствующего датчика ускорения.
Фиг. 1
10
физЛ
| Двухкамерный насос замещения для тяжелых пульп | 1961 |
|
SU147451A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
