| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1988 |
|
SU1656652A1 |
| Следящий электропривод | 1984 |
|
SU1275368A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Задающее устройство для электропривода | 1987 |
|
SU1443109A1 |
| Электропривод постоянного тока | 1981 |
|
SU959248A1 |
| ГОЛОВКА САМОНАВЕДЕНИЯ | 2009 |
|
RU2415375C1 |
| Электропривод | 1987 |
|
SU1453569A1 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2001 |
|
RU2208217C2 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2476815C1 |
Изобретение относится к системам автоматического управления электроприводами. Целью изобретения является повышение надежности в работе и помехозащищенности электропривода. Следящий электропривод содержит сум. матор 1, регулятор 2, согласующий блок 3, объект управления 4, датчик положения 5, компаратор переустановки 6, пиковый детектор 7 с ограничением по входу, компаратор торможет - ния 8, формирователь 9 импульса торможения. В устройстве обеспечивается оптимальный закон переустановки, например, низкоскоростного электродвигателя с максимальной скоростью,4 ил.
Jin О ГО
to
со
ОР
1 14 Изобретение относится к системам автоматического управления и может быть использовано в системах управления электроприводами,
,Целью изобретения является повышение надежности работы и помехозащищенности следящего электропривода. На фнг„ 1 изображена функциональная схема следящего электропривода; на фиг, 2 - схема формирователя импульса торможения; на фиг. 3 - диаг- рамг-ia работы компаратора переуста
новки; на фиг„ 4 - диаграмма работы блока коррекции.
Электропривод содерлшт сумматор 1, регулятор 2, согласующий блок 3, объект 4 управления 5 .датчик 5 положе
ния
30
, компаратор 6 переустановки, пиковый детектор 7 с ограничением по входу (с уровнем S, ), компаратор 8, торможения, формирователь 9 импульса торможения, причем пиковый детектор 7 с ограничением по входу и компаратор 8 торможения образуют блок 10 коррекции.
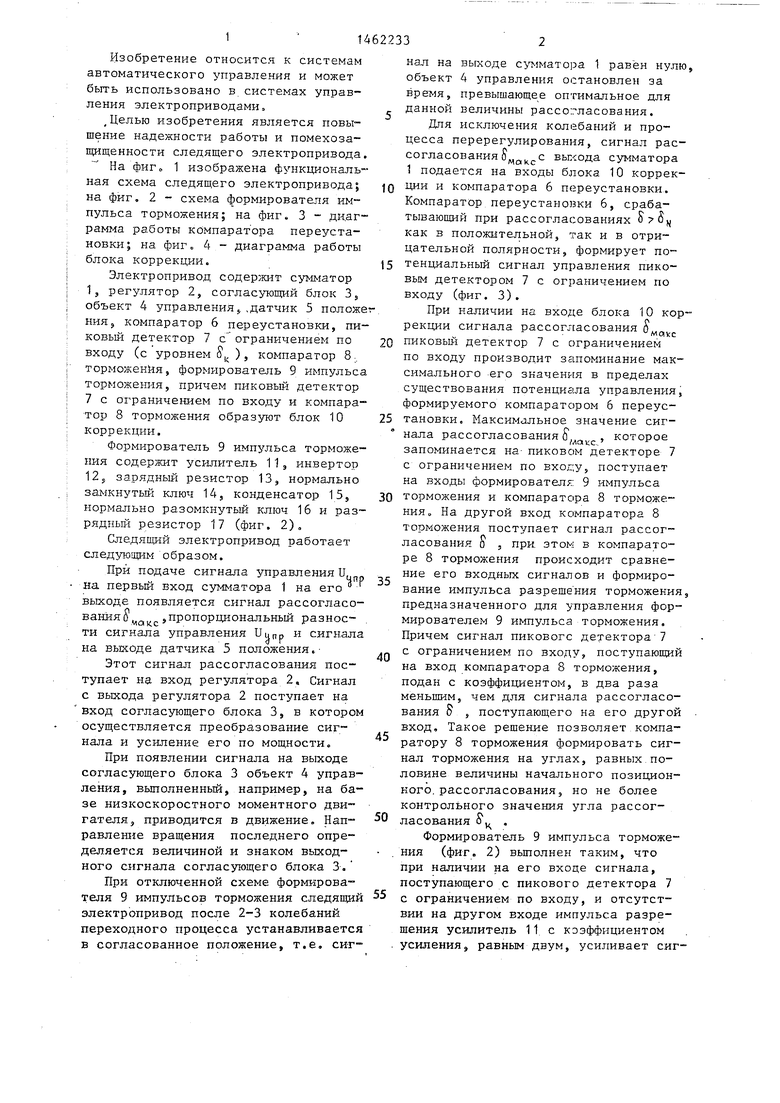
Формирователь 9 импульса торможения содержит усилитель 11, инвертор 12 зарядный резистор 13, нормально замкнутый ключ 14, конденсатор 15, нормально разомкнутый ключ 16 и разрядный резистор 17 (фиг. 2).
Следящий электропривод работает следующим образом.
При подаче сигнала управления V на первьй вход сумматора 1 на его выходе появляется сигнал рассогласования пропорциональный разности сигнала управления Uunp и сигнала на выходе датчика 5 положения.Этот сигнал рассогласования поступает на вход регулятора 2, Сигнал с выхода регулятора 2 поступает на вход согласующего блока 3, в котором осуществляется преобразование сигнала и усиление его по мощности.
При появлении сигнала на выходе согласующего блока 3 объект 4 управления, вьшолненный, например, на базе низкоскоростного моментного дви гателя, приводится в движение, Нап- равлешге вращения последнего определяется величиной и знаком выходного сигнала согласзпощего блока 3,
При отключенной схеме формирова40
45
50
При наличии на входе блока 10 ко рекции сигнала рассогласования S
макс
20 пиковый детектор 7 с ограничением
по входу производит запоминание мак симального его значения в пределах существования потенциала управления формируемого компаратором 6 переус- 25 тановки. Максимальное значение сигнала рассогласования 5 , которое запоминается на- пиковом детекторе 7 с ограничением по вхосу, поступает на входы формирователя: 9 импульса торможения и компаратора 8 торможения „ На другой вход компаратора 8 торможения поступает сигнал рассогласования S , при. этом в компараторе 8 торможения происходит сравнение его входных сигналов и формирование импульса разреше ния торможени предназначенного для управления фор мирователем 9 импульса торможения. Причем сигнал пиковогс детектора 7 с ограничением по входу, поступающи на вход компаратора 8 торможения, подан с коэффициентом, в два раза
меньшим, чем для сигнала рассогласо вания 5 , поступающего на его друго вход. Такое решение позволяет компа ратору 8 торможения формировать сиг нал торможения на углах, равных.половине величины начального позицион ного, рассогласования, но не более контрольного значения угла рассогласования S .
Формирователь 9 импульса торможе ния (фиг, 2) вьтолнен таким, что при наличии на его входе сигнала, поступающего с пикового детектора 7
теля 9 импульсов торможения следящий 5 ограничением по входу, и отсутстэлектропривод после 2-3 колебаний переходного процесса устанавливается в согласованное положение, т,е, сигвии на другом входе импульса разрешения усилитель 11. с коэффициентом усиления, равным двум, усиливает си
10
30
0
5
0
нал на выходе с мматора 1 равен нулю, объект 4 управления остановлен за время, превышающее оптимальное для данной величины рассогласования.
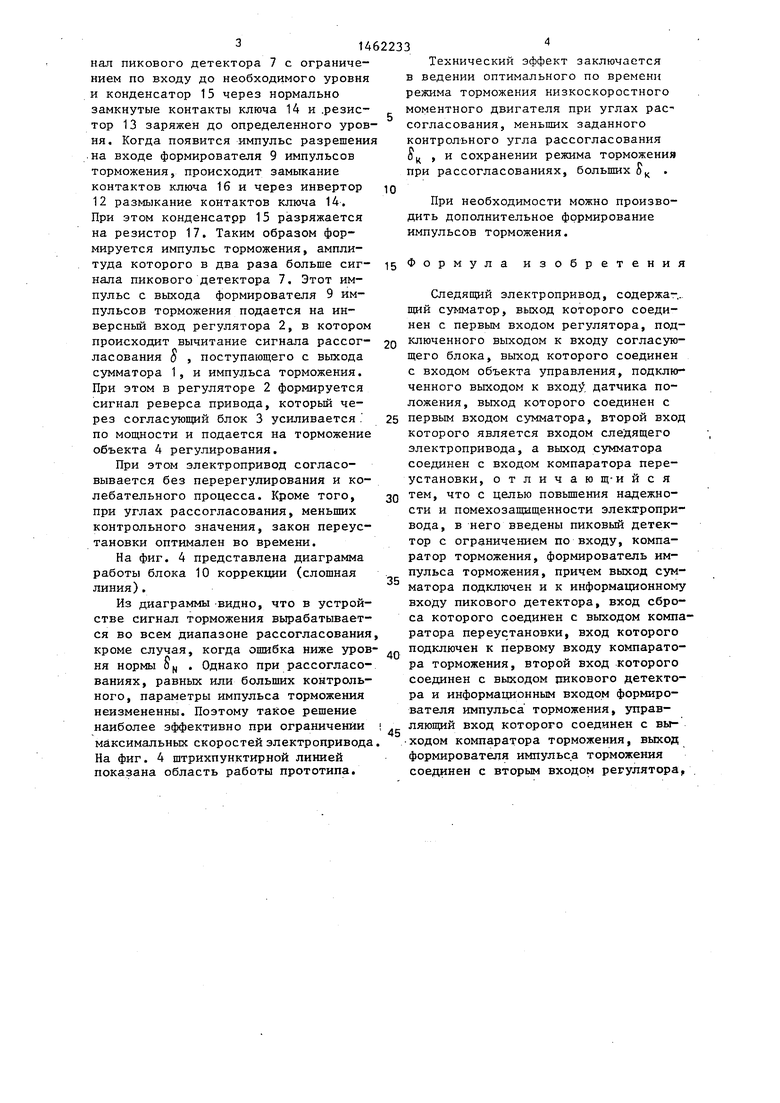
Для исключения колебаний и процесса перерегулирования, сигнал рассогласования 5, с сумматора 1 подается на входы блока 10 коррекции и компаратора 6 переустановки. Компаратор переустановки 6, срабатывающий при рассогласованиях S как в положительной, так и в отрицательной полярности, формирует по15 тенциальный сигнал управления пиковым детектором 7 с ограничением по входу (фиг. 3).
При наличии на входе блока 10 коррекции сигнала рассогласования S
макс
20 пиковый детектор 7 с ограничением
по входу производит запоминание максимального его значения в пределах существования потенциала управления, формируемого компаратором 6 переус- 25 тановки. Максимальное значение сигнала рассогласования 5 , которое запоминается на- пиковом детекторе 7 с ограничением по вхосу, поступает на входы формирователя: 9 импульса торможения и компаратора 8 торможения „ На другой вход компаратора 8 торможения поступает сигнал рассогласования S , при. этом в компараторе 8 торможения происходит сравнение его входных сигналов и формирование импульса разреше ния торможения, предназначенного для управления формирователем 9 импульса торможения. Причем сигнал пиковогс детектора 7 с ограничением по входу, поступающий на вход компаратора 8 торможения, подан с коэффициентом, в два раза
меньшим, чем для сигнала рассогласования 5 , поступающего на его другой вход. Такое решение позволяет компаратору 8 торможения формировать сигнал торможения на углах, равных.половине величины начального позиционного, рассогласования, но не более контрольного значения угла рассогласования S .
Формирователь 9 импульса торможения (фиг, 2) вьтолнен таким, что при наличии на его входе сигнала, поступающего с пикового детектора 7
5 ограничением по входу, и отсутствии на другом входе импульса разрешения усилитель 11. с коэффициентом усиления, равным двум, усиливает сиг
314
нал пикового детектора 7 с ограничением по входу до необходимого уровня и конденсатор 15 через нормально замкнутые контакты ключа 14 и .резистор 13 заряжен до определенного уровня. Когда появится импульс разрешени .на входе формирователя 9 импульсов торможения, происходит замыкание контактов ключа 16 и через инвертор 12 размыкание контактов ключа 14. При этом конденсатрр 15 разряжается на резистор 17. Таким образом формируется импульс торможения, амплитуда которого в два раза больше сигнала пикового детектора 7. Этот импульс с выхода формирователя 9 импульсов торможения подается на инверсный вход регулятора 2, в котором происходит вычитание сигнала рассогласования 8 , поступающего с выхода сумматора 1, и импульса торможения. При этом в регуляторе 2 формируется сигнал реверса привода, который через согласующий блок 3 усиливается . по мощности и подается на торможение объекта 4 регулирования.
При этом электропривод согласовывается без перерегулирования и колебательного процесса. Кроме того, при углах рассогласования, меньших контрольного значения, закон переустановки оптимален во времени.
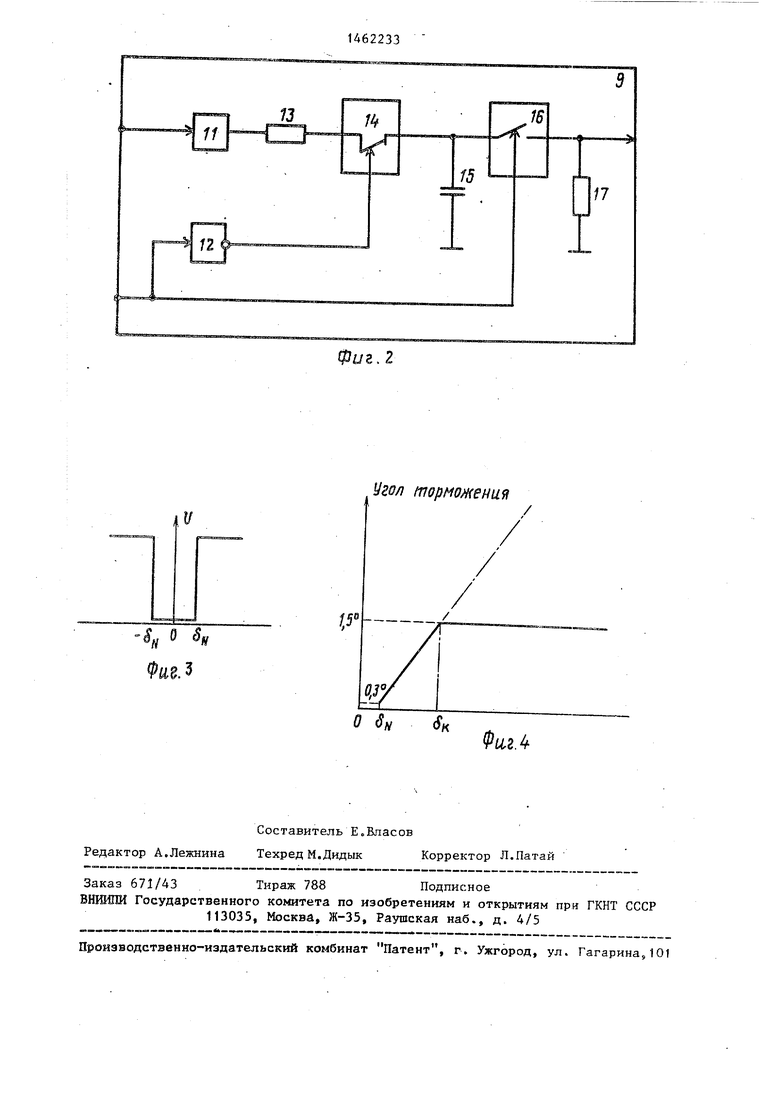
На фиг. 4 представлена диаграмма работы блока 10 коррекции (слошная линия).
Из диаграммы видно, что в устройстве сигнал торможения вырабатывается во всем диапазоне рассогласования кроме случая, когда ошибка ниже уров
ня нормы 0(j . Однако при рассогласованиях, равных или больших контрольного, параметры импульса торможения неизмененны. Поэтому такое решение наиболее эффективно при ограничении максимальных скоростей электропривода На фиг. 4 штрихпунктирной линией показана область работы прототипа.
Технический эффект заключается в ведении оптимального по времени режима торможения низкоскоростного моментного двигателя при углах рассогласования, меньших заданного контрольного угла рассогласования S , и сохранении режима торможения при рассогласованиях, больших 5 .
При необходимости можно производить дополнительное формирование импульсов торможения.
15 Формула изобретения
Следящий электропривод, содержа-,, щий сумматор, выход которого соединен с первым входом регулятора, подключенного выходом к входу согласующего блока, выход которого соединен с входом объекта управления, подключенного выходом к вход, датчика положения, выход которого соединен с первым входом сумматора, второй вход которого является входом следящего электропривода, а выход сумматора соединен с входом компаратора пере
установки, отличаю щ-ийся
5
0
5
сти и пoмexoзaшJdщeннocти электропривода, в него введены пиковый детектор с ограничением по входу, компаратор торможения, формирователь импульса торможения, причем выход сумматора подключен и к информационному входу пикового детектора, вход сброса которого соединен с выходом компаратора переустановки, вход которого подключен к первому входу компаратора торможения, второй вход которого соединен с выходом цикового детектора и информационным входом формирователя импульса торможения, управляющий вход которого соединен с выходом компаратора торможения, выход формирователя импульса торможения соединен с вторым входом регулятора, .
13
фиг. 2
г/
l« о ,
я
f
16
Угол тормтения
/
О SN сУк
fe.4
| Система позиционирования | 1985 |
|
SU1282080A1 |
| G | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящий электропривод | 1984 |
|
SU1275368A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
