к
сд со о
00 Изобретение относится к автоматике, в частности к системам автоматического управления, и может быть использовано в системах управления раз личных промышленных и транспортных установок. Целью изобретения является повышение точности .следящего электропривода. На фиг.1 изображена структурная схема следящего электропривода; на фиг.2 - пример реализации согласующего устройства; на фиг.З - пример реализации блока коррекции; на фиг,4-- пример реализации блока нелинейной коррекции; на фиг.З - характеристика компаратора; на фиг.6статическая характеристика усилител Электропривод содержит сумматор 1, регулятор 2, согласующее устройство 3, объект А управления, датчик 5 положения, датчик 6 скорости,усилитель 7, блок 8 нелинейной коррекции, компаратор 9, блок 10 коррекции, первьй 11, второй 12 и третий 13 входы блока 8 нелинейной коррекции, первьй 14 и второй 15 входы со гласующего устройства 3, Согласующее устройство 3 содержит генератор 16 пилообразных напряже.:НИИ, компаратор 17 и усилитель 18 ; мощности, Блок 10 коррекции содержит первы 19 и второй 20 операционные усилите ли и пассивные элементы 21 - 23, Блок 8 нелинейной коррекции содержит первый 24, второй 23, третий 26 и четвертый 27 ключи, одновибратор 28, -операционный усилитель 29, второй 30 операционньш усилитель и пассивные элементы 31 - 33. Следящий электропривод работает следующим образом. При подаче сигнала управления и на первый вход сумматора 1 на его выходе появляется сигнал рассогласования, пропорциональный разности сигналов управления Uy и сиг нала на выходе датчика 5-положения, .Этот сигнал рассогласования поступает на вход регулятора 2, который производит усиление и формирование этого сигнала. Сигнал с выхода регу лятора 2 поступает на вход согласую щего устройства 3, в котором осуществляется усиление сигнала по мощно сти и преобразование. При появлении сигнала на выходе согласующего устройства 3 объект 4 управления приводится в движение, скорость и направление которого определя1Йтся величиной и знаком выходного сигнала согласующего устройства 3. На выходе датчика 5 положения появляется нарастающий сигнал, который поступает на второй вход сумматора 1, При равенстве сигнала управления U и сигнала с выхода датчика 5 положения на выходе сумматора 1 имеется нулевой сигнал, а объект 4 управления прекращает свое движение и занимает новое положение, соответствующее величине сигнала управления U . При малой величине сигнала на выходе сумматора 1 на выходе компаратора 9 присутствует положительный сигнал (логическая 1), который определяется характеристикой компаратора 9, имеющего на своем выходе положительный сигнгш при малых величинах сигнала на его входе, и нулевой сигнал при больших величинах сигнала на его входе. Далее положительньй сигнал поступает на третий вход 13 блока 8 нелинейной коррекции, в котором происходит дифференцирование сигнала усилителя 7, имеющего нелинейную характеристику (фиг,6), Дифференцирование производится по переднему фронту положительного сигнала на выходе компаратора 9,Далее усилитель 7 не влияет на состояние блока 8 нелинейной коррекции,так как дифференцируется величина сигнала с выхода усилителя 7 только в момент поступления фронтов положительного сигнала с выхода компаратора 9 и .только в том случае, если присутствует разреЕ1ающий (.нулевой потенциал) сигнал на выходе блока 10 коррекции. Блок 10 коррекции выполнен так, что если на его входе сигнал уменьшается, то на выходе имеется положительньй сигнал (единица), а в том случае, когда сигнал на входе не изменяется или увеличивается, то на выходе его нулевой потенциал. На выходе блока 8 нелинейной коррекции появляется пилообразньш импульсный сигнал,полярность, величина и длительность которого определяются выходным сигн;1лом усилителя 7, зависящим от скорости объекта 4 управления в момент срабатывания компаратора 9, Аналогичным образом ведет себя блок 8 нелинейной коррекции при отключении компаратора 9 из состояния единицы в состояние ноль, т.е. в мо мент выхода сигнала на выходе сумма тора 1 из зоны,, определяемой компаратором 9. Импульсный сигнал с выхода блока 8 нелинейной коррекции поступает на второй вход 15 согласующего устройства 3. При этом он всегда находится в противофазе по отношению к сигналу на выходе регулятора 2 и является тормозящим для следящего электропривода. Таким образом, при от15аботке еле дящим электроприводом разности между величиной сигнала управления и и величиной сигнала на выходе датчика 5 положения при некоторой небольшой величине сигнала на выходе сумматора 1 блок 8 нелинейной ко рекции вырабатывает импульс торможе кия,причем при работе следящего эле тропривода по переднему фронту компаратора 9, т.е. при отработке ступенчатого и гармонического входных сигналов, следящий привод также обладает высокими динамическими свойствами. Устройство может найти применени при выполнении высокоточных следящи электроприводов различного назначен к которым предъявляются повьшенные требования как к статической, так и 684 динами ческой точности отработки заданного сигнала управления, Наибольший эффект предлагаемое устройство может дать в таких следящих электроприводах, где закон изменения сигнала управления заранее известен, что позволяет наиболее точно выбрать зону выработки импульсов торможения и их длительность. Формула изобретения Следящий электропривод, содержащий последовательно соединенные сумматор, регулятор, согласующее устройство, объект управления и датчик положения, выход которого соединен с вторьм входом сумматора, первый вход которого является входом электропривода, отличающийся тем, что, с целью повышения точности, в него дополнительно введены компаратор иблок коррекции, а также последовательно соединенные датчик скорости, усилитель и блок нелинейной коррекции, выход которого Соединен с вторым входом согласующего устройства, выход усилителя через блок коррекции соединен с вторым входом блока нелинейной коррекции, третий вход которого через компаратор соединен с выходом сумматора, а второй выход объекта управления соединен с входом датчика скорости.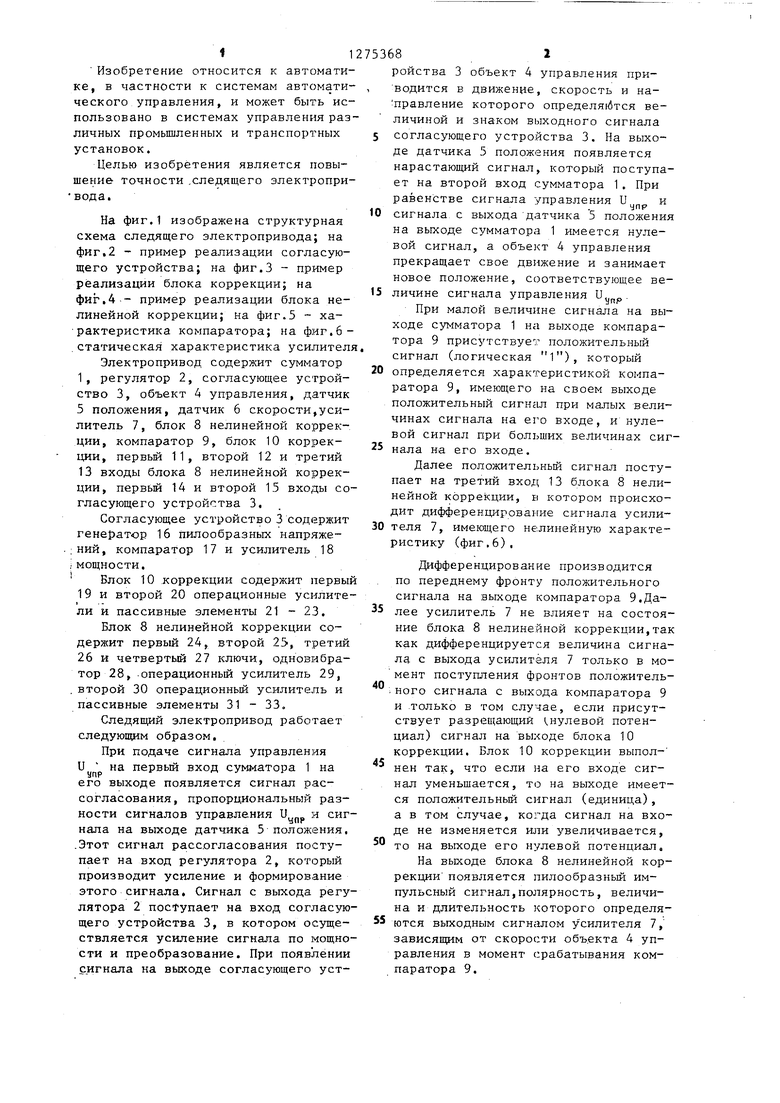

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1987 |
|
SU1462233A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Способ адаптивного управления исполнительным механизмом | 2023 |
|
RU2821298C1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Релейно-импульсная следящая система | 1984 |
|
SU1241190A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |


Изобретение относится к области систем автоматического управления электроприводами. Целью изобретения является повышение точности следящего электропривода. Следящий электропривод содержит сумматор, регулятор, согласующее устройство, объект управления, датчики положения и скорости, блок нелинейной коррекции, блок коррекции, компаратор. Сущность изобретения заключается во введении импульсной коррекции,при которой не требуется установки специальных линейных корректирующих фильтров в цепи датчика скорости. 6 ил. сл
ffUZ.f
T
fS
. 2
Z}
23 //
it
г-1 Н з-4f
2J Zl
I Й fblii it
LLZ.S
9uz.6
| Следящие приводы./Под ред | |||
| Б.К.Чемоданова, кн.2, М.: Энергия, 1976, с.133 | |||
| Усынин Ю.С, Управление замкнутыми электроприводами: Учебное пособие | |||
| - Челябинск, ЧПИ, 1978,с,16-18. |
