(f
5| 2Г5Э:Ч
as;rs
tfte/
Изобретение OTHOCIITC/, , хватным устройствам„
Цель изобретения упрощение конструкции и повышение надежности работы устройства ,
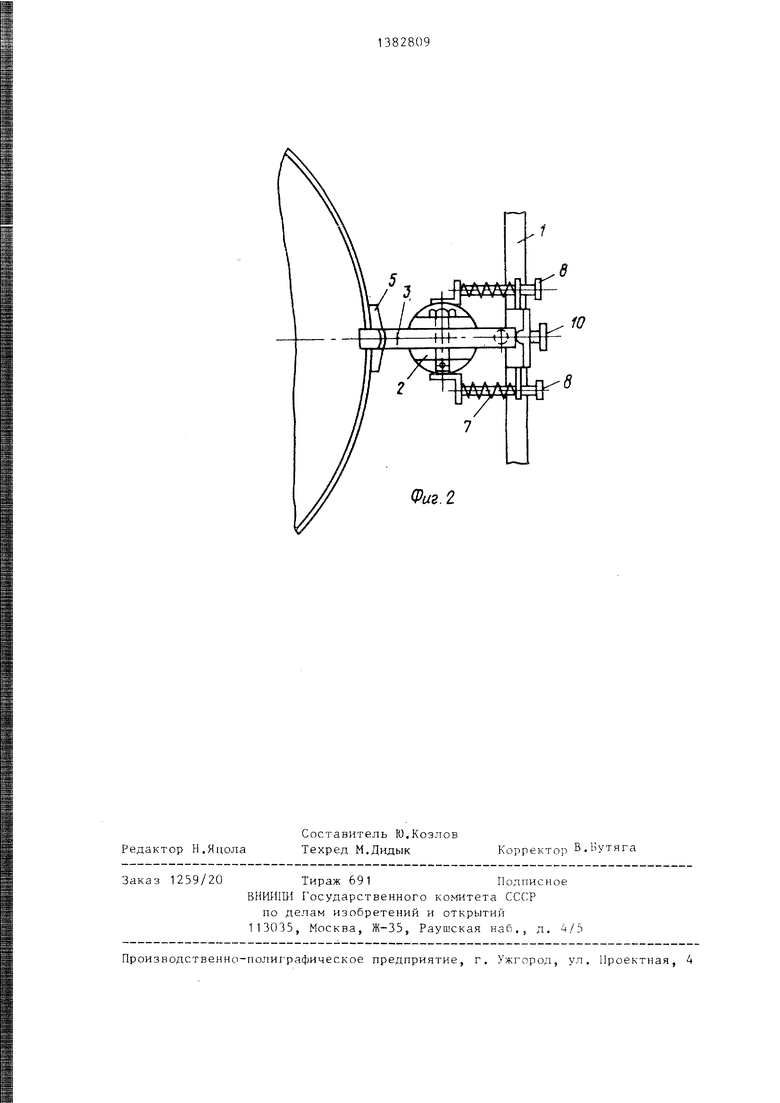
На фиг о 1 показано устройств о s, общий вид,; на фиг„ 2 - то же, разрез ,
Устройство состоит из рамы 1, с которой подвижно связана штанг-а 2, на которой установлен захватный орган, содержащий верхний зацеп 3 в виде двуплечего рычага и нижний зацеп 4, жестко закрепленный на штанге 2, в нижней части штанги 2 закреп лен упор 55 а сама штанга подпружинена прулсиной 6 1В вертикально - направлении и пружинами 7 в горизонтальном направлении. Пружины 7 центрируются штоками 85 установленными во втулках 9, закрепленных в аме К
Устройство монтируется на авто- или электропогрузчике взамен )зилоч- ных захватов посредством кронштейнов 10
Устройство работает следуюишм образом,
В свободном состоянии штанга 2 находится в крайнем верхнем и крайнем левом положении под воздействием пружин 6 и 7 о Верхний зацеп 3 повернут против часовой стрелки в крайнее верхнее положение. При наезде на бочку пружина 7 сжимается, обеспечивая контакт между упором 5, зацепок 4 и бочкой. Затем pat-Гу : перемещагот
ЬИСрХ НрК LlTi -i HepXHiiH ; liutA-рпчивается н захваты:- ; ет улор бо-г- ки сверху5 а нижний - захг атывает упор снизу, Лружина о с жима- етс:я до тех пор, пока .не пис нчойлс- : надежный захват бочки, linn опуск - НИИ изделия на. пол рама 1 изижет-; вниз, пружина 6 раснрямляеч Ся а ацепы ii и 3 освобождаются oi бички, Рама I выводит из зацепления нерхия;-: зацеп 3„ При Г1еремеи1ении рамы 1 з напрар лении от груза пружины / sam-i-- машт исходное положение
Захватное ус тройс .тро для бочек с упорами, содержащее вертикально
расположенную несущую раму и устакон- ленную на ней штангу„ в нижней части которой закреплен упор, а в верхней установлен захватный орган, включаю- щий в себя нижний и верхний зацепь, последний из KoropfjK предг.т авляет собой поворотный в вертикальной плоскости двуплечий рьтчаг, о т -т чающееся тем, что, с цел ь упрощения конструкции и попьпиении
надежности работы, нижний зап.еп жест- ко закреплен на штанге,, а д.вуплечий рычаг установлен с возможгюстью зацепления своим нерабочим плечом с рамой„ при этом щтанга подпружинепп о ;ч осительно рамы в горизонтальное и пертикальном направлениях,
в
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1985 |
|
SU1386546A1 |
| Грузозахватное устройство | 1987 |
|
SU1472409A1 |
| Захватное устройство | 1985 |
|
SU1306887A1 |
| Устройство для перегрузки рулонов | 1987 |
|
SU1546397A2 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1119757A1 |
| Захватное устройство для бочек с уторами | 1986 |
|
SU1386547A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1980 |
|
SU867481A1 |
| Ограничитель грузоподъемности крана | 1988 |
|
SU1604723A1 |

| Цициашвили М.Ю Грузозахватпь е устройства и приспособления для меха низации портоньгх | |||
| пе|)егрузочиьгх ра-- бот„ - М | |||
| г Транспорт, 1983, с„ 150., рис о 84 о |
