1
Изобретение относится к автоматике и вычислительной технике и,в частности, к устройствам регистрации информации.
Известен,линейный интерполятор, содержащий собирательную схему, последовательно соединенные регистр, .в которЬш , записывается код тангенса угла наклона интерполируемого участка, вентили, сумматор, схему анализа знака и счетчик, в Ко- тЪрый записывается код большего приращения координаты. Такие интерполяторы сложны, работа их возможна только в комплексе с вычислительной машиной, т.н. в каждом цикле преобразования необходимо сравнивать приращения, определять большее из них и вычислять тангенс угла, наклона.
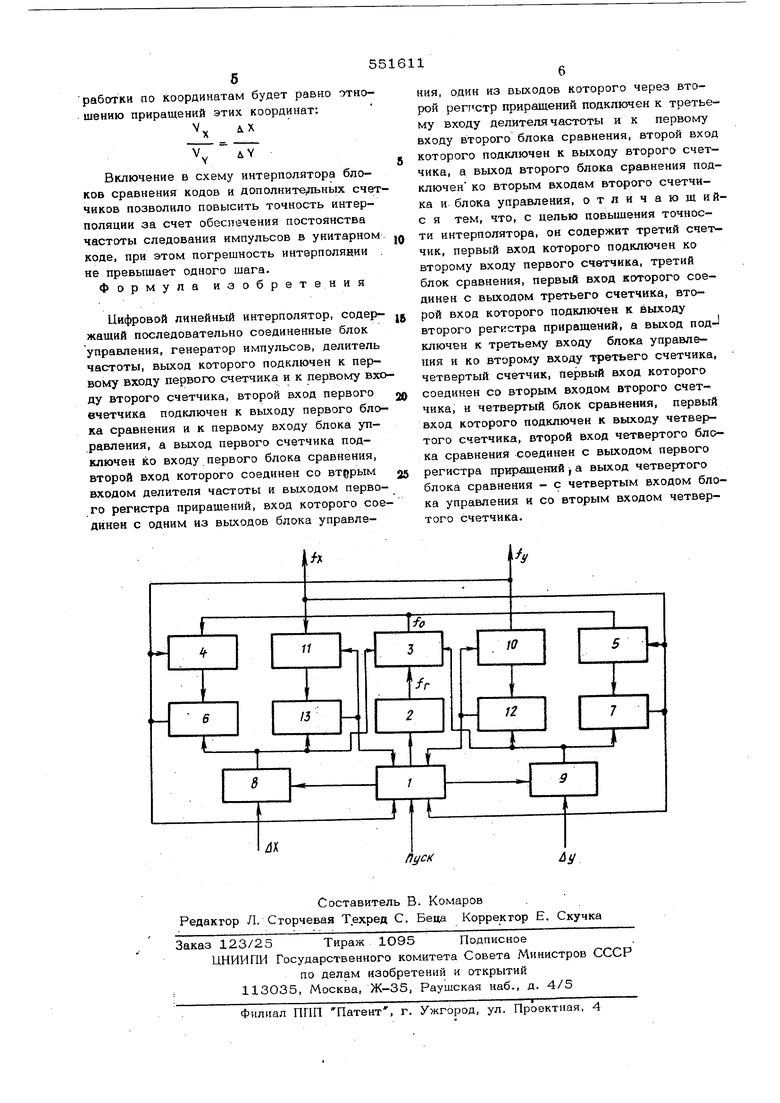
Наиболее близким техническим решением к данному изобретению является ;цифровой линейный интерполятор, содержащий последовательно соединенные блок управления, генератор импульсов, делитель частоты, выход кбторого подключен к первому входу первого счетчика и к первому входу второго счетчика, второй вход первого счетчика подключен к выходу первого блока сравнония и к первому входу блока управления, а выход первого счетчика подключен ко входу первого блока сравнения, второй вход которого соединен со вторым входом делителя частоты и выходом первого регистра приращений, вход которого соединен-с одним из выходов блока управления, один из. выходов которого через второй регистр приращений подключен к третьему входу делителя частоты и к первому входу второго блока сравнения, второй вход которого подключен к выходу второго счетчика, а выход второго блока Сравнения подключен ко вторым входам второго счетчика и блока управления. Недостатком этого интерполятора является то, что частота импульсов в унитарном коде на его выходе только в среднем пропорциональна заданному числу. Это приводит к увеличению погрешности интерполяции, т.к. отклонение фактической траектории движения регистрирующего органа от исходной прямой линии, определяемое степенью неравномерности число-импульсного кода, будет большим. Цель изобретения - повышение точности интгрполятора. Это достигается тем, что интерполятор содержит третий счетчик, первый вход которого соединен со вторым Ьходом первого счетчика, третий блок сравнения, первый вход которого соединен с выходом третьего счетчика, второй вход которого подключен к выходу второго регистра прирашений, а выход подключен к третьему входу блока управленш и ко второму входу третье го счетчика, четвертый счетчик, первый вход которого соединен со вторым входом второго счетчика, и четвертый блок сравйения, первый вход которого подключен к выходу четвертого счетчпка, второй вхоД четвертого блока сравнения соединен с выходом нервого регистра прир щений, а выход четвертого блока сравнения - с четвертым входом блока управления и со вторым входом четвертого счет чяка. Блок-схема интерполятора представлена на чертеже. Интерполятор содержит блок управления 1, генератор импульсов 2, делитель частоты 3, первый счетчик 4, второй счет- чяк 5, первый блок сравнения 6, второй блок сравнения 7,первый регистр прнрашеяия 8 ( Д X ),tвторой регистр приращения 9 ( лУ ). третий счетчик 10, четвертый счетчик 11, третий блок сравнения 12 и четвертый блок сравнения 13. Интерполятор работает следующим об разом. По сигналу Пуск блок управления 1 разрешает запись кодов приращений координат ДХ и ДУ в регистры 8 и 9 и поступление импульс Ов из генератора 2, который соединен со входом делителя часто,ты 3,- имеющего несколько выходов. Выбор одного из выходов делителя частоты осуществляется в зависимости от величин при ращений координат так, что, чем больше прирао ния координат, тем меньше коэффициент деления делителя частоты и вьшде частота fg Импульсы с частотой f поступают на счет ные входы счетчиков 5 и 4; Поступление импульсов в счетчики 4 и 5 продолжается до момента срабатывания соответствующих им блоков сравнения 6 и 7, которые выдают сигнал в момент равенства числа импульсов, накопленных в соответствующем счетчике и числа в соответствующем регистре. При этом происходит установка счетчиков 4 и 5 в состояние О по сигналам с блоков сравнения 6 и 7 и.новое их заполнение ; импульсами до очередного срабатывания блоков сравненич. -Этот процесс происходит непрерывно. Выходные сигналы блоков сравнения образуют унитарные коды. Частоты следования импульсов в унитарных кодах по координатам равны: причем мгновенные значения этиЛ частот за время преобразования сютаются постоянными. При этом число импульсов в унитарном коде каждого из каналов равно числу, записанному в регистре данного канала, т.е. приращению по каждой из координат. Действительно, импульсы с частотами следования 1 и f поступают на счетные входы соответствующих счетчиков - 10 и 11. Накопление импульсов в счетчиках 10 и 11 происходит :до момента срабатывания блоков сравнения 13 и 12, которые выдают в блок управления 1 сигнал в момент равенства числа импульсов, накопленных в соответствующем счетчике и числа, записанного в соответствующем регистре. По сигналам с блоков сравнения 13 и 12 блок управления 1 прекращает поступление импульсов на счетчики 4 и 5. Если приращение по какой-либо из координат, например Д X , будет равно О, то блок управления 1 по совпадению сигнала Пуск и сигнала, который выдаст блок сравнения 6, заблокирует выход блока сравнения 7 и н& выходе интерполятора по координате X импульсы унитарного кода будут отсутствовать. Не будут поступать импульсы и на вход счетчика 11. Кроме того, блок управления 1 запишет единицу в младший разряд регистра 8. Таким образом, импульсы унитарного кода с выхода блока сравнения 6 будут поступать на рьрсод интерполятора по каналу Y и на счетный вход счетчика 10 с максималь-. ной частотой, равной f . Процесс преобразования заканчивается при срабатывании блока сравнения 12, который выдает сигнал в блок управления 1 при равенстве числа импульсов, накопленных в счетчике 1О и числа, записанного Б регистре 9. Таким образом, на выходах интерполятора получаются унитарные коды, частоты следования импульсов в которых, а значит и скорости отработки исполнительных систем по каждой из координат, обратно пропорциональны величине приращения по другой координате. деК- коэффициент пропорциональности. Следовательно, отношение скоростей от
| название | год | авторы | номер документа |
|---|---|---|---|
| Контурная система программного управления | 1991 |
|
SU1800446A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1709269A1 |
| Линейный интерполятор | 1986 |
|
SU1416940A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| ИНТЕРПОЛЯТОР | 1970 |
|
SU272415A1 |
| Цифровой линейный интерполятор | 1982 |
|
SU1065825A1 |
| Линейный интерполятор для цифровых двухкоординатных систем програмного управления | 1973 |
|
SU499555A1 |
| Устройство для задания программы | 1986 |
|
SU1363139A1 |
