1
Изобретение относится к автоматике и вычислительной технике, в част- . ности к интерполируняцим устройствам для преобразования кодового значения соответствующего приросту функции в линейно изменяняцийся цифровой (унитарный) код, и может быть применено в цифровых приборах с графическим отображением информации. .
Цель изобретения - расширение области применения цифровых линейных интерполяторов на устройства, имеющие инерционные элементы движущихся частей и требующие экспоненциального закона разгона-торможения.
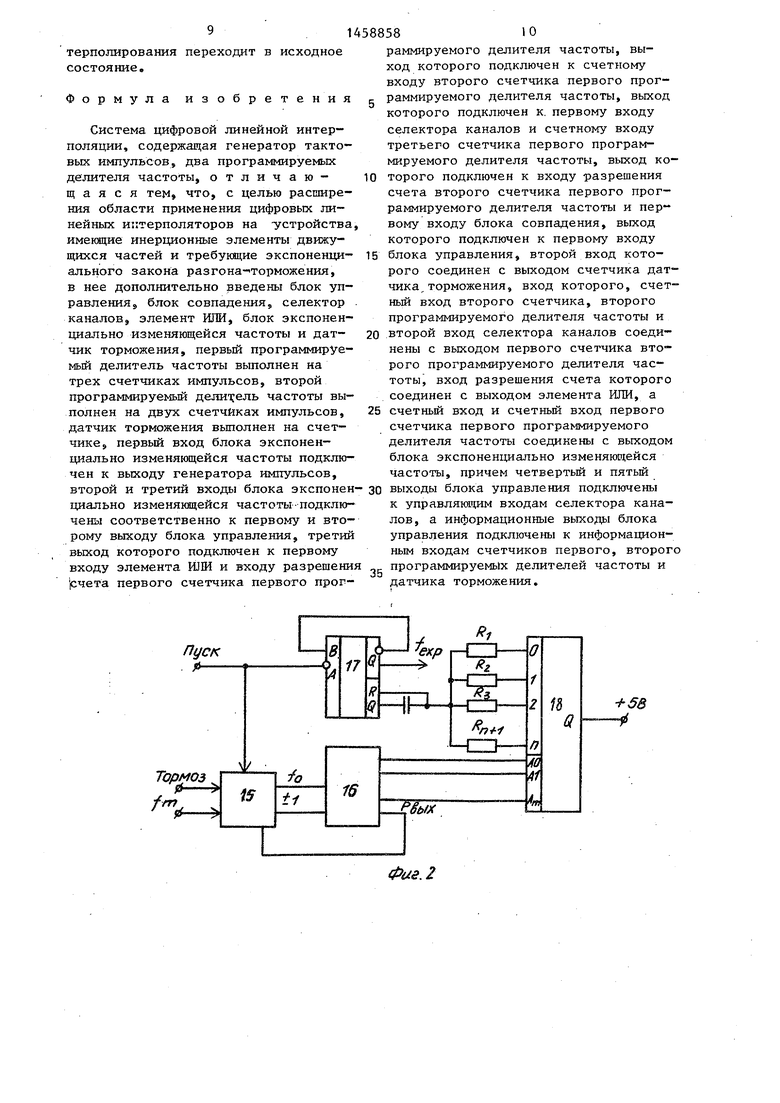
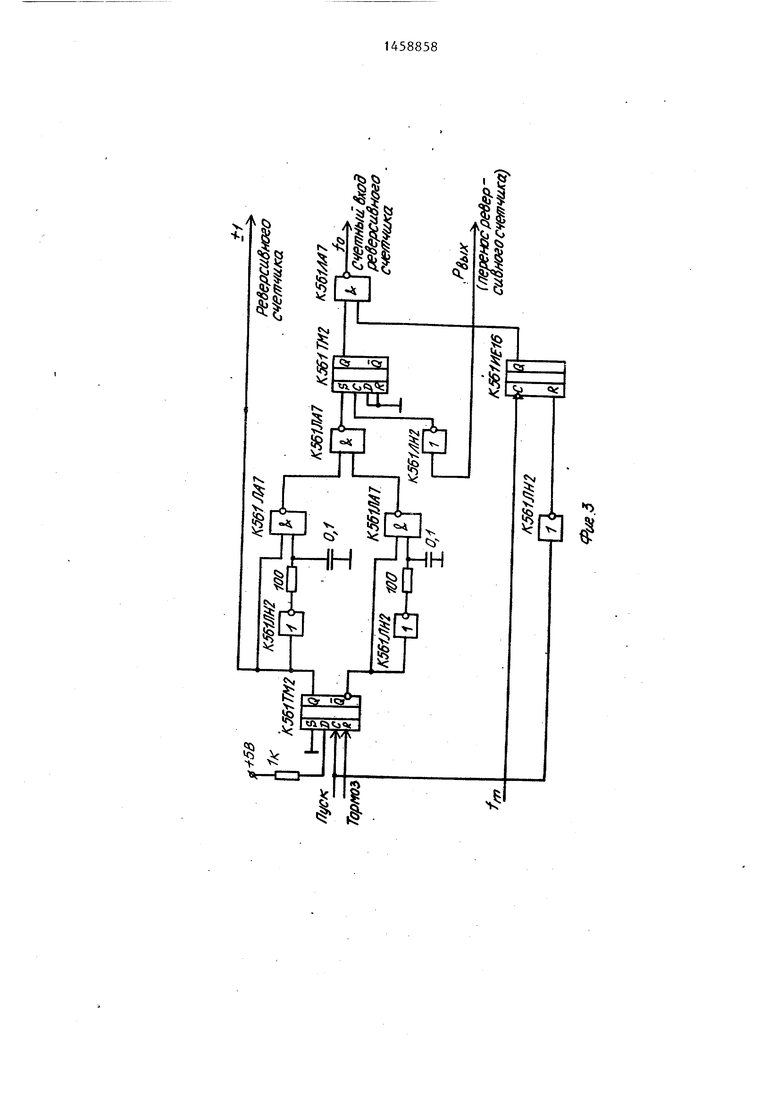
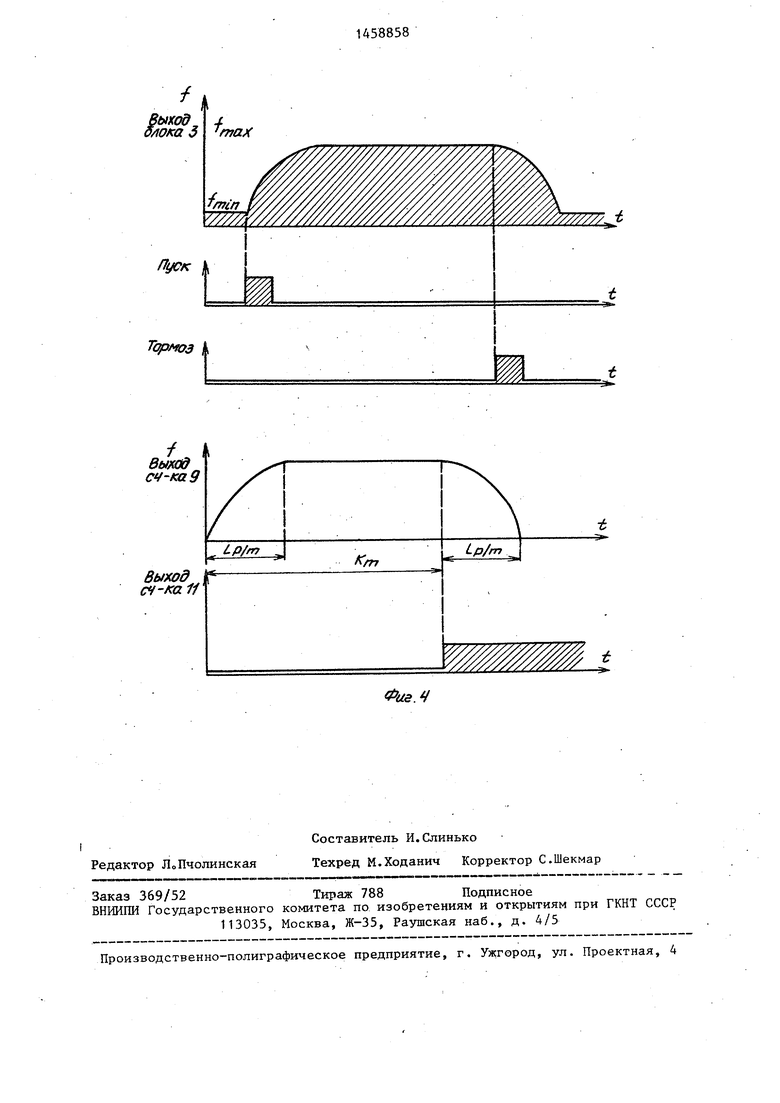
На фиг.1 показана блок-схема предлагаемой системы цифровой .линейной интерполяции; на фиг.2 - схема блока экспоненциально изменякяцейся частоты на фиг.З схема блока управления, являющегося составной частью блока экспоненциально изменяющейся частоты; на фиго 4 - временные диаграммы сигналов Пуск и Стоп и характер изменения выходной частоты блока 3 в зависимости от этих сигналов.
Система цифровой линейной интерполяции содержит блок 1 управления, генератор 2 тактовых импульсов, блок 3 экспоненциально изменякяцейся частоты, первьй программируемый делитель 4 частоты, состоящий из счетчиков 5 и 6, работающих в режиме делителей частоты, а также счетчика 7, работакнцего в режиме прерывания терминального счета, второй програм- мируемьш делитель 8 частоты, состоя
щий из счетчика 9, работакщего в режиме делителя частоты и счетчика 10, работакацего в режиме прерывания терминального счета, датчик 11 торможения, представляющий собой счетчик, работающий в режиме прерьтания терминального счета, блок 12 совпадения сигналов, элемент ИЛИ 13 и селектор 14 каналов (К555КП12).
Первый программируемый делитель 4 частоты может быть реализован на программируемом таймере КР580ВИ53,, второй программируемьм делитель 8 частоты и датчик 11 торможения - на программируемом таймере КР580ВИ53. Клок 1 управления может быть реализован на МП-комплекте серии КР580, а также на однокристальной микроЭВМ К1-81бВЕ48о
Выходы селектора каналов 14 являются выходами системы линейного интерполирования и служат для управления исполнительными механизмами перемещения пишущих устройств вдоль осей X и У как в прямом, так и в обратном направлениях (исполнительные механизмы не показаны).
Счетчики 5 и 6 первого программируемого делителя частоты 4 образуют делитель частоты, общий коэффициент деления которого рассчитывается блоком 1 управления по формуле
К,
К -ЭИ-
п+1
(1)
где К - коэффициент, определяемый исходя из необходимой точности вычисления формулы (1) ;
m - величина перемещения по одной из координат;
п - величина перемещения по
другой координате. Результат, вычислений формулы (1) Загружается блоком 1 управления в счетчики 5 и 6, составляющие в целом один делитель частоты. Последовательное соединение счетчиков позволяет получить общий коэффициент деления равный произведению коэффициентов деления каждого из счетчиков. Это позволяет получить высокую точность вычисления формулы (1), поскольку величина частного от деления т+1 быть целым числом, а
умножение результата на число К уменьшает погрешность округления частного :. от деления до целого числа в число раз, .равное величине Ко На выходе счетчика 6 в процессе интерполяции вырабатьшается частота, пропорциональная тангенсу угла наклона интерполируемой прямой. Другая частота унитарного кода вьфаба- тывается на выходе счетчика 9, коэффициент деления которого
V к(2)
Для определения момента окончания цикла интерполирования прямой используются -счетчики 7 и ТОо Большее значение перемещения загружается блоком 1 управления в счетчик 10, а меньшее - в счетчик 7
Выход счетчика 7 подключается к входу разрешения работы счетчика 6, а также на первый вход блока 12 совпадения. Выход счетчика 10 подключается через элемент ШШ 13 к входу разрешения работы счетчика 9, а также к второму входу блока 12 совпадения, выход которого подключен к первому входу блока 1 управления и сигнализирует о моменте окончания процесса линейного интерполирования.
Для обеспечения динамического разгона-торможения исполнительных механизмов в системе цифровой-линейной, интерполягщи имеется блок 3 экспоненциально изменяющейся частоты Блок 3 включен между генератором 2 тактовых импульсов и программируе№1ми делителями частоты. Экспоненциальная зависимость изменения частоты fp диктуется тем обстоятельством, что
588584
большинство электродвигателей для надежной отработки перемещений требуют обеспечения экспоненциального закона разгона-торможения с
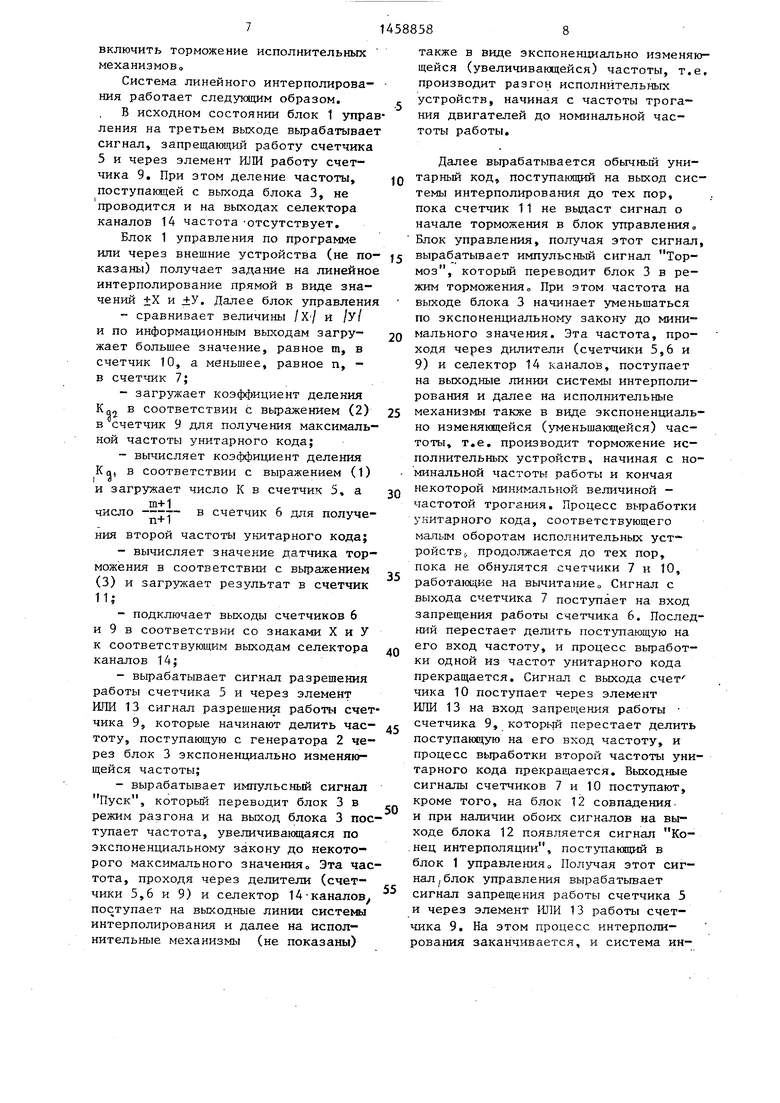
Функциональная схема блока экспоненциально изменяклдейся частоты представлена на фиг.2.
Основными элементами схемы являют- 10 ся одновибратор 17 (К155АГЗ), включенный по схеме генератора частоты, коммутатор 18 аналоговых сигналов (K561KII2), реверсивный счетчик 16 (К561Е11) и блок 13 управления. 15 Частота генерации одновибратора 17 определяется величиной емкости С и сопротивлением R, подключенным к источнику питания через ком 5утатор 18 аналоговых сигналов. Счетчик 16 20 задает адрес канала коммутатора, подключаемого к выходу/ коммутатора э Таким образом, резистор подключенный к источнику питания через ком гута- тор определяет код на выходе счетчи- 25 ка 16, а следовательно, и частоту генерации одновибратора 17о Величины резисторов R ,.o,R,,, рассчитываются таким образом, чтобы при их последовательном подключении к одно- 30 вибратору послелчий вырабатывал частоты, изменяемые по экспоненциальному закону. При этом величина резистора R, рассчитывается на минимальную частоту fn.;n, а R,, - на мак- 35 симальную f,. Блок 15 управления по сигналам Пуск и Тормоз пропускает частоту f, пропорциональную времени разгона-торможения (вре40
45
0
5
мени изменения частоты от f,,- до тох обратно до частоты ) и управляет направлением счета реверсивного счетчика. В исходном состоянии на выходе блока. 15 управления частота f., отсутствует, счетчик 16 сброшен в нулевое состояние, а еле- довательно, к источнику питания +5В через коммутатор 18 подключен резистор R . Вначале сигнал Пуск отсутствует, а следовательно, генерация частоты одновибратором 17 запрещена.
При поступлении сигнала Пуск генерация частоты одновибратором t7 разрешается и на выходе одновибратора появляется частота fg fni- Сигнал Пуск поступает одновременно и на блок 15 управления, который задает прямое направление счета реверсивного счетчика и начинает пропускать
частоту f на счетный вход реверсивного счетчика 16 (fp). Счетчик 16
начинает считать импульсы f и на
о о i его выходе, появляются коды / , ,
,.., 2, которые изменяют соответственно адресацию коммутатора 18о При этом к резисторам R, К,,.,.К,„, последовательно подключается источни питания +5В через коммутатор 18 и начинает изменяться частота генерации одновибратора 17 f exf Р достижении счетчиком 16 максимального значения счетных импульсов на вькоде Р. счетчика вырабатывается сигнал который поступает в блок 15 управления где запрещается дальнейшее прохождение частоты fpo На этом измена- частоты fexp прекращается. Часто
ние
та генерации устанавливается на мак симальном ее значении в соответствии с величиной сопротивления R, j и емкости Со Этот установившийся режим работы продолжается до тех nopj пока не поступит сигнал Тормоз который, воздействуя на блок 15 управления, заставляет его изменять направление счета реверсивного счетчика 16 на обратный, .При этом в блоке 15 управления разрешается прохождение частоты f, кото рая,поступая на-счетньй вход реверсивного счетчика 16, начинает изменять выходные коды последнего от 2 до Соответственно с этим из- меняется адресация коммутатора 18 и к источнику питания последовательно подключаются резисторы R, R
sRj . При этом изменяется и частота, генерации одновибратора 17
fgx от f )ах Д° т, и При достижен реверсивным счетчиком нулевого зна
чения, последний вырабатьгоает сигнал Р. поступакядий в блок 15 упDblX „
равления, где запрещается дальнейше прохождение частоты f и счетчик 19 остается в положении О, Заканчивается цикл работы блока экспоненциально изменяющейся частоты снятие сигнала Пуск и вся схема переходи в исходное состояние о
Блок экспоненциально изменяющейс частоты работает под управлением блока 1 управления, который вьфаба- тывает сигналы Пуск и Тормоз
Сигнал Пуск переводит блок 3 в режим разгона частоты от некоторой минимальной величины до максималь™ ного значения по экспоненциальному законуо Минимальное значение часто
10
58858
ты определяется характером используемых исполнительных механизмов, а именно частотой трогания электродви- р гателей.
Максимальное значение частоты определяется граничной частотой программируемых делителей 4 и 8 частоты (максимально возможной частотой, которую можно подавать на счетчики). Сигнал Тормоз переводит блок 3 в режим торможения частоты. При этом выходная частота блока 3 начинает уменьщаться от достигнутой (или мак- 15 симальной) величины до некоторого минимального значения по экспоненциальному закону.
Экспоненциально изменякицаяся-частота блока 3 делится счетчиками 5,6, и 9 в соответствии с формулами -(О н (2) и поступает с выхода счетчиков 6 и 9 через селектор 14 каналов, уп°- равляемьй от блока 1 управления на исполнительные механизмы (не показаны) по линиям +Х, -X, +У, -У также
20
25
в виде экспоненциальной зависимости частоты от времени
Счетчик 11 предназначен для оп- ределения момента начала торможения и является, фактически, датчиком торможения о Вход счетчика 11 подключен к выходу счетчика 9 и подсчитьшает количество импульсов максимальной частоты унитарного кода, соответствующих величине -перемещения на максимальной скорости.Счетчик 11 считывает в режиме вычитанияо Число, записываемое в счетчик 118 определяется
К„ m-Lp, ;
К,
р/п,
/2, (3)
5
где ю
0
Lp(m
К величина большего из заданных перемещения по одной из координат; величина разгона или торможения;
число, загружаемое в датчик торможения (счетчик 11). Во время линейного интерполирования счётчик 11 считает число импульсов, поступающих с выхода счетчика -9 и при достижении нуля выра- батьшает сигнал, поступающий с вых-о- да счетчика на блок 1 управления, сигнализируя о том, что необходимо
7
включить торможение исполнительных механизмово
Система линейного интерполирования работает следукжщм образом.
В исходном состоянии блок 1 упраления на третьем выходе вьфабатывае сигнал, запрещающий работу счетчика 5 и через элемент ШШ работу счетчика 9, При этом деление частоты, поступающей с выхода блока 3, не проводится и на выходах селектора каналов 14 частота отсутствует.
Блок 1 управления по программе или через внешние устройства (не показаны) получает задание на линейно интерполирование прямой в виде значений ±Х и +У. Далее блок управлени
-сравнивает величины /X / и /У/ и по информационным выходам загружает большее значение, равное т, в счетчик 10, а меньшее, равное п, - в счетчик 7;
-загружает коэффициент деления К„2 в соответствии с вьфажением (2) в счетчик 9 для получения максимальной частоты унитарного кода;
вычисляет коэффициент деления KQ, в соответствии с выражением (1) и загружает число К в счетчик 5, а
т+1
число ---- в счетчик 6 для получения второй частоты унитарного кода;
-вычисляет значение датчика торможения в соответствии с вьгражением (3) и загружает результат в счетчик 11;
-подключает выходы счетчиков 6
и 9 в соответствии со знаками X и У к соответствующим выходам селектора каналов 14;
-вьфабатывает сигнал разрешения работы счетчика 5 и через элемент ИЛИ 13 сигнал разрешения работы счетчика 9, которые начинают делить частоту, поступающую с генератора 2 через блок 3 экспоненциально изменяющейся частоты;
-вырабатывает импульсный сигнал Пуск, который переводит блок 3 в режим разгона и на выход блока 3 поступает частота, увеличивающаяся по экспоненциальному закону до некоторого максимального значения Эта частота, проходя через делители (счетчики 5,6 и 9) и селектор 14-каналов поступает на выходные линии cиcтe Я)I интерполирования и далее на исполнительные механизмы (не показаны)
10
15
20
5
0
5
0
5
0
5
также в виде экспоненциально изменяющейся (увеличивающейся) частоты, т.е, производит разгон исполнительных устройств, начиная с частоты трога- ния двигателей до номинальной частоты работы.
Далее вьфабатывается обычный унитарный код, поступагаций на выход системы интерполирования до тех пор, пока счетчик 11 не выдаст сигнал о начале торможения в блок управления Блок управления, получая этот сигнал, вырабатывает импульсный сигнал Тормоз, который переводит блок 3 в режим торможения При этом частота на выходе блока 3 начинает уменьшаться по экспоненциальному закону до минимального значения. Эта частота, проходя через дилители (счетчики 5,6 и 9) и селектор 14 каналов, поступает на выходные линии системы интерполирования и далее на исполнительные механизмы также в виде экспоненциально изменякщейся (уменьшающейся) частоты, т,е, производит торможение исполнительных устройств, начиная с номинальной частоты работы и кончая некоторой минимальной величиной - частотой трогания. Процесс вьфаботки унитарного кода, соответствующего ма,пым оборотам исполнительных устройств,, продо нжается до тех пор, пока не обнулятся счетчики 7 и 10, работающие на вычитание„ Сигнал с выхода счетчика 7 поступает на вход запрещения работы счетчика 6. Последний перестает делить поступающую на его вход частоту, и процесс вьфаботки одной из частот унитарного кода прекращается. Сигнал с выхода счет чика 10 поступает через элемент ШШ 13 на вход запрещения работы счетчика 9, которьт перестает делить поступающую на его вход частоту, и процесс вьфаботки второй частоты унитарного кода прекращается. Выходные сигналы счетчиков 7 и 10 поступают, кроме того, на блок 12 совпадения- и при наличии обоих сигналов на выходе блока 12 появляется сигнал Ко- .нец интерполяции, пост т1ающий в блок 1 управления о Получая этот сигнал, блок управления вырабатьгоает сигнал запрещения работы счетчика 5 и через элемент ИЛИ 13 работы счетчика 9. На этом процесс интерполирования заканчивается, и система интерполированиясостояние.
переходит в исходное
Формула изобретения
Система цифровой линейной интерполяции, содержащая генератор тактовых импульсов, два программируемых делителя частоты, отличающаяся тем, что, с целью расширения области применения цифровых линейных интерполяторов на -устройства имеющие инерционные элементы движущихся частей и требующие экспоненциального закона разгона- торможения, в нее дополнительно введены блок управления блок совпадения, селектор каналов, элемент ИЛИ, блок экспоненциально изменяющейся частоты и датчик торможения, первый программируемый делитель частоты выполнен на трех счетчиках импульсов, второй программируемый делит ель частоты выполнен на двух счетчиках импульсов, датчик торможения вьшолнен на счетчике, первый вход блока экспоненциально изменяющейся частоты подключен к выходу генератора импульсов.
раммируемого делителя частоты, выход которого подключен к счетному входу второго счетчика первого программируемого делителя частоты, выход которого подключен к. первому входу селектора каналов и счетному входу третьего счетчика первого программируемого делителя частоты, выход ко-
торого подключен к входу разрешения счета второго счетчика первого программируемого делителя частоты и первому входу блока совпадения, выход которого подключен к первому входу
блока управления, второй вход которого соединен с выходом счетчика датчика, торможения, вход которого, счет- ньш вход второго счетчика, второго программируемого делителя частоты и
второй вход селектора каналов соединены с выходом первого счетчика второго программируемого делителя частоты, вход разрешения счета которого соединен с выходом элемента ИЛИ, а
счетньй вход и счетный вход первого счетчика первого программируемого делителя частоты соединены с выходом блока экспоненциально изменяющейся частоты, причем четвертый и пятьй
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| Устройство задания скорости в системах числового программного управления | 1986 |
|
SU1328793A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1987 |
|
SU1481714A2 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1810978A1 |
| Позиционный дискретный электропривод | 1985 |
|
SU1352474A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для программного управления | 1986 |
|
SU1397880A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1386964A1 |
Изобретение относится к области автоматики и вычислительной техники, в частности к интерполирутацим устройствам, и может быть применено в системах автоматизированного проектирования. Цель изобретения - расши
второй и третий входы блока экспонен- ЗО выходы блока управления подключены
циально изменяющейся частоты-подключены соответственно к первому и второму выходу блока управления, третий выход которого подключен к первому
к управляю1цим входам селектора каналов, а информационные выходы блока
управления подключены к информационным входам счетчиков первого, второго входу элемента ШШ и входу разрешения программируемых делителей частоты и 1счета первого счетчика первого прог- датчика торможения.
к управляю1цим входам селектора каналов, а информационные выходы блока
-i-бВ
Фи$.2
S S.
hВыход, о/1ока 5
Вь&(С0
i-P/m
Выход , сч-ка 11
Л/77
Lp/m
Фиа.
| Цифровой линейный интерполятор | 1975 |
|
SU551611A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровой линейный интерполятор | 1980 |
|
SU875341A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
