4
о
СП
о кэ
СХ)
14
Изобретение относится к автоматике и вычислительной технике и может быть использовано в магистрально-мо- дульных системах программного управления электроприводом, например в графопостроителях, координатных столах, автоматах с программным управлением или промышленных роботах.
Цель изобретения - расширение функ-jQ которая преобразуется первым управциональных возможностей за счет программирования минимальной скорости перемещения .
На фиг. 1 представлена структурноляемым делителем 2 частоты в выходн частоту, а его второй выход являетс выходом частоты разгона-торможения, которая преобразуется вторым управл
ляемым делителем 2 частоты в выходн частоту, а его второй выход являетс выходом частоты разгона-торможения, которая преобразуется вторым управл
функциональная схема модуля; на фиг.2-55 емым делителем 3 частоты в частоту
20
25
30
35
структура регистра задания; на фиг.3- структурная схема мультиплексора; на фиг, 4 - график отработки заданного перемещения; на фиг. 5-возможные направления перемещений в зависимости от значений управляемых входом мультиплексора .
Модуль (фиг. 1) содержит генер-атор i, первый и второй управляемые делители 2 и 3 частоты, регистр 4 задания, реверсивный счетчик 5 импульсов, суммирующий счетчик 6 разгона, вычитающий счетчик 7 перемещения, блок 8 совпадения, первый формирователь 9 мультиплексор 10, первый и второй элементы И 11 и 12, RS-триггер 13, элемент ИЛИ 14, вычитающий счетчик 15 максимальной скорости, регистр 16 минимальной скорости, второй формирователь 17, первый и второй D-триг- геры 18 и 19, а также третий элемент И 20.
В качестве управляемых делителей 2 и 3 частоты .может быть применена, например, микросхема 155ИЕ8 бКО.348:006 ТУП, у которой коэффициент деления зависит от кода на управляющих входах.
В модуле Разгон-2 может быть также применена микросхема, например Программируемый таймер КР 580 ВИ53, причем на одной такой микросхеме можно одновременно реализовать вычитающий счетчик 15, максимальной скорости, вычитающий счетчик 7 перемещения и первый формирователь 9. При этом дополнительно расширяются функциональные возможности модуля Разгон-2, так как указанная микросхема позволяет хранить первоначально занесенные коды. Следовательно, отпадает необхо-55 димость задания величины максимальной скорости и величины перемещения в на- чале каждого цикла перемещения, на40
45
50
счета реверсивного счетчика 5 импул сов, которая характеризует величину ускорения разгона-торможения. Регис 4 задания принимает с магистрали да ных и хранит код величины ускорения разгона-торможения, определяющий ко эффициент деления второго управляем го делителя 3 частоты, а также знач ния управляющих сигналов х, -х, у, для мультиплексора 10 и признак ра бота, определяющий состояние шины Разрешение разгона. Реверсивный счетчик 5 импульсов суммирует импульсы частоты разгона-торможения при разгоне и вычитает при торможении, его разрядные выходы определяю коэффициент деления первого управля емого делителя 2 частоты.
Суммирующий счетчик 6 разгона ве дет подсчет импульсов разгона, а вы читающий счетчик 7 перемещения вычи тает каждый импульс выходной частот из величины заданного перемещения, причем его нулевой выход свидетельствует об окончании отработки задан ного перемещения. Блок 8 совпадения определяет момент начала торможения путем сравнивания текущего кода выч тающего счетчика 7 перемещения с чи лом импульсов разгона суммирующего счетчика 6 разгона, а первый формир ватель 9 формирует выходные импульс с заданными параметрами, например длительностью.
Мультиплексор 10 в зависимости о значений управляющих входов вьщает импульсы выходной частоты на один и выходов X, -X, у, -у или на одну из пар выходов (+х. +у), (х, -у), (-х, -у), (-Х, у). Первый и второй элеме ты И 11 и 12 разрешают счет реверси ного счетчика 5 импульсов соответст венно пр разгоне или торможении. RS-триггер 13 управляет разрешением
пример, значение величин максимальной и минимальной скоростей перемещения может быть задано один раз в начале работы, что повышает быстродействие модуля Разгон-2.
Генератор 1 вырабатывает постоянную частоту, причем его первый выход является выходом опорной частоты.
ляемым делителем 2 частоты в выходную частоту, а его второй выход является выходом частоты разгона-торможения, которая преобразуется вторым управляемым делителем 3 частоты в частоту
0
5
0
5
5
0
5
0
счета реверсивного счетчика 5 импульсов, которая характеризует величину ускорения разгона-торможения. Регистр 4 задания принимает с магистрали данных и хранит код величины ускорения разгона-торможения, определяющий коэффициент деления второго управляемого делителя 3 частоты, а также значения управляющих сигналов х, -х, у, -у для мультиплексора 10 и признак работа, определяющий состояние шины Разрешение разгона. Реверсивный счетчик 5 импульсов суммирует импульсы частоты разгона-торможения при разгоне и вычитает при торможении, его разрядные выходы определяют коэффициент деления первого управляемого делителя 2 частоты.
Суммирующий счетчик 6 разгона ведет подсчет импульсов разгона, а вычитающий счетчик 7 перемещения вычитает каждый импульс выходной частоты из величины заданного перемещения, причем его нулевой выход свидетельствует об окончании отработки заданного перемещения. Блок 8 совпадения определяет момент начала торможения путем сравнивания текущего кода вычитающего счетчика 7 перемещения с числом импульсов разгона суммирующего счетчика 6 разгона, а первый формирователь 9 формирует выходные импульсы с заданными параметрами, например длительностью.
Мультиплексор 10 в зависимости от значений управляющих входов вьщает импульсы выходной частоты на один из выходов X, -X, у, -у или на одну из пар выходов (+х. +у), (х, -у), (-х, -у), (-Х, у). Первый и второй элементы И 11 и 12 разрешают счет реверсивного счетчика 5 импульсов соответственно пр разгоне или торможении. RS-триггер 13 управляет разрешением
торможения, а элемент ИЛИ 14 сбрасы- вает первый D-триггер 18, управляющий разрешением разгона, тем самым запрещая разгон. Вычитающий счетчик 15 максимальной скорости вычитает каждый импульс частоты разгона-торможения из кода, соответствующего максимальной величине скорости, и его нулевой выход свидетельствует о достижении максимальной величины скорости.
Регистр 16 минимальной скорости Хранит значение кода, соответствующее минимальной скорости перемещения, а также передает это значение на реверсивный счетчик 5 импульсов. Второй D-триггер 19 управляет разрешением перемещения, т.е. разрешением прохождения через третий элемент И 20 им г пульсов опорной частоты на тактовьй вход первого управляемого делителя 2 частоты при выдаче признака отработки заданного перемещения вторым формирователем 17.
Модуль работает следующим образом.
Перед началом работы модуль (фиг.1) устанавливается в исходное состояние
вход реверсивного счетчика 5, суммирующий вход реверсивного счетчика 5 и на вход первого управляемого дели- . теля 2 частоты.
На тактовые входы первого и второго управляемых делителей 2 и 3 частоты подается соответственно опорная частота F через третий элемент И 19
10 (максимально допустимая частота на выходе модуля) и частота разгона- торможения F, (максимально допустимая частота разгона модуля).
Выходные частоты Г,, и F, являются
15 независимыми, поскольку обеспечивают независимые параметры: F - скорость перемещения электропривода, F, - величину ускорения при разгоне-торможении. При этом частота F выбирается
20 по максимально допустимой скорости перемещения электропривода и равна максимально допустимой частоте на координатных выходах модуля, а F, - по максимально допустимой величине
25 ускорения разгона-торможения.
Частота импульсов на выходах управляемых делителей частоты определяется коэффициентом деления - кодом, поступающим на их управляющие входы.
(например, командами Z и С при выпол- зо Частота импульсов F на выходе второнении модуля в стандарте КАМАК).
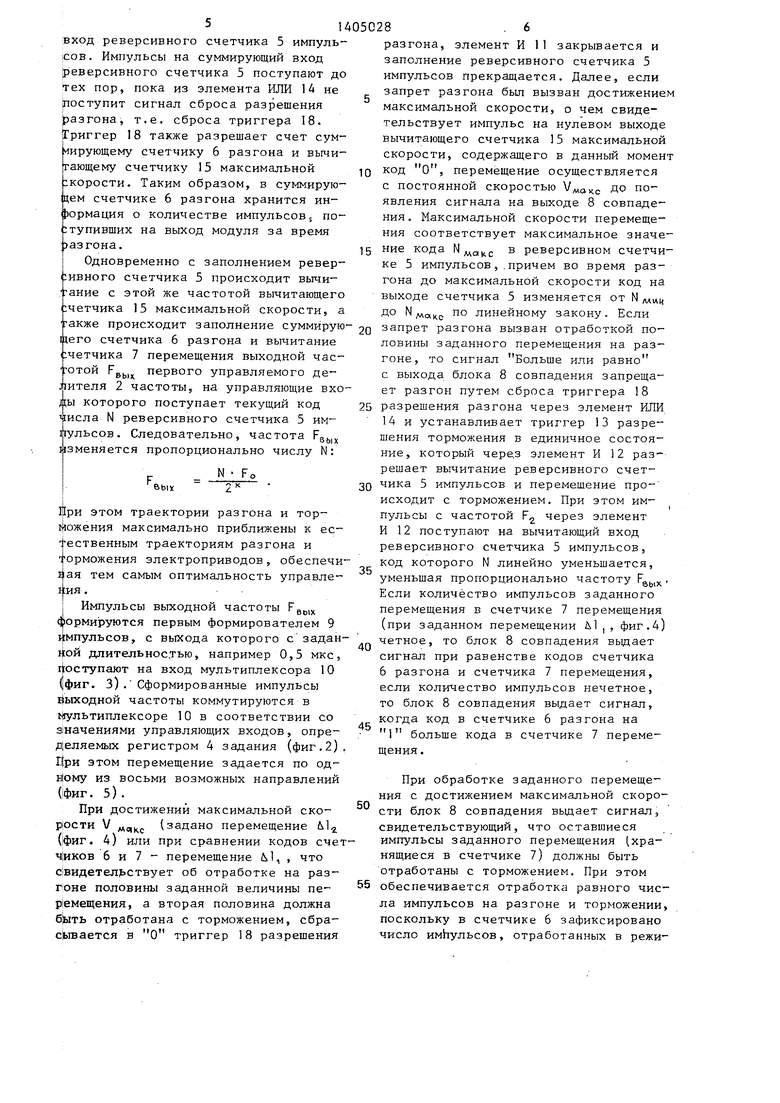
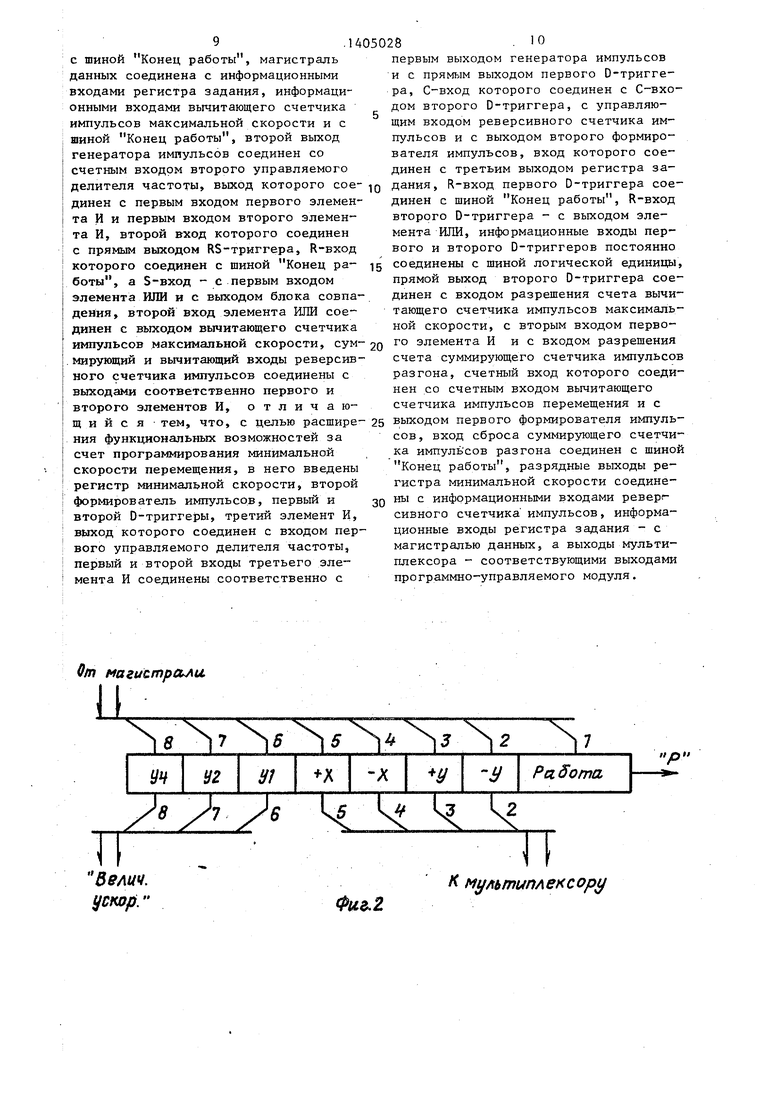
В начале цикла из магистрали данных заполняется .регистр 4 задания (фиг. 2), куда заносятся код величины ускорения разгона-торможения, значения управляю1цих входом мультиплексора 10 (фиг. З) в зависимости от требуемого направления перемещения и признак Работа, являющийся пуском модуля, а также заносится код величины требуемого перемещения в вычитающий счетчик 7 перемещения, код величины максимальной скорости перемещения в вычитающий- счетчик 15 максимальной скорости и код величины -максимальной скорости перемещения в регистр 16 минимальной скорости.
Занесение информации в регистр 4 задания должно производиться после занесения информации в счетчики 7 и 15. и регистр 16, так как с появлени-м ем 1 в разряде Работа происходит пуск модуля.
в первоначальньй момент, до установления в 1. признака Работа в регистре 4 задания, выходы триггеров 13) 18 и 19 установлены в О и, таким образом, запрещают передачу имп пульсов соответственно на вьгчифакяций
го управляемого делителя 3 частоты п - F,
2
2к
35 где п - код, соответствующий заданному ускорению разгона-торможения, поступающий из регистра 4 задания на управляющие входы делителя 3 частоты.
40
45
50
55
Импульсы с постоянной частотой F , соответствующей заданному ускорению, поступают на первые входы элементов И II и 12. При установлении признака Работа регистра 4 задания в 1 второй формирователь 17 формирует короткий импульс, который перезаписывает значение минимальной скорости перемещения из регистра 16 минимальной скорости в реверсивный счетчик 5. По заднему фронту этого импульса происходит установка триггеров 18 и 19 в 1. Эти триггеры открывают соответственно первый элемент И 11 и третий элемент И 20. Частота, соответствующая коду величины ускорения разгона-торможения, т.е. коэффициенту деления второго управляемого делителя 3 частоты, подается на суммирующий
вход реверсивного счетчика 5, суммирующий вход реверсивного счетчика 5 и на вход первого управляемого дели- теля 2 частоты.
На тактовые входы первого и второго управляемых делителей 2 и 3 частоты подается соответственно опорная частота F через третий элемент И 19
(максимально допустимая частота на выходе модуля) и частота разгона- торможения F, (максимально допустимая частота разгона модуля).
Выходные частоты Г,, и F, являются
независимыми, поскольку обеспечивают независимые параметры: F - скорость перемещения электропривода, F, - величину ускорения при разгоне-торможении. При этом частота F выбирается
по максимально допустимой скорости перемещения электропривода и равна максимально допустимой частоте на координатных выходах модуля, а F, - по максимально допустимой величине
ускорения разгона-торможения.
Частота импульсов на выходах управляемых делителей частоты опредеяется коэффициентом деления - кодом, поступающим на их управляющие входы.
астота импульсов F на выходе второго управляемого делителя 3 частоты п - F,
2
2к
35 где п - код, соответствующий заданному ускорению разгона-торможения, поступающий из регистра 4 задания на управляющие входы делителя 3 частоты.
40
45
50
55
Импульсы с постоянной частотой F , соответствующей заданному ускорению, поступают на первые входы элементов И II и 12. При установлении признака Работа регистра 4 задания в 1 второй формирователь 17 формирует короткий импульс, который перезаписывает значение минимальной скорости перемещения из регистра 16 минимальной скорости в реверсивный счетчик 5. По заднему фронту этого импульса происходит установка триггеров 18 и 19 в 1. Эти триггеры открывают соответственно первый элемент И 11 и третий элемент И 20. Частота, соответствующая коду величины ускорения разгона-торможения, т.е. коэффициенту деления второго управляемого делителя 3 частоты, подается на суммирующий
вход реверсивного счетчика 5 импульсов. Импульсы на суммирующий вход реверсивного счетчика 5 поступают до гех пор, пока из элемента ИЛИ 14 не поступит сигнал сброса разрешения разгона, т.е. сброса триггера 18. Триггер 18 также разрешает счет суммирующему счетчику 6 разгона и вычи- ающему счетчику 15 максимальной :корости. Таким образом, в суммирую- ;цем счетчике 6 разгона хранится ин- юрмация о количестве импульсовj по- ;тупивших на выход модуля за время эазгона.
Одновременно с заполнением ревер- (ивного счетчика 5 происходит вычи- ание с этой же частотой вычитающего ;четчика 15 максимальной скорости, а
разгона, злемент И 11 закрывается и заполнение реверсивного счетчика 5 импульсов прекращается. Далее, если запрет разгона был вызван достижением максимальной скорости, о чем свидетельствует импульс на нулевом выходе вычитающего счетчика 15 максимальной скорости, содержащего в данньш момент
код О, перемещение осуществляется с постоянной скоростью .c ДО появления сигнала на выходе 8 совпадения. Максимальной скорости перемещения соответствует максимальное значение кода реверсивном счетчике 5 импульсов,.причем во время разгона до максимальной скорости код на выходе счетчика 5 изменяется от N до N по линейному закону. Если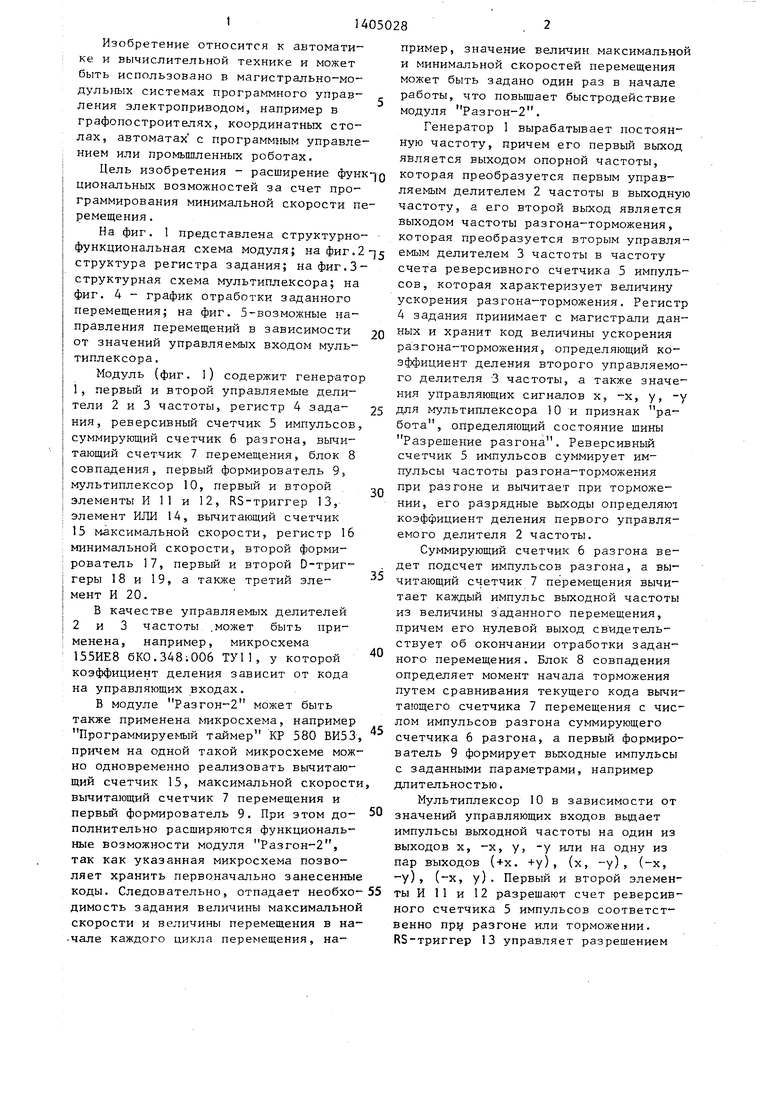
| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327060A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1386964A1 |
| Устройство для дробления стружки | 1982 |
|
SU1103199A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Преобразователь сдвига фазы в код скорости и ускорения | 1986 |
|
SU1358096A1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в магист- рально-МОдульных системах программного управления электроприводом. Целью изобретения является расширение функциональных возможностей за счет программирования минимальной скорости перемещения. В состав программно-управляемого модуля входят генератор 1 импульсов, первый и второй управляемые делители 2 и 3 частоты, регистр 4задания, реверсивный счетчик 5, суммирующий счетчик 6 разгона, вычитающий счетчик 7 перемещения, блок 8 совпадения, первый формирователь 9, мультиплексор 10, первый и второй элементы И 11 и 12, RS-триггер 13, элемент ИЛИ 14, вычитающий счетчик 15 максимальной скорости, второй формирователь 17, первый и второй D-триг- геры 18 и 19, третий элемент И 20. Преимущество изобретения состоит в расширении функциональных возможностей и повышении производительности управляемых автоматов за счет оптимизации динамических характеристик. 5ил. сл
также происходит заполнение суммирую- 2Q запрет разгона вызван отработкой поцего счетчика о разгона и вычитание :четчика 7 перемещения выходной час- готой Fgjjij первого управляемого де- Лителя 2 частоты, на управляющие вхо- Жы которого поступает текущий код исла N реверсивного счетчика 5 импульсов. Следовательно, частота изменяется пропордионально числу N:
N F
вых
1|1ри этом траектории разгона и тор- 1|1ожения максимально приближены к ес- ественным траекториям разгона и торможения электроприводов, обеспечи ная тем самым оптимальность управле1 ИЯ .
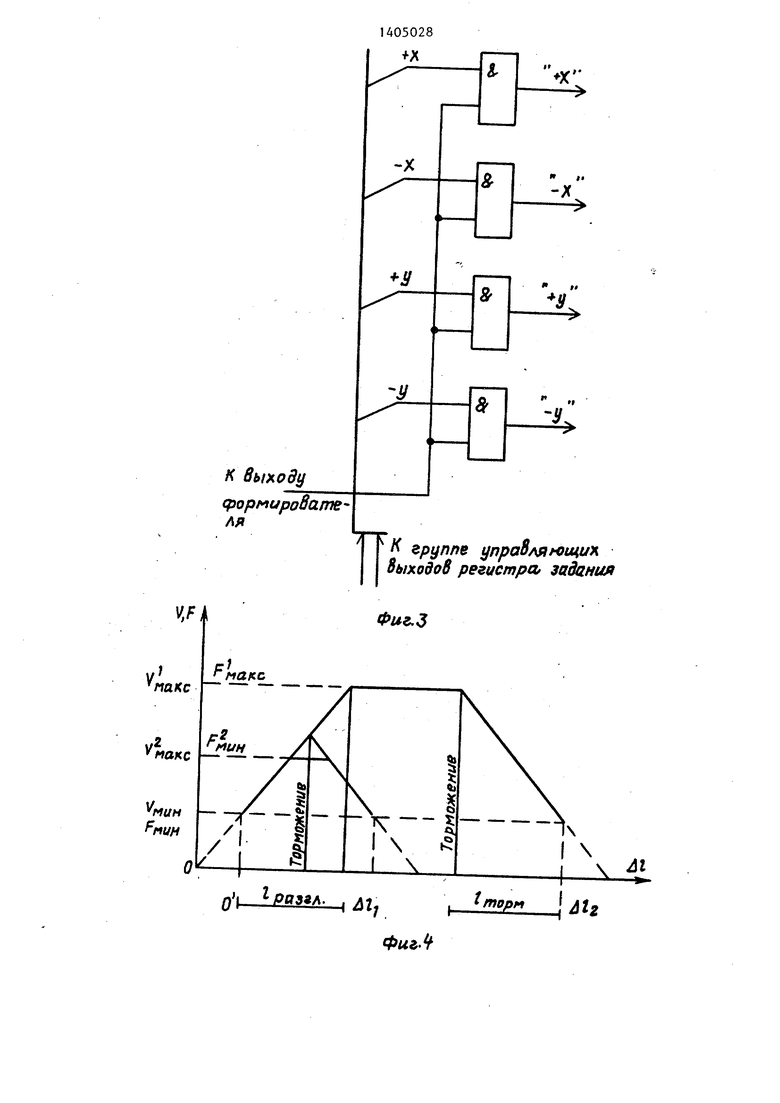
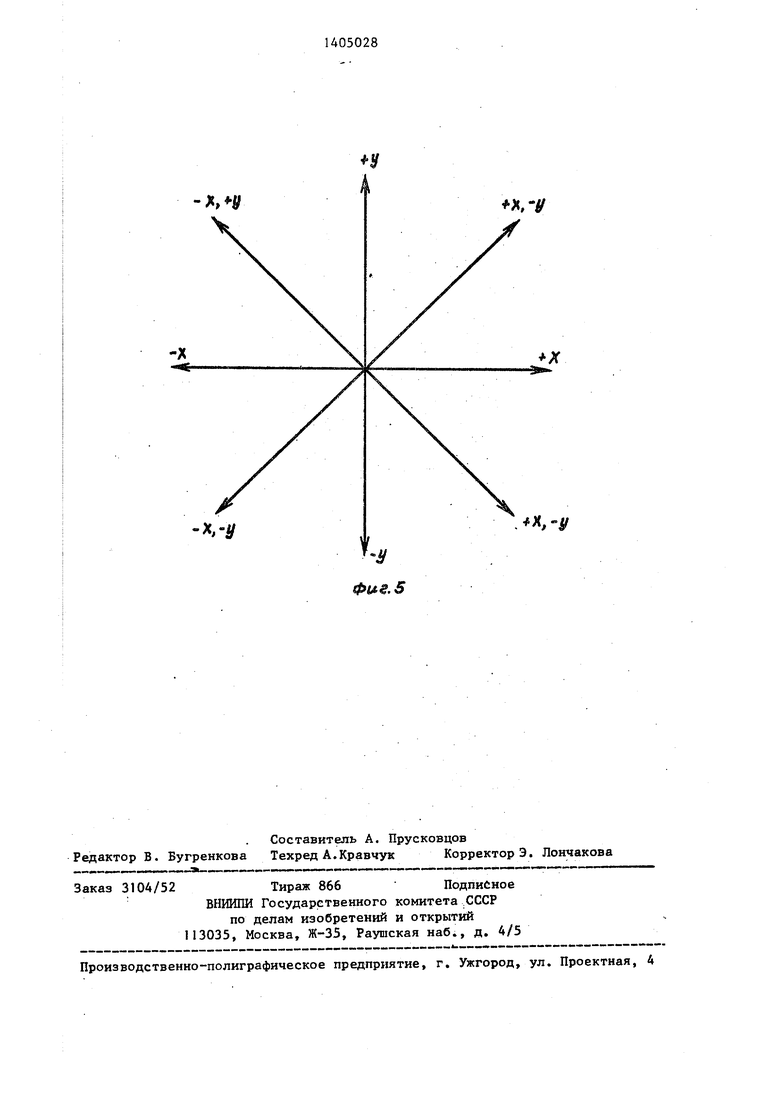
I Импульсы выходной частоты Рц, формируются первым формирователем 9 мпульсов, с выхода которого с заданной длительностью, например 0,5 мкс, Поступают на вход мультиплексора 10 (фиг. З) . Сформированные импульсы йыкодной частоты коммутируются в Мультиплексоре 10 в соответствии со з начениями управляющих входов, определяемых регистром 4 задания (фиг.2) Г(ри этом перемещение задается по од- к|ому из восьми возможных направлений (фиг. 5) .
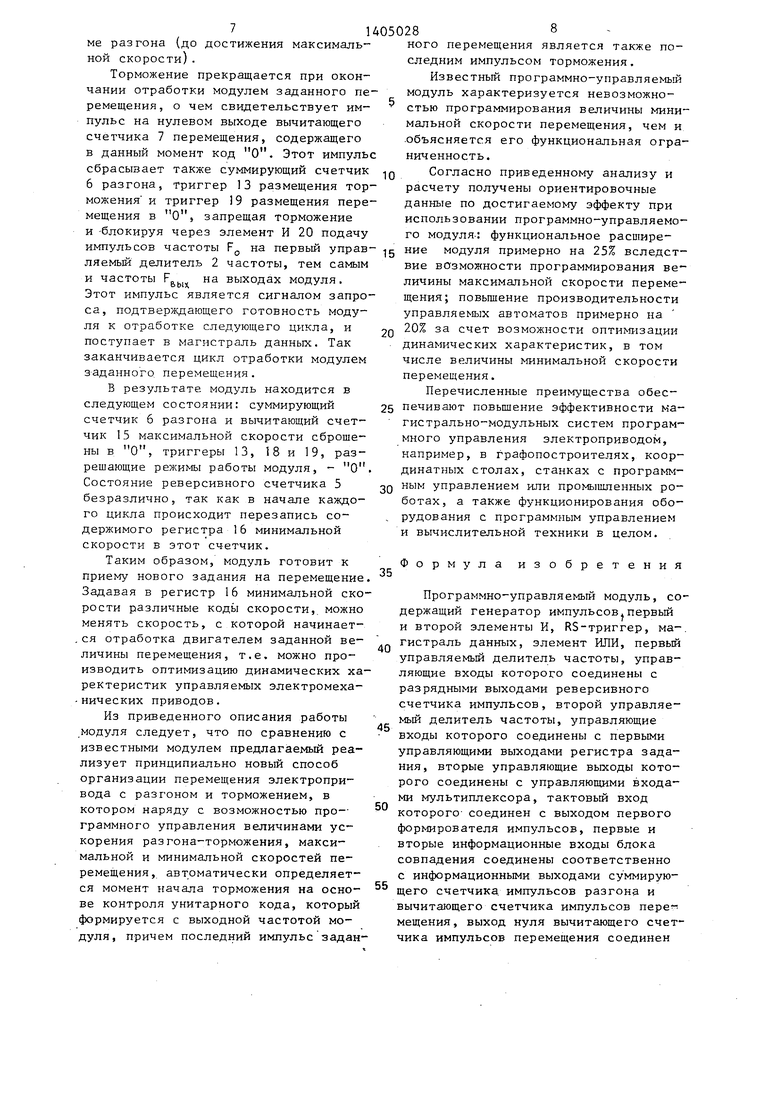
При достижений максимальной ско- ptOCTH V ,. (задано перемещение 1 (|фиг, 4) или при сравнении кодов счечиков 6 и 7 - перемещение 1, , что С видетел ствует об отработке на разгоне половины заданной величины пе- р|емещения, а вторая половина должна 6feiTb отработана с торможением, сбра- сМвается s О триггер 18 разрешения
0
ловины заданного перемещения на разгоне, то сигнал Больше или равно с выхода блока 8 совпадения запрещает разгон путем сброса триггера 18 5 разрешения разгона через элемент ИЛИ 14 и устанавливает триггер 13 разре- дления торможения в единичное состояние, который чере.з элемент И 12 разрешает вычитание реверсивного счетчика 5 импульсов и перемещение про- исходит с торможением. При этом импульсы с частотой F через элемент И 12 поступают на вычитающий вход реверсивного счетчика 5 импульсов, код которого N линейно уменьшается, уменьщая пропорционально частоту Р,, . Если количество импульсов заданного перемещения в счетчике 7 перемещения (при заданном перемещении Л1,, фиг.4) четное, то блок 8 совпадения выдает сигнал при равенстве кодов счетчика 6 разгона и счетчика 7 перемещения, если количество импульсов нечетное, то блок 8 совпадения выдает сигнал, когда код в счетчике 6 разгона на 1 больше кода в счетчике 7 перемещения .
5
0
5
При обработке заданного перемещения с достижением максимальной скорости блок 8 совпадения вьщает сигнал, свидетельствующий, что оставшиеся импульсы заданного перемещения (хранящиеся в счетчике 7) должны быть отработаны с торможением. При этом обеспечивается отработка равного числа импульсов на разгоне и торможении, поскольку в счетчике 6 зафиксировано число имНульсов, отработанных в режиме разгона (до достижения максимальной скорости).
Торможение прекращается при окончании отработки модулем заданного перемещения, о чем свидетельствует им- пульс на нулевом выходе вычитающего счетчика 7 перемещения, содержащего в данный момент код О. Этот импульс сбрасывает также суммирующий счетчик 6 разгона, триггер 13 размещения торможения и триггер 9 размещения перемещения в О, запрещая торможение и -блокируя через элемент И 20 подачу
20
импульсов частоты F на первый управ- g ние модуля примерно на 25% вследствие возможности программирования величины максимальной скорости перемещения; повьшение производительности управляемых автоматов примерно на 20% за счет возможности оптимизации динамических характеристик, в том числе величины минимальной скорости перемещения.
Перечисленные преимущества обес- 25 печивают повышение эффективности ма- гистрально-модульных систем программного управления электроприводом, например, в графопостроителях, координатных столах, станках с программным управлением или промышленных роботах, а также функционирования оборудования с программным управлением и вычислительной техники в целом.
ляемьш делитель 2 частоты, тем самым и частоты на выходах модуля. Этот импульс является сигналом запроса, подтверждающего готовность модуля к отработке следующего цикла, и поступает в магистраль данных. Так заканчивается цикл отработки модулем заданного, перемещения .
В результате, модуль находится в следующем состоянии: суммирующий счетчик б разгона и вычитающий счетчик 15 максимальной скорости сброшены в О, триггеры 13, 18 и 19, разрешающие режимы работы модуля, - О. Состояние реверсивного счетчика 5 безразлично, так как в начале каждого цикла происходит перезапись содержимого регистра 16 минимальной скорости в этот счетчик.
Таким образом, модуль готовит к приему нового задания на перемещение. Задавая в регистр 16 минимальной скорости различные коды скорости, можно менять скорость, с которой начинает.ся отработка двигателем заданной величины перемещения, т.е. можно производить оптимизацию динамических ха- ректеристик управляемых электромеха-нических приводов.
Из приведенного описания работы .модуля следует, что по сравнению с известными модулем предлагаемый реализует принципиально новый способ организации перемещения электропривода с разгоном и торможением, в котором наряду с возможностью про-- граммного управления величинами ускорения разгона-торможения, максимальной и минимальной скоростей перемещения, автоматически определяется момент начала торможения на основе контроля унитарного кода, который формируется с выходной частотой модуля, причем последний импульс задан30
35
40
45
50
55
Формула изобретения
Программно-управляемый модуль, содержащий генератор импульсов первый и второй элементы И, RS-триггер, ма-. гистраль данных, элемент ИЛИ, первый управляемый делитель частоты, управляющие входы которого соединены с разрядными выходами реверсивного счетчика импульсов, второй управляе- мьш делитель частоты, управляющие входы которого соединены с первыми управляющими выходами регистра задания, вторые управляющие вькоды которого соединены с управляющими входами мультиплексора, тактовый вход которого- соединен с выходом первого формирователя импульсов, первые и вторые информационные входы блока совпадения соединены соответственно с информационными выходами суммирующего счетчика, импульсов разгона и вычитающего счетчика импульсов пере мещения, выход нуля вычитающего счетчика импульсов перемещения соединен
1405028
ного перемещения является также последним импульсом торможения,
Известный программно-управляемый модуль характеризуется невозможностью программирования величины минимальной скорости перемещения, чем и .объясняется его функциональная ограниченность.
Согласно приведенному анализу и расчету получены ориентировочные данные по достигаемому эффекту при использовании программно-управляемого модуля-: функциональное расшнре
Формула изобретения
Программно-управляемый модуль, содержащий генератор импульсов первый и второй элементы И, RS-триггер, ма-. гистраль данных, элемент ИЛИ, первый управляемый делитель частоты, управляющие входы которого соединены с разрядными выходами реверсивного счетчика импульсов, второй управляе- мьш делитель частоты, управляющие входы которого соединены с первыми управляющими выходами регистра задания, вторые управляющие вькоды которого соединены с управляющими входами мультиплексора, тактовый вход которого- соединен с выходом первого формирователя импульсов, первые и вторые информационные входы блока совпадения соединены соответственно с информационными выходами суммирующего счетчика, импульсов разгона и вычитающего счетчика импульсов пере мещения, выход нуля вычитающего счетчика импульсов перемещения соединен
с шиной Конец работы, магистраль данных соединена с информационными входами регистра задания, информационными входами вычитающего счетчика импульсов максимальной скорости и с шиной Конец работы, второй выход генератора импульсов соединен со счетным входом второго управляемого делителя частоты, выход которого соединен с первым входом первого элемента И и первым входом второго элемента И, второй вход которого соединен с прямым выходом RS-триггера, R-вход которого соединен с шиной Конец работы, а S-вход - с первым входом элемента ИЛИ и с выходом блока совпадения, второй вход элемента ИЛИ соединен с выходом вычитающего счетчика импульсов максимальной скорости, сум- .мирующий и вычитающий входы реверсивного счетчика импульсов соединены с выходами соответственно первого и второго элементов И, о т л и ч а ю- щ и и с я тем, что, с целью расширения функциональных возможностей за счет программирования минимальной скорости перемещения, в него введены регистр минимальной скорости, второй формирователь импульсов, первый и второй D-триггеры, третий элемент И, выход которого соединен с входом первого управляемого делителя частоты, первый и второй входы третьего элемента И соединены соответственно с
От магистрали.
Л
Ч ч Ч,
,п
му ьтиплехсору
Велич. цскор.
Фиг.2
5
первым выходом генератора импульсов и с прямым выходом первого D-тригге- ра, С-вход которого соединен с С-вхо- дом второго D-триггера, с управляющим входом реверсивного счетчика импульсов и с выходом второго формирователя импульсов, вход которого соединен с третьим выходом регистра задания, R-вход первого D-триггера соединен с шиной Конец работы, R-вход второго D-триггера - с выходом элемента ИЛИ, информационные входы первого и второго D-триггеров постоянно соединены с шиной логической единицы, прямой выход второго D-триггера соединен с входом разрешения счета вычитающего счетчика импульсов максимальной скорости, с вторым входом первого элемента И и с входом разрешения счета суммирующего счетчика импульсов разгона, счетный вход которого соединен со счетным входом вычитающего счетчика импульсов перемещения и с
5 выходом первого формирователя импульсов, вход сброса суммирующего счетчика импуль сов разгона соединен с шиной Конец работы, разрядные выходы регистра минимальной скорости соединеQ ны с информационными входами реверг- сивного счетчика импульсов, информационные входы регистра задания - с магистралью данных, а выходы мультиплексора - соответствующими выходами программно-управляемого модуля.
0
II П ч
.f
пак С
F
макс
./2 макс
ин
Ж
/
/
I
. i
I
-К
I
J
Ij
1
I
л
торм j Atj
Фи&.
){,if
-д
-X,-if
. У
л
.х,
Фа г 5
| Устройство для разгона и торможения электропривода | 1984 |
|
SU1177795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Программно-управляемый модуль | 1986 |
|
SU1327066A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
